Stáhnout prezentaci
Prezentace se nahrává, počkejte prosím

1
Statická analýza fyziologických systémů Obecné systémové vlastnosti

2
Studijní materiály

3
Chapter 2. Mathematical Modeling Chapter 3. Static analysis of Physiological Systems

4
Proprietární kód klasických programovacích jazyků (např. Ada, Fortran, C,...) Proprietární kód Definice systému Dekompozice systému Modelování subsystémů Odvození kauzality výpočtu (manuální odvození vstupně/výstupních vztahů) Implementace Simulace Modelování Blokové modelovací jazyky Blokové modelovací jazyky (např. Simulink,...) … … … Vstupy do bloku jsou vnější vstupy nebo výstupy z jiných bloků Výstupy z bloku jsou vnější výstupy nebo vstupy do dalších bloků Modelování a simulace Formalizace (modelování) Počítačová simulace
 Proprietární kód Definice systému Dekompozice systému Modelování subsystémů Odvození kauzality výpočtu (manuální odvození vstupně/výstupních vztahů) Implementace Simulace Modelování Blokové modelovací jazyky Blokové modelovací jazyky (např. Simulink,...) … … … Vstupy do bloku jsou vnější vstupy nebo výstupy z jiných bloků Výstupy z bloku jsou vnější výstupy nebo vstupy do dalších bloků Modelování a simulace Formalizace (modelování) Počítačová simulace.")
5
Softwarové nástroje pro tvorbu modelů Matlab/Simulink

6
Softwarové nástroje pro tvorbu modelů Matlab/Simulink

7
Softwarové nástroje pro tvorbu modelů Matlab/Simulink

8
Grafické zobrazení matematických vztahů?

9
FF=GFR/RPF GFR RPF APr B A RBF AffC TubC RAP GFR=NETP*GKf NETP=GP-PTP-AVeCOP PTP=GFR/TubC PAff=RBF/AffC GP=RAP-PAff ACOP=A*Apr+B*(APr)^2 A*Apr B*(APr)^2 (APr)^2 EPr=APr/(1-FF) (1-FF) EPr^2 A*EPr B*EPr^2 ECOP=A*EPr+B*EPr^2 ACOP+ECOP AVeCOP=(ACOP+ECOP)/2 AVeCOP PTP GP GFR TubC GFR GKf Matlab/Simulink Grafické zobrazení matematických vztahů?
^2 A*Apr B*(APr)^2 (APr)^2 EPr=APr/(1-FF) (1-FF) EPr^2 A*EPr B*EPr^2 ECOP=A*EPr+B*EPr^2 ACOP+ECOP AVeCOP=(ACOP+ECOP)/2 AVeCOP PTP GP GFR TubC GFR GKf Matlab/Simulink Grafické zobrazení matematických vztahů")
10
FF=GFR/RPF GFR RPF APr B A RBF AffC TubC RAP GFR=NETP*GKf NETP=GP-PTP-AVeCOP PTP=GFR/TubC PAff=RBF/AffC GP=RAP-PAff ACOP=A*Apr+B*(APr)^2 A*Apr B*(APr)^2 (APr)^2 EPr=APr/(1-FF) (1-FF) EPr^2 A*EPr B*EPr^2 ECOP=A*EPr+B*EPr^2 ACOP+ECOP AVeCOP=(ACOP+ECOP)/2 AVeCOP PTP GP GFR TubC GFR GKf Matlab/Simulink Grafické zobrazení matematických vztahů?
^2 A*Apr B*(APr)^2 (APr)^2 EPr=APr/(1-FF) (1-FF) EPr^2 A*EPr B*EPr^2 ECOP=A*EPr+B*EPr^2 ACOP+ECOP AVeCOP=(ACOP+ECOP)/2 AVeCOP PTP GP GFR TubC GFR GKf Matlab/Simulink Grafické zobrazení matematických vztahů")
11
FF=GFR/RPF GFR RPF APr B A RBF AffC TubC RAP GFR=NETP*GKf NETP=GP-PTP-AVeCOP PTP=GFR/TubC PAff=RBF/AffC GP=RAP-PAff ACOP=A*Apr+B*(APr)^2 A*Apr B*(APr)^2 (APr)^2 EPr=APr/(1-FF) (1-FF) EPr^2 A*EPr B*EPr^2 ECOP=A*EPr+B*EPr^2 ACOP+ECOP AVeCOP=(ACOP+ECOP)/2 AVeCOP PTP GP GFR TubC GFR GKf GFRold-GFRnew Algebraic Constraint Matlab/Simulink Grafické zobrazení matematických vztahů?
^2 A*Apr B*(APr)^2 (APr)^2 EPr=APr/(1-FF) (1-FF) EPr^2 A*EPr B*EPr^2 ECOP=A*EPr+B*EPr^2 ACOP+ECOP AVeCOP=(ACOP+ECOP)/2 AVeCOP PTP GP GFR TubC GFR GKf GFRold-GFRnew Algebraic Constraint Matlab/Simulink Grafické zobrazení matematických vztahů")
12
Matlab/Simulink Grafické zobrazení matematických vztahů? Grafické zobrazení transformace vstupních hodnot na výstupní Ne!

13
Softwarové nástroje pro tvorbu modelů Matlab/Simulink

14
Blokově orientované modelovací nástroje Matlab/Simulink Model v Simulinku vyjadřuje spíše způsob výpočtu než strukturu modelované reality Musíme definovat postup výpočtu

15
Proprietární kód klasických programovacích jazyků (např. Ada, Fortran, C,...) Proprietární kód Definice systému Dekompozice systému Modelování subsystémů Odvození kauzality výpočtu (manuální odvození vstupně/výstupních vztahů) Implementace Simulace Modelování Blokové modelovací jazyky Blokové modelovací jazyky (např. Simulink,...) … … … Vstupy do bloku jsou vnější vstupy nebo výstupy z jiných bloků Výstupy z bloku jsou vnější výstupy nebo vstupy do dalších bloků Modelování a simulace d Zobecněné systémové vlastnosti formalizace
 Proprietární kód Definice systému Dekompozice systému Modelování subsystémů Odvození kauzality výpočtu (manuální odvození vstupně/výstupních vztahů) Implementace Simulace Modelování Blokové modelovací jazyky Blokové modelovací jazyky (např. Simulink,...) … … … Vstupy do bloku jsou vnější vstupy nebo výstupy z jiných bloků Výstupy z bloku jsou vnější výstupy nebo vstupy do dalších bloků Modelování a simulace d Zobecněné systémové vlastnosti formalizace.")
16
Zobecněné systémové vlastnosti F = vR m dP = QR 1 dT = QR 1 dc = QR c Mechanická doména F v Q dP = P 1 -P 2 P1P1 P2P2 Termodynamická doména dT= t° 1 -t° 2 Q Chemická doména Q dc = c 1 -c 2 c1c1 c2c2 Hydraulická doména Elektrická doména R u R = i R R u r = u 1 -u 2 u1u1 u2u2 iRiR Zobecněné úsilí „e“ Zobecněný tok „f“ e=rf Zobecněné úsilí „e“ Zobecněný tok „f“ e=rf

17
Zobecněné systémové vlastnosti Elektrická doména Q=C *u C 1 u C = Q C = i C dt C 1 Mechanická doména pružina F x x=C *F 1 F = x C = v C dt C 1 v - rychlost)Hydraulická doména 1 P = V C = f C dt C 1 V=C *P přítok f c P V Termodynamická doména q=C *dTdT= t° 1 -t° 2 Q - skladované teplo 1 dT = q C = f q dt C 1f q - tepelný tok q fqfq t° 1 t° 2 Zobecněné úsilí „e“ Zobecněný tok „f“ e=1/c * f dt Zobecněné úsilí „e“ Zobecněný tok „f“ e=1/c * f dt
Hydraulická doména 1 P = V C = f C dt C 1 V=C *P přítok f c P V Termodynamická doména q=C *dTdT= t° 1 -t° 2 Q - skladované teplo 1 dT = q C = f q dt C 1f q - tepelný tok q fqfq t° 1 t° 2 Zobecněné úsilí „e Zobecněný tok „f e=1/c * f dt Zobecněné úsilí „e Zobecněný tok „f e=1/c * f dt")
18
e f p q Zobecnělé úsilí (effort) Zobecnělý tok (flow) R e=Rf Zobecnělá akumulace (quantity) C q=Ce Zobecnělá hybnost L p=Lf Zobecněné systémové vlastnosti
 Zobecnělý tok (flow) R e=Rf Zobecnělá akumulace (quantity) C q=Ce Zobecnělá hybnost L p=Lf Zobecněné systémové vlastnosti")
19
e fp q Zobecnělé úsilí (effort) Zobecnělý tok (flow) R e=Rf Zobecnělá akumulace (quantity) C q=Ce Zobecnělá hybnost L p=Lf úsilíhybnosttok akumulace
 Zobecnělý tok (flow) R e=Rf Zobecnělá akumulace (quantity) C q=Ce Zobecnělá hybnost L p=Lf úsilíhybnosttok akumulace")
20
e fp q úsilíhybnosttokakumulace napětíproudnábojindukční tok sílarychlostpolohaimpuls síly momentúhlová rychlost úhelimpuls momentu síly tlakobjemový průtok objemprůtočná hybnost koncentracemolární průtok množství teplotatepelný tokteplo teplotaentropický průtokentropie Obecné systémové vlastnosti

21
e fp q úsilíhybnosttokakumulace napětíproudnábojindukční tok sílarychlostpolohaimpuls síly momentúhlová rychlost úhelimpuls momentu síly tlakobjemový průtok objemprůtočná hybnost koncentracemolární průtok množství teplotatepelný tokteplo teplotaentropický průtokentropie energie Obecné systémové vlastnosti

22
e f p q Zobecnělé úsilí (effort) Zobecnělý tok (flow) R e=Rf Zobecnělá akumulace (quantity) C q=Ce Zobecnělá hybnost L p=Lf energie Obecné systémové vlastnosti
 Zobecnělý tok (flow) R e=Rf Zobecnělá akumulace (quantity) C q=Ce Zobecnělá hybnost L p=Lf energie Obecné systémové vlastnosti")
23
Bond Graphs - Výkonové grafy prvek f (flow) e (effort) Přenos energie prvek f (flow) e (flow) Přenos energie brána
 e (effort) Přenos energie prvek f (flow) e (flow) Přenos energie brána")
24
Bond Graphs - Výkonové grafy Energie do prvku floweffort Energie z prvku floweffort

25
Bond Graphs - Výkonové grafy 1 R:R l:LS r :u s C:C i i i i usus urur ulul ucuc Stejný tok = uzel typu „1“

26
Bond Graphs - Výkonové grafy

27
1 R:R l:LS r :u s C:C i i i i usus urur ulul ucuc Stejný tok =uzeltypu „1“ R usus L C

28
Bond Graphs - Výkonové grafy 0 R:R l:LS r :u s C:C i i i i usus urur ulul ucuc Stejné úsilí = uzel typu „0“, suma toků nulová R usus L C

29
Bond Graphs - Výkonové grafy f (flow) e (effort) Přenos energie e - směr výpočtu f - směr výpočtu prvek f (flow) e (effort) e - směr výpočtu f - směr výpočtu prvek
 e (effort) Přenos energie e - směr výpočtu f - směr výpočtu prvek f (flow) e (effort) e - směr výpočtu f - směr výpočtu prvek")
30
Bond Graphs - Výkonové grafy Přenos energie f e f e f e f e e - směr výpočtu

31
Bond Graphs - Výkonové grafy f e SE Ideální zdroj Zdroj úsilí řízení F SE řízení e f e SF Zdroj toku řízení F -1 SF řízení f

32
Bond Graphs - Výkonové grafy Jednobran typu rezistor f f e R FRFR e e=Rf f e R F -1 R e f f=(1/R)e R Q
e R Q")
33
Bond Graphs - Výkonové grafy Jednobran typu akumulátor (kapacitor) f f e C FCFC e dq/dt q f f e C F -1 C e q
 f f e C FCFC e dq/dt q f f e C F -1 C e q ")
34
Bond Graphs - Výkonové grafy Jednobran typu induktor f f e I e F -1 I p f f e I dq/dt e p FIFI

35
Bond Graphs - Výkonové grafy Jednobran typu induktor f f e I e F -1 I p f f e I dq/dt e p FIFI

36
Transformátory

37
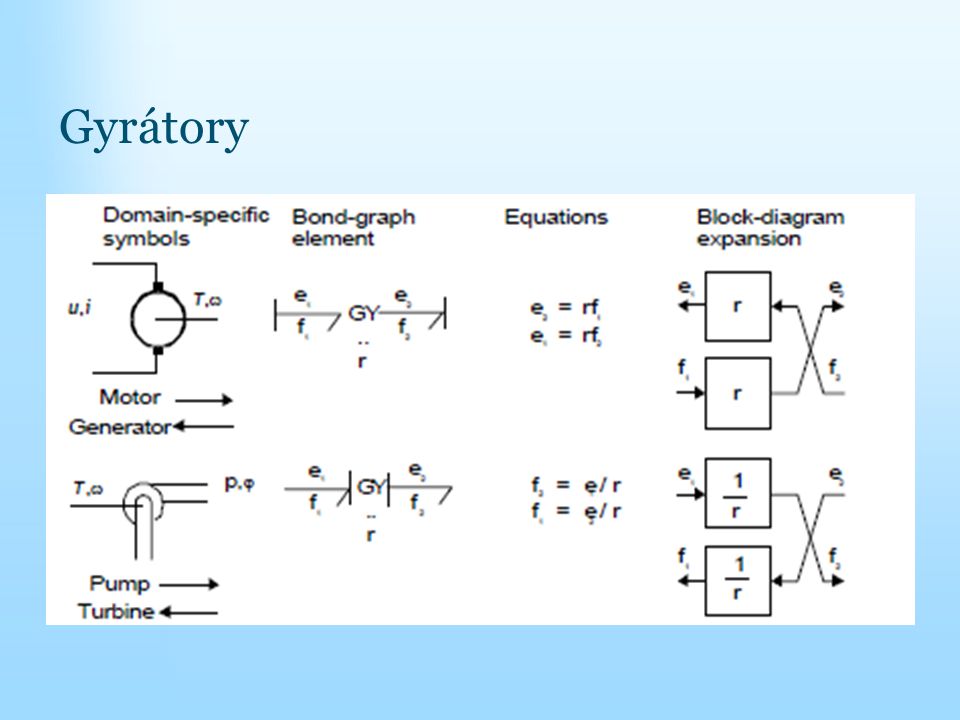
Gyrátory

39
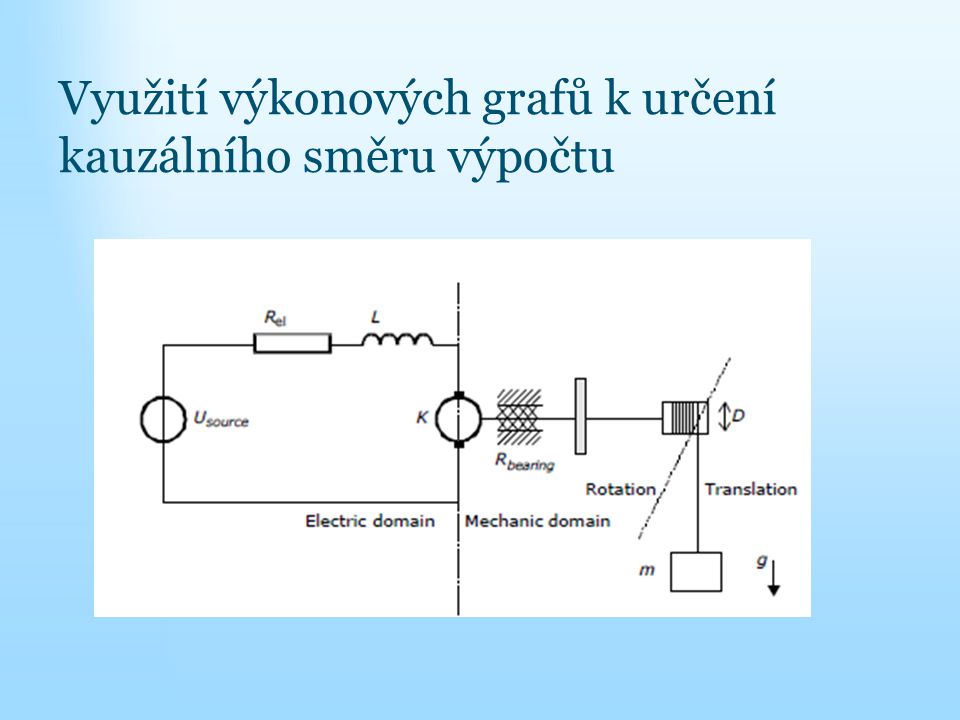
Využití výkonových grafů k určení kauzálního směru výpočtu

41
Podrobnosti v článku „Introduction to Physical System Modeling with Bond Graphs https://cw.felk.cvut.cz/lib/exe/fetch.php/courses/a6m33mos/intro_bondgraphs.pdf Využití výkonových grafů k určení kauzálního směru výpočtu

42
Proprietární kód klasických programovacích jazyků (např. Ada, Fortran, C,...) Proprietární kód Definice systému Dekompozice systému Modelování subsystémů Odvození kauzality výpočtu (manuální odvození vstupně/výstupních vztahů) Implementace Simulace Modelování Blokové modelovací jazyky Blokové modelovací jazyky (např. Simulink,...) … … … Vstupy do bloku jsou vnější vstupy nebo výstupy z jiných bloků Výstupy z bloku jsou vnější výstupy nebo vstupy do dalších bloků Modelování a simulace d Zobecněné systémové vlastnosti formalizace
 Proprietární kód Definice systému Dekompozice systému Modelování subsystémů Odvození kauzality výpočtu (manuální odvození vstupně/výstupních vztahů) Implementace Simulace Modelování Blokové modelovací jazyky Blokové modelovací jazyky (např. Simulink,...) … … … Vstupy do bloku jsou vnější vstupy nebo výstupy z jiných bloků Výstupy z bloku jsou vnější výstupy nebo vstupy do dalších bloků Modelování a simulace d Zobecněné systémové vlastnosti formalizace.")
43
Proprietární kód klasických programovacích jazyků (např. Ada, Fortran, C,...) Proprietární kód Definice systému Dekompozice systému Modelování subsystémů Odvození kauzality výpočtu (manuální odvození vstupně/výstupních vztahů) Implementace Simulace Modelování Blokové modelovací jazyky Blokové modelovací jazyky (např. Simulink,...) … … … Vstupy do bloku jsou vnější vstupy nebo výstupy z jiných bloků Výstupy z bloku jsou vnější výstupy nebo vstupy do dalších bloků Modelování a simulace Zobecněné systémové vlastnosti formalizace Modelica
 Proprietární kód Definice systému Dekompozice systému Modelování subsystémů Odvození kauzality výpočtu (manuální odvození vstupně/výstupních vztahů) Implementace Simulace Modelování Blokové modelovací jazyky Blokové modelovací jazyky (např. Simulink,...) … … … Vstupy do bloku jsou vnější vstupy nebo výstupy z jiných bloků Výstupy z bloku jsou vnější výstupy nebo vstupy do dalších bloků Modelování a simulace Zobecněné systémové vlastnosti formalizace Modelica.")
44
Blokové schéma systému S S xsxs x1x2...xmx1x2...xm u u1u1 u2u2 unun...... vstupy y1y1 y2y2 y yryr výstupy...... Stavové proměnné x s

45
Separabilita systému Podmínka separability systému - systém je separabilní, jestliže jeho výstupy zpětně vlivem prostředí neovlivňují podstatně vstupy. Příklad: · termoregulační systém živého organismu - systém můžeme považovat za separabilní, pokud organismus svou tepelnou energií významně neovlivňuje teplotu prostředí, ve kterém se nachází; · S S X u y u1u1 u2u2 unun x1x2...xmx1x2...xm y1y1 y2y2 yryr...... !!! Výstupy nesmí ovlivňovat vstupy pře okolí systému !!!!

46
Základní atributy systému Stav systému - souhrn přesně definovaných podmínek nebo vlastností daného systému, které lze v daném časovém okamžiku rozpoznat. Stavu systému lze v libovolném časovém okamžiku t (z nějakého zvoleného časového intervalu) přiřadit vektor hodnot x(t) , který nazýváme stavovým vektorem, složky x i vektoru x nazýváme stavovými veličinami (proměnnými) a prostor všech možných hodnot stavových veličin nazýváme stavovým prostorem. S S X u y u1u1 u2u2 unun x1x2...xmx1x2...xm y1y1 y2y2 yryr............
 přiřadit vektor hodnot x(t) , který nazýváme stavovým vektorem, složky x i vektoru x nazýváme stavovými veličinami (proměnnými) a prostor všech možných hodnot stavových veličin nazýváme stavovým prostorem. S S X u y u1u1 u2u2 unun x1x2...xmx1x2...xm y1y1 y2y2 yryr")
47
Blokové schéma systému S S xsxs x1x2...xmx1x2...xm u u1u1 u2u2 unun...... vstupy y1y1 y2y2 y yryr výstupy...... Stavové proměnné x s

48
Blokové schéma systému S S xsxs x1x2...xmx1x2...xm u u1u1 u2u2 unun...... vstupy y1y1 y2y2 y yryr výstupy...... Stavové proměnné x s (vnitřní) nestavové proměnné x s xnxn
 nestavové proměnné x s xnxn.")
49
Stavové proměnné Algebrodiferenciální rovnice v Modelice g(x(t), x‘(t), y(t), u(t))=0 h1(x(t), y(t), u(t))=0 x‘(t) = f (x(t), u(t)) y(t)=h2(x(t), u(t))=0 x(t) - dynamické proměnné u(t) - vstupní proměnné y(t) - výstupní proměnné ODE Algebr. Eq. x s (t) x n (t) x(t) stavové proměnné (vzájemně nezávislé) nestavové proměnné (vypočítatelné ze stavových a vstupních proměnných)
 x n (t) x(t) stavové proměnné (vzájemně nezávislé) nestavové proměnné (vypočítatelné ze stavových a vstupních proměnných).")
50
x s (t) x n (t) x(t) stavové proměnné (vzájemně nezávislé) nestavové proměnné (vypočítatelné ze stavových a vstupních proměnných) StateSelect.default - nech to na Modelice, StateSelect.never – nikdy to nebude stavová, vypočítej vždy z ostatních StateSelect.avoid – použij ji jako stavovou, jen když to už jinak nejde StateSelect.prefer - preferuj ji jako stavovou před default StateSelect.alwais – vždy ji ber jako srtavovou Real x (min=0, max = 100, … StateSelect.prefer) Stavové proměnné Algebrodiferenciální rovnice v Modelice
 x n (t) x(t) stavové proměnné (vzájemně nezávislé) nestavové proměnné (vypočítatelné ze stavových a vstupních proměnných) StateSelect.default - nech to na Modelice, StateSelect.never – nikdy to nebude stavová, vypočítej vždy z ostatních StateSelect.avoid – použij ji jako stavovou, jen když to už jinak nejde StateSelect.prefer - preferuj ji jako stavovou před default StateSelect.alwais – vždy ji ber jako srtavovou Real x (min=0, max = 100, … StateSelect.prefer) Stavové proměnné Algebrodiferenciální rovnice v Modelice")
51
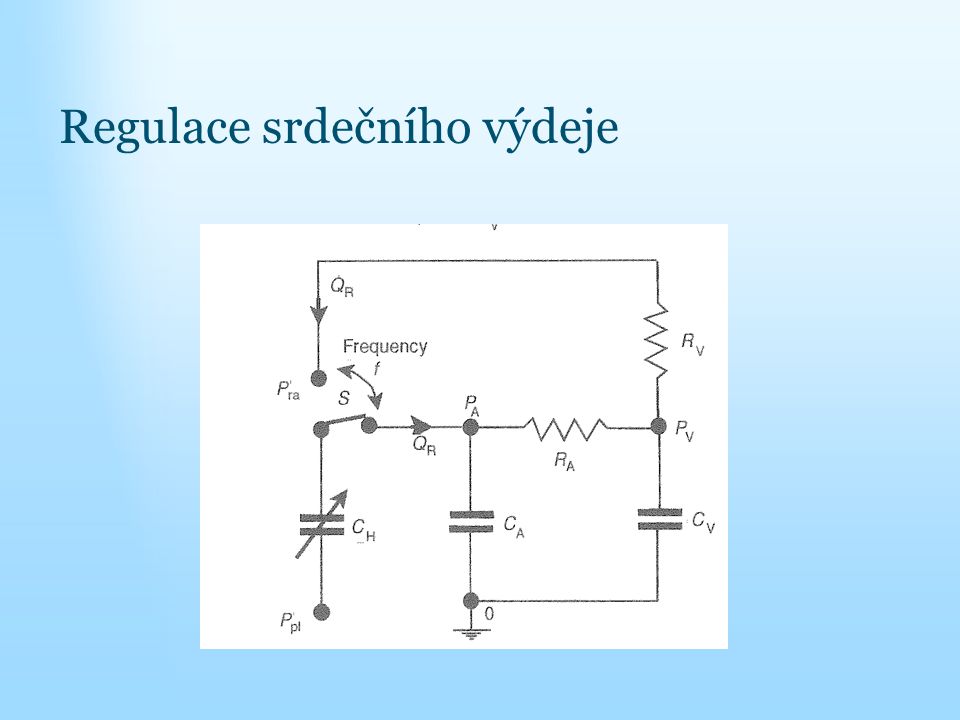
Statická analýzy fyziologických systémů Příklad Regulace srdečního výdeje

53
Na konci diastoly: Na konci systoly: Systolický objem: Minutový objem: Q c >=0

54
Regulace srdečního výdeje Sympaticus - parasympaticus Diastolická dysfunkce

55
Regulace srdečního výdeje Sympaticus - parasympaticus Diastolická dysfunkce Intrapleurální tlak

56
Regulace srdečního výdeje Venózní návrat Mean systemic pressure P ms

57
Regulace srdečního výdeje Venózní návrat Mean systemic pressure P ms C V =18 C A

58
Regulace srdečního výdeje Uzavřená smyčka Sympatikus f Vasodilatace, R A venokonstrikce C V C A Vasodilatace, R A venokonstrikce C V C A cvičení

59
Regulace srdečního výdeje Uzavřená smyčka Sympatikus f Vasodilatace, R A venokonstrikce C V C A Vasodilatace, R A venokonstrikce C V C A cvičení infarkt C S C D V v V A

Podobné prezentace