Stáhnout prezentaci
Prezentace se nahrává, počkejte prosím

1
MOBILNÍ MAPOVACÍ SYSTÉMY
(= mobilní skenovací systémy) Diplomový seminář HE Klusoňová Pavla
 Diplomový seminář HE18 Klusoňová Pavla.")
2
MOBILNÍ MAPOVACÍ SYSTÉMY (MMS)
systémy se objevily po roce 2000 aplikace pro rychlý a efektivní sběr geoinformačních dat (pro potřeby mapování nebo GIS aplikace) využíváno především v zastavěných částech území, kde dochází k rychlým změnám infrastruktury budov, silnic atd., a které není možné dostatečně efektivně zachytit tradičními metodami Základní skladba zařízení pro určování polohy MMS a pro georeferenci dat ze senzorů: řídící jednotka GNSS přijímač IMU externí odometry připojené ke kolům vozidla Mezi taková zařízení patří především různé typy digitálních kamer a laserových skenerů. Významné mapovací společnosti: Google, Tele Atlas, NAVTEQ
 využíváno především v zastavěných částech území, kde dochází k rychlým změnám infrastruktury budov, silnic atd., a které není možné dostatečně efektivně zachytit tradičními metodami. Základní skladba zařízení pro určování polohy MMS a pro georeferenci dat ze senzorů: řídící jednotka. GNSS přijímač. IMU. externí odometry připojené ke kolům vozidla. Mezi taková zařízení patří především různé typy digitálních kamer a laserových skenerů. Významné mapovací společnosti: Google, Tele Atlas, NAVTEQ.")
3
Ukázka konfigurace: GPS IMU DMI = snímač otáček kola

4
LASEROVÉ SKENOVÁNÍ Laserové skenovací systémy umožňují s mimořádnou rychlostí, přesností, komplexností a bezpečností: bezkontaktní určování prostorových souřadnic 3D modelování, vizualizaci složitých staveb a konstrukcí, interiérů, podzemních prostor, libovolných terénů atp. Nasnímaný objekt může být pomocí softwaru zobrazen ve formě mračen bodů, na jejichž základě může být vytvořen model objektu, který lze převést do CAD systému. Většina skenovacích systémů využívá nejmodernější pulsní laserovou technologii pro měření délek a určuje polohu bodů prostorovou polární metodou.

5
PRINCIP SKENERŮ

6
LASEROVÉ SKENOVÁNÍ POZEMNÍ (Terrestrial laser scanning – TLS)
fixovaná pozice během skenování LETECKÝ (Airbone laser scanning – ALS) nesený letadlem (Fixed Wing), vrtulníkem (Rotor Wing), UAV (Unmanned Aerial Vehicle) MOBILNÍ (Mobile laser scanning – MLS) nesený automobilem, čtyřkolkou, lodí, drezínou,…
 nesený letadlem (Fixed Wing), vrtulníkem (Rotor Wing), UAV (Unmanned Aerial Vehicle) MOBILNÍ (Mobile laser scanning – MLS) nesený automobilem, čtyřkolkou, lodí, drezínou,…")
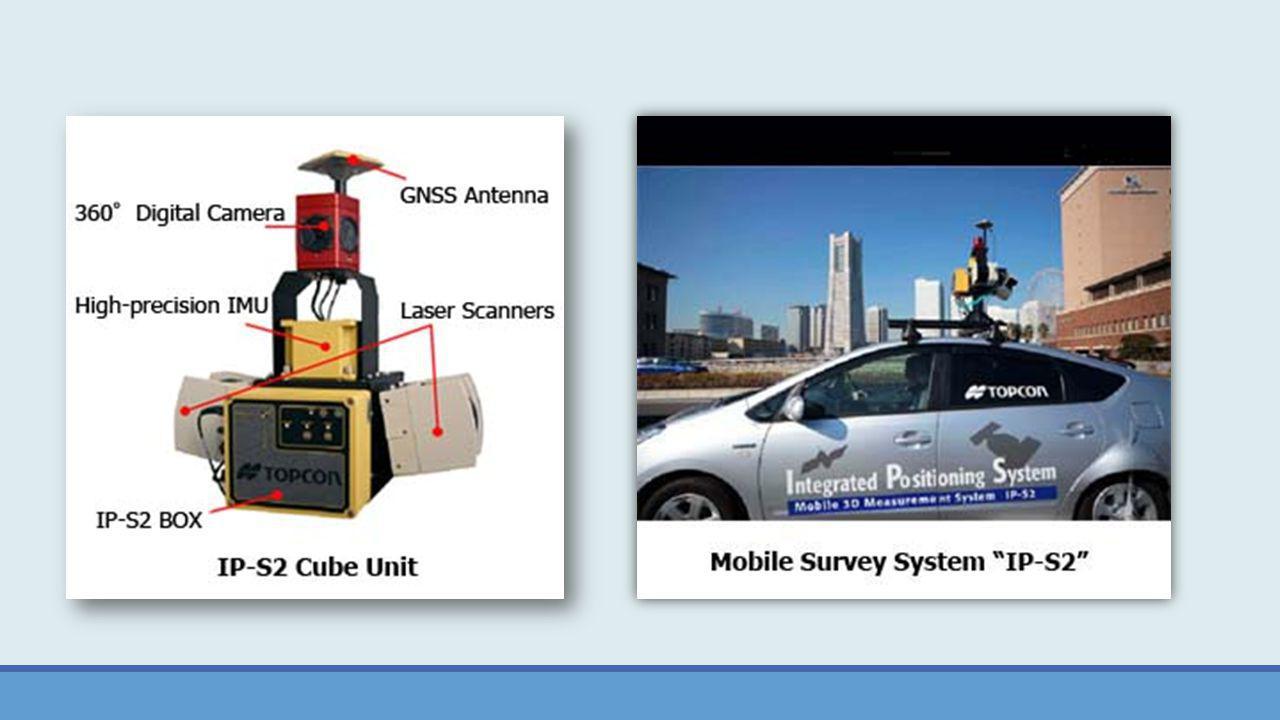
7
MMS IP-S2 TOPCON FIRMY: RIEGEL LASER MEASUREMENT SYSTEMS OPTECH INC
MITSUBISHI ELECTRIC CORPORATION TOPSCAN 3D MAPPNG SOLUTIONS

8
PRINCIP MMS Nosič laserového skeneru se pohybuje po nelineární trajektorii, pro správné určení polohy podrobných bodů je třeba znát pro každý okamžik měření přesnou polohu nosiče a směr měření. Tyto informace se zajistí pomocí GNSS a IMU technologie. Zcela zásadně záleží na přesnosti IMU jednotky. Je – li nosičem letadlo nebo automobil je v současné době téměř jedno, ale je jasné, že automobil dělá rychlejší změny pohybu i směru jízdy. GNSS IMU IMU = zařízení obsahující pro inerciální navigaci gyroskopy a akcelerometry, které určují nezávisle na prostorové poloze senzoru jeho úhlové prvky vnější orientace vůči přijatému souřadnicovému referenčnímu systému

9
PROSTOROVĚ NAMĚŘENÁ DATA jsou určena na základě:
PARAMETRY SKENERU Frekvence vysílaného laserového pulzu (př.: f= 100 kHz → bodů za sekundu) Směr a rozsah vysílaného paprsku (určen vnitřním systémem laseru případně otáčením celého přístroje kolem svislé osy) ČASOVÉ A PROSTOROVÉ ROZLIŠENÍ (nastaveno pro dané skenování) RYCHLOST VOZIDLA V současnosti se používají desítky paralelních skenovacích jednotek, které jsou zacíleny do všech stran – eliminují tak případné nepokryté oblasti, zvyšují počet nasnímaných bodů a přesnost Skener Sick LMS 291, vějířovitý vzor naměřených bodů
 Směr a rozsah vysílaného paprsku (určen vnitřním systémem laseru případně otáčením celého přístroje kolem svislé osy) ČASOVÉ A PROSTOROVÉ ROZLIŠENÍ (nastaveno pro dané skenování) RYCHLOST VOZIDLA. V současnosti se používají desítky paralelních skenovacích jednotek, které jsou zacíleny do všech stran – eliminují tak případné nepokryté oblasti, zvyšují počet nasnímaných bodů a přesnost. Skener Sick LMS 291, vějířovitý vzor naměřených bodů.")
10
DIGITÁLNÍ ZOBRAZOVACÍ ZAŘÍZENÍ
Pro snadnější interpretaci dat získaných skenery je vhodné mít i odpovídající obrazový záznam. K získání digitálního obrazového záznam je nutné integrovat digitální fotoaparáty či kamery do mobilních systémů a zajistit jejich přesnou synchronizaci se systémy GNSS a IMU. V současných systémech se používají zobrazovací zařízení, která jsou vybavena více objektivy a mohou tak snímat v panoramatickém či sférickém záběru (360°). Díky tomu je každý bod zachycen na více snímcích z různých úhlů. Výrobci: Sony, Hitachi, Toschiba, IMC, Pelco Ladybug Dodeca 2360
. Díky tomu je každý bod zachycen na více snímcích z různých úhlů. Výrobci: Sony, Hitachi, Toschiba, IMC, Pelco. Ladybug3 Dodeca")
12
V mobilních mapovacích systémech jsou k dispozici dva observační režimy:
STATICKÝ (“stop-and-go“) Na vozidle je namontován jeden nebo více skenerů. Během doby skenování se pozice a orientace skeneru nemění. Po skenování se vozidlo přesune a pořídí se další sken. Poloha každého mračna bodů je určena v místním souřadnicovém systému, který má 6 (nebo 7) stupňů volnosti: 3 souřadnice referenčního bodu skeneru (počátek SS), 3 úhly rotace os (popřípadě změnu měřítka). Registrace a georeferencování každého mračna bodů může být založeno například na IPC (interační algoritmus nejbližšího bodu) algoritmu v kombinaci s prostorovou podobností transformací založenou na VL se známými souřadnicemi v globálním SS. KINEMATICKÝ(“on-the-fly) Vozidlo se pohybuje po trajektorii bez zastavení a laserový skener skenuje nepřetržitě v rovinném profilu. Každý skenovaný bod je v individuálním SS a proto je nutné sledovat okamžitou polohu referenčního bodu skeneru a orientaci os skeneru v globálním systému s vysokou přesností a časovým rozlišením. Určení polohy pomocí GPS pro MLS je v městském prostředí omezeno a v případě aplikace interiéru (tunely, rozlehlé haly) nemožné kvůli nedostupným GPS satelitům.
 Na vozidle je namontován jeden nebo více skenerů. Během doby skenování se pozice a orientace skeneru nemění. Po skenování se vozidlo přesune a pořídí se další sken. Poloha každého mračna bodů je určena v místním souřadnicovém systému, který má 6 (nebo 7) stupňů volnosti: 3 souřadnice referenčního bodu skeneru (počátek SS), 3 úhly rotace os (popřípadě změnu měřítka). Registrace a georeferencování každého mračna bodů může být založeno například na IPC (interační algoritmus nejbližšího bodu) algoritmu v kombinaci s prostorovou podobností transformací založenou na VL se známými souřadnicemi v globálním SS. KINEMATICKÝ( on-the-fly) Vozidlo se pohybuje po trajektorii bez zastavení a laserový skener skenuje nepřetržitě v rovinném profilu. Každý skenovaný bod je v individuálním SS a proto je nutné sledovat okamžitou polohu referenčního bodu skeneru a orientaci os skeneru v globálním systému s vysokou přesností a časovým rozlišením. Určení polohy pomocí GPS pro MLS je v městském prostředí omezeno a v případě aplikace interiéru (tunely, rozlehlé haly) nemožné kvůli nedostupným GPS satelitům.")
13
POŘIZOVÁNÍ DAT Pro sběr dat musí být všechny senzory propojeny s operačním systémem pracujícím v reálném čase. PC (notebook) slouží jako hostitelský server pro počítadlo reálného času a pro ukládáni dat. Proces sběru: Příprava MMS = inicializace všech použitých senzorů (otočení skeneru na určenou orientaci) Pořizování dat = naměřená data jsou spolu s informací o čase zaznamenána a uložena na PC do databáze měření Ukončování = systém musí být zastaven
 slouží jako hostitelský server pro počítadlo reálného času a pro ukládáni dat. Proces sběru: Příprava MMS = inicializace všech použitých senzorů (otočení skeneru na určenou orientaci) Pořizování dat = naměřená data jsou spolu s informací o čase zaznamenána a uložena na PC do databáze měření. Ukončování = systém musí být zastaven.")
14
PRŮBĚH ZPRACOVÁNÍ Matematický algoritmus kombinuje synchronizované informace ze všech senzorů, potřebných pro prostorové referencování k odvození trajektorie skeneru a orientace os ve zvoleném referenčním systému. K prostorově-časovému referencování se často používá filtrování a vyhlazovaní dat (Kalmanův filtr) tak, aby měření vyhovovalo účelu měření trajektorie. Vizualizace mračna bodů se využívá pro první rychlou kontrolu naměřených dat a je nezbytná pro další zpracování. Mračna bodů jsou ukládána ve formě dlouhých seznamů souřadnic (X, Y, Z) případně s dalšími atributy jako je intenzita a úhel odrazu. POST-PROCESSING (následné zpracování/ úprava dat) Přiřazení dat do požadovaného SS (pouhé převedení do cílového SS) Eliminace nepotřebných či chybových dat - chyby vznikají v závislosti: na atmosférických podmínkách hustý déšť, mlha či sněžení mohou způsobit odraz laserového pulzu dříve než dosáhne měřeného povrchu
 tak, aby měření vyhovovalo účelu měření trajektorie. Vizualizace mračna bodů se využívá pro první rychlou kontrolu naměřených dat a je nezbytná pro další zpracování. Mračna bodů jsou ukládána ve formě dlouhých seznamů souřadnic (X, Y, Z) případně s dalšími atributy jako je intenzita a úhel odrazu. POST-PROCESSING (následné zpracování/ úprava dat) Přiřazení dat do požadovaného SS (pouhé převedení do cílového SS) Eliminace nepotřebných či chybových dat - chyby vznikají v závislosti: na atmosférických podmínkách. hustý déšť, mlha či sněžení mohou způsobit odraz laserového pulzu dříve než dosáhne měřeného povrchu.")
15
VIZUALIZACE - RASTROVÉ OBRAZY
Laserová data mohou být převedena do rastrového obrazu. Možné je zobrazit mračno bodů přímo pomocí bodových rendrovacích metod. VÝŠKOVÉ OBRAZY Tvorba ve třech krocích: Definice mřížky obrazu (velikost pixelu) Určení výšky pro každý pixel Transformace výšky na hodnotu šedé nebo barevné škály Výška je definována jako funkce výšky bodů v rámci pixelu (např: průměr, medián). STÍNOVÉ OBRAZY Vhodný pro vzualizaci lokálních výškových změn, jako jsou střechy budov. OBRAZY INTENZITY K tvorbě obrazu se používá amplituda odraženého laserového pulsu.
 Určení výšky pro každý pixel. Transformace výšky na hodnotu šedé nebo barevné škály. Výška je definována jako funkce výšky bodů v rámci pixelu (např: průměr, medián). STÍNOVÉ OBRAZY. Vhodný pro vzualizaci lokálních výškových změn, jako jsou střechy budov. OBRAZY INTENZITY. K tvorbě obrazu se používá amplituda odraženého laserového pulsu.")
16
OBRAZY HUSTOTY BODŮ Určují se prostým sčítáním bodů v rámci pixelu. BODOVÉ RENDROVÁNÍ Bodová mračna lze procházet přímo pomocí prohlížečů mračen – kromě souřadnic X, Y, Z je umožněno zadat i velikost bodu (v pixelech), barvu a normálu bodu. Normály mohou být dodány společně s body jako výstup skenování nebo se odhadnou později v kroku předzpracování.
![]()
17
Ukázka výstupu

18
ASPEKTY MOBILNÍHO LASEROVÉHO SKENOVÁNÍ
Podrobné zaměření polohopisu a výškopisu snadné generování DMT rychlé a přesné získání podkladů pro projektové práce možnost kombinace s dalšími mapovými podklady (např. s katastrální mapou) okamžitá kontrola průběhu vlastnických hranic Možnost sledování (monitoring) postupu stavebních prací Zaměření stávajícího stavu staveb Sledování změn v okolí komunikace (půdní eroze, skalní sesuvy, růst vegetace,…) Vyhledávání a lokalizace objektů (překážek) v blízkosti komunikací z pohledu bezpečnosti silničního provozu (např. reklamní poutače) Pasportizace dopravního značení
 okamžitá kontrola průběhu vlastnických hranic. Možnost sledování (monitoring) postupu stavebních prací. Zaměření stávajícího stavu staveb. Sledování změn v okolí komunikace (půdní eroze, skalní sesuvy, růst vegetace,…) Vyhledávání a lokalizace objektů (překážek) v blízkosti komunikací z pohledu bezpečnosti silničního provozu (např. reklamní poutače) Pasportizace dopravního značení.")
19
Zjišťování souladu katastrální mapy se skutečností

20
Využití MLS při dokumentaci stavu vozovky – snadné a rychlé využití naměřených dat

21
KLADY A ZÁPORY Rychlost vyhodnocení 1-2 km za 1 den
+ Cena takto získané mapy je poloviční oproti klasicky zaměřené + Přesnost a detailnost mapy je mnohem větší Mapování pouze toho „co je vidět z komunikace“ Případně nutné doměření jinou metodou

22
PROJEKT D11 (Praha – Hradec Králové)
Vzhledem k tomu, že se od roku 2009 začalo provádět ALS středního pásu Čech, projekt VaV MD ČR se zaměřil na laserové skenování objektu právě v této předpokládané části naší republiky tak, aby bylo možno data porovnat a případně kombinovat. Firmou Geovap Pardubice (která zajišťuje v kooperaci s belgickou firmou MLS) byla nasnímána dálnice D11. Celkem bylo provedeno více jízd po dálnici (tam a zpět a ještě jednou pro eliminaci zakrytých prostor – např.: automobily a povětrnostních podmínek)
 byla nasnímána dálnice D11. Celkem bylo provedeno více jízd po dálnici (tam a zpět a ještě jednou pro eliminaci zakrytých prostor – např.: automobily a povětrnostních podmínek)")
23
PROJEKT D11 Využit byl špičkový systém LYNX – parametry:
Běžný skenovací den: 3 miliardy bodů Uliční fronta v zástavbě: 40-80 km/den liniové trasy mimo zastavěné oblasti: až 100km/den dálnice a rychlostní komunikace až 120km/den za 1 den byl zaměřen celý úsek dálnice D11 – 2x tam a zpět LYNX na terénním voze a vnitřní jednotka

24
PROJEKT D11 SNÍMACÍ HLAVY SKENERŮ LYNX pokrytí 360°
rychlost otáčení 9000 otáček/min výstup: pulsů/sec měření až 4 odrazy/puls třída 1.bezpečnosti laserového záření neviditelný svazek paprsků dosah až 200 m zaměření pásu o šířce 400 m

25
Ukázka výstupu z MLS v porovnání s ortofotem, dálnice D11.

26
DĚKUJI ZA POZORNOST

Podobné prezentace

 V ZEMĚDĚLSKÉ PRAXI>")
 (Remote Sensing)>")












>")



