Dynamika bodu. dynamika hmotného bodu, pohybová rovnice, Základy mechaniky, 12. přednáška Obsah přednášky : dynamika hmotného bodu, pohybová rovnice, d’Alembertův princip, dva druhy úloh v dynamice, zákony o zachování / změně Doba studia : asi 1,5 hodiny Cíl přednášky : seznámit studenty se základními zákonitostmi dynamiky bodu
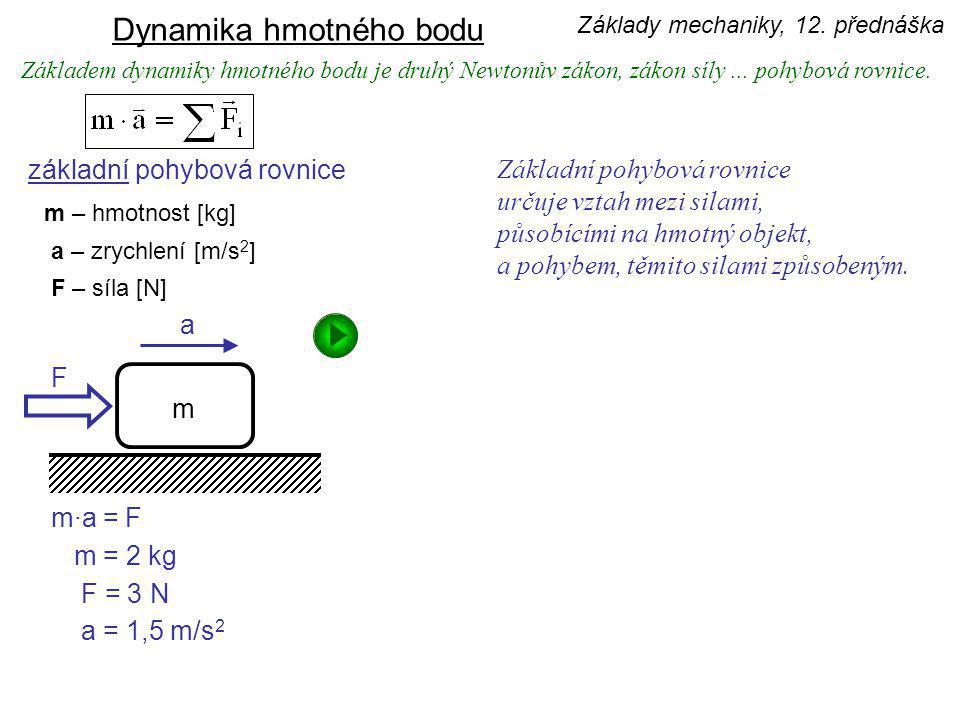
Dynamika hmotného bodu Základy mechaniky, 12. přednáška Základem dynamiky hmotného bodu je druhý Newtonův zákon, zákon síly ... pohybová rovnice. základní pohybová rovnice Základní pohybová rovnice určuje vztah mezi silami, působícími na hmotný objekt, a pohybem, těmito silami způsobeným. m – hmotnost [kg] a – zrychlení [m/s2] F – síla [N] a m F m·a = F m = 2 kg F = 3 N a = 1,5 m/s2
Dynamika hmotného bodu Základy mechaniky, 12. přednáška Základem dynamiky hmotného bodu je druhý Newtonův zákon, zákon síly ... pohybová rovnice. y x a m G F N T f základní pohybová rovnice a G, F - akční síly N - normálová reakce T = f·N - třecí síla Základní pohybová rovnice má na pravé straně všechny působící síly. ax = a Vektorovou rovnici rozložíme na složky dle zvoleného souřadného systému. ay = 0 Vyloučením reakcí získáme tzv. vlastní pohybovou rovnici. vlastní pohybová rovnice vznikne ze základní vyloučením reakcí
Dynamika hmotného bodu Základy mechaniky, 12. přednáška Základem dynamiky hmotného bodu je druhý Newtonův zákon, zákon síly ... pohybová rovnice. Tomuto způsobu sestavení pohybové rovnice, kdy na levé straně rovnice je součin hmotnosti a zrychlení, a ten je na pravé straně roven součtu působících vnějších sil, říkáme přímý, nebo též Newtonův způsob sestavení pohybové rovnice. přímý (Newtonův) způsob sestavení pohybové rovnice a m F m·a = F m = 2 kg F = 3 N a = 1,5 m/s2
Dynamika hmotného bodu Základy mechaniky, 12. přednáška Alternativní způsob sestavení pohybové rovnice nabídnul Jean Le Rond d’Alembert (1717-1783). d’Alembertův princip Součin hmotnosti a zrychlení převedeme na opačnou stranu rovnice. 1. Zavedeme substituci. 2. Takto vzniklá rovnice má formálně charakter rovnice rovnováhy. rovnice rovnováhy a Tomuto postupu říkáme d’Alembertův princip. Můžeme jej rozložit do dvou kroků : 1. Zavedeme tzv. d’Alembertovu sílu. Její velikost je rovna součinu hmotnosti a zrychlení. Její směr je opačný než je směr zrychlení. 2. Silová soustava vnějších sil, doplněná o d’Alembertovu sílu, je v rovnováze. Rovnováhu vyjádříme rovnicemi rovnováhy. Po dosazení D=m·a pak dostáváme pohybovou rovnici. m F D F - D = 0 D = m·a m·a = F
Dynamika hmotného bodu Základy mechaniky, 12. přednáška Alternativní způsob sestavení pohybové rovnice nabídnul Jean Le Rond d’Alembert (1717-1783). Poznámka k filosofii mechaniky. D’Alembertova síla ve skutečnosti neexistuje. Jestliže při jízdě autem šlápneme na brzdu nebo jedeme do zatáčky, zdá se nám, že pociťujeme sílu, která nás tlačí kupředu, resp. do strany. To je právě ona d’Alemberova síla. Ve skutečnosti žádná taková síla neexistuje, jde pouze o subjektivní pocit. Ve skutečnosti se naše tělo „chce“ pohybovat rovnoměrně přímočaře, zatímco přední sklo se na nás „tlačí“ zepředu, resp. dveře auta zboku. Tato skutečnost se nám pouze subjektivně jeví jako by na nás působila d’Alembertova síla. Přestože d’Alembertova síla neexistuje, postup zde uvedený je samozřejmě v plném rozsahu správný. d’Alembertův princip 1. 2. rovnice rovnováhy a m F D F - D = 0 D = m·a m·a = F
Dynamika hmotného bodu Základy mechaniky, 12. přednáška Alternativní způsob sestavení pohybové rovnice nabídnul Jean Le Rond d’Alembert (1717-1783). d’Alembertův princip Oba tyto postupy jsou samozřejmě správné, ale nesmí se navzájem kombinovat ! m·a = F-D 1. přímý (Newtonův) způsob sestavení pohybové rovnice 2. rovnice rovnováhy a a F m F D m m·a = F F - D = 0 D = m·a m = 2 kg m·a = F F = 3 N D - d’Alembertova síla, dynamická síla, doplňková síla, setrvačná síla. Působí proti směru zrychlení, její velikost je rovna součinu hmotnosti a zrychlení. a = 1,5 m/s2
Dynamika hmotného bodu Základy mechaniky, 12. přednáška Alternativní způsob sestavení pohybové rovnice nabídnul Jean Le Rond d’Alembert (1717-1783). y x a m G F N T D d’Alembertův princip 1. f a 2. 1. Proti směru zrychlení zavedeme d’Alembertovu sílu. rovnice rovnováhy 2. Sestavíme rovnice rovnováhy.
Dynamika hmotného bodu Základy mechaniky, 12. přednáška dva druhy úloh v dynamice a m G F f N y x T úloha 1. druhu - kinetostatická úloha 2. druhu - dynamická je dán požadovaný pohyb, zrychlení a je dána síla F vypočtěte sílu F=?, potřebnou k dosažení požadovaného pohybu vypočtěte jak se těleso bude pohybovat a=? rovnice rovnováhy - algebraické rovnice diferenciální
Zákony o změně Úpravy pohybové rovnice nás přivedou Základy mechaniky, 12. přednáška Úpravy pohybové rovnice nás přivedou k definování dalších fyzikálních veličin. Je-li síla konstantní, lze ji z integrálu vytknout a vyjádřit impuls síly jednodušeji : Změna hybnosti znamená změnu velikosti, změnu směru nebo obojí. hybnost hmoty [kg·m·s-1] impuls síly [N·s kg·m·s-1] zákon o změně hybnosti Zde p0 je hybnost na začátku vyšetřovaného děje, p1 je hybnost na konci vyšetřovaného děje.
zákon o změně momentu hybnosti Zákony o změně Základy mechaniky, 12. přednáška moment hybnosti (točivost) [kg·m2·s-1] polohový vektor [m] impuls momentu [N·m·s kg·m2·s-1] moment síly [N·m] zákon o změně momentu hybnosti
zákon o změně kinetické energie Zákony o změně Základy mechaniky, 12. přednáška Úpravy pohybové rovnice nás přivedou k definování dalších fyzikálních veličin. Je-li síla konstantní, lze ji z integrálu vytknout a vyjádřit práci jednodušeji : kinetická energie [J kg·m2·s-2] práce [N·m kg·m2·s-2] zákon o změně kinetické energie Zde EK0 je kinetická energie na začátku vyšetřovaného děje, EK1 je kinetická energie na konci vyšetřovaného děje.
Zákony o změně Základy mechaniky, 12. přednáška práce Práce je skalární součin síly a dráhy, je tedy třeba vzít v úvahu rovněž úhel mezi směrem dráhy a směrem síly : skalární součin K vyjádření práce můžeme přistoupit i jinak. Sílu rozložíme na složky ve směru dráhy (pracovní) a kolmo ke směru dráhy (nepracovní) : pracovní složka síly nepracovní složka síly kladná práce – práce vykonaná práce se nevykonává záporná práce – práce spotřebovaná
Zákony o změně d d Základy mechaniky, 12. přednáška práce [N·m kg·m2·s-2] výkon [N·m·s-1 W] d d
Zákony o změně Základy mechaniky, 12. přednáška potenciální energie Potenciální energie je rovna práci, kterou musíme vykonat, abychom těleso přemístili z jedné polohy do druhé. y 1 2 3 potenciální energie (polohová) Potenciální energie je spojena s polohou tělesa nad povrchem Země. G F=G m G F=G m G F=G m zvolíme si tzv. „hladinu nulové potenciální energie“ K přemístění může dojít po různých trajektoriích - integračních cestách. Obecně platí, že hodnota křivkového integrálu závisí na integrační cestě. V případě pohybu v gravitačním poli práce síly F nezávisí na integrační cestě. Při přemístění po jakékoliv trajektorii je práce síly F vždy stejná. Potenciální energie je rovna této práci. Silové pole, které má tuto vlastnost (práce nezávisí na integrační cestě) nazýváme konzervativní silové pole.
Zákony o změně k = 6,67·10-11 kg-1·m3·s-2 - gravitační konstanta, Základy mechaniky, 12. přednáška potenciální energie Ve skutečnosti tíhová síla G, a tedy ani tažná síla F=G, nejsou konstantní. y k = 6,67·10-11 kg-1·m3·s-2 - gravitační konstanta, M = 5,98·1024 kg - hmotnost Země, R = 6 378 km - poloměr Země, r - vzdálenost od středu Země, y - výška nad povrchem Země. G F=G m Země R na povrchu Země platí : Práci je tedy třeba určit integrálem.
Zákony o změně Základy mechaniky, 12. přednáška potenciální energie F=G m y Země potenciální energie je rovna této práci R potenciální energie (polohová) Pro malou výšku nad Zemí pak přibližně platí : pro h«R
Zákony o změně l - délka nosníku, Základy mechaniky, 12. přednáška potenciální energie Potenciální energie nemusí být spojena vždy jen s polohou hmotného objektu nad povrchem Země. Působíme-li na vetknutý nosník silou F, nosník se prohne o průhyb y. Působiště síly se posune a síla F tedy koná práci. l - délka nosníku, E - modul pružnosti v tahu J - moment setrvačnosti F y F = k·y k - tuhost Pro výpočet práce je však třeba mít na paměti, že síla F=k·y není konstantní. Pro průhyb o první milimetr stačí pouze malá síla F. Na druhý milimetr je již síla F větší. Teprve při úplném prohnutí dosahuje síla F své konečné hodnoty. Práci je tedy třeba určit integrováním : potenciální energie (deformační) Potenciální energie je spojena s deformací poddajného objektu (nosníku).
Celková mechanická energie se zachovává. Základy mechaniky, 12. přednáška zákon o zachování celkové mechanické energie Součet kinetické a potenciální energie je celková mechanická energie. Soustavu, jejíž celková mechanická energie se zachovává, nazýváme konzervativní soustava. m v0 = 0 EK0 = 0 EP0 = m·g·h h v1 ≠ 0 EK1 = ½·m·v12 Celková mechanická energie se zachovává. EP1 = 0 zvolíme si tzv. „hladinu nulové potenciální energie“
Změna celkové mechanické energie je rovna práci nekonzervativních sil. Základy mechaniky, 12. přednáška zákon o změně celkové mechanické energie Soustavu, jejíž celková mechanická energie se mění, nazýváme nekonzervativní soustava. s EP1 = m·g·h EK1 = ½·m·v12 v h m G F T N EP0 = 0 EK0 = ½·m·v02 a EC1 EC0 A Změna celkové mechanické energie je rovna práci nekonzervativních sil. (to jest sil, které nevytvářejí potenciální energii)
Základy mechaniky, 12. přednáška s v h m G F T N a h Způsob výpočtu dynamiky, založený na rozboru celkové mechanické energie, se nazývá energetická bilance.
dynamika hmotného bodu, pohybová rovnice, d’Alembertův princip, Základy mechaniky, 12. přednáška Obsah přednášky : dynamika hmotného bodu, pohybová rovnice, d’Alembertův princip, dva druhy úloh v dynamice, zákony o zachování / změně