Stáhnout prezentaci
Prezentace se nahrává, počkejte prosím

1
(Real-time Optimally Adapting Meshes) Cíl: - implementace nekonečné krajiny za pomocí ROAM, - optimalizace implementace ROAM algoritmu, - provést detailní měření parametrů.
 Cíl: - implementace nekonečné krajiny za pomocí ROAM, - optimalizace implementace ROAM algoritmu, - provést detailní měření parametrů.")
2
12.

3
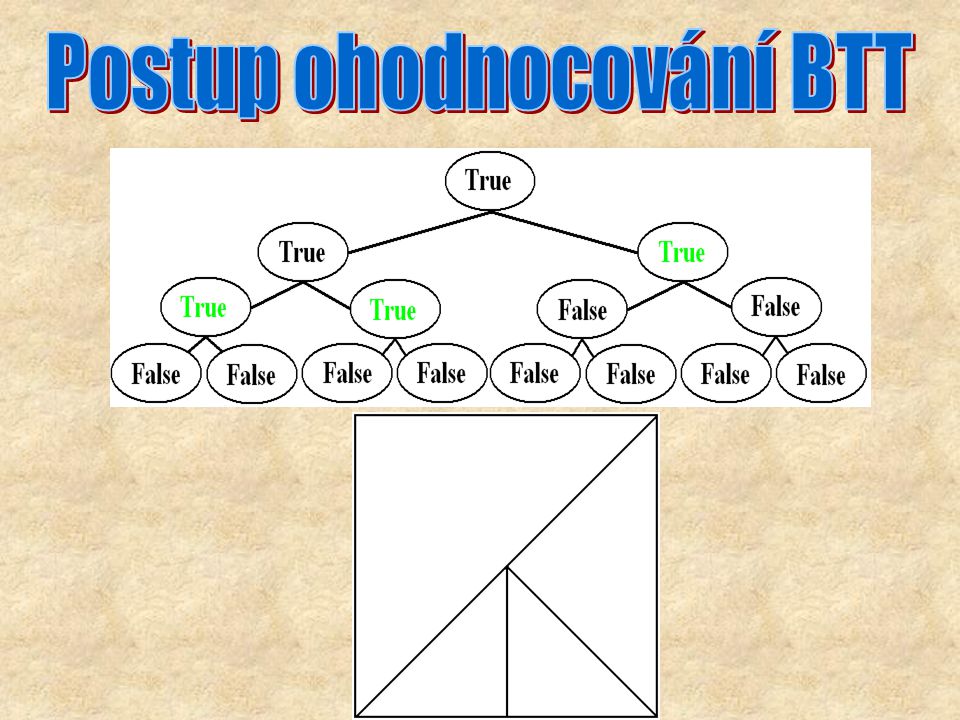
1. Při startu programu (statická): výšková mapa rozdílová mapa binary triangle tree (BTT) 2. Při pohybu v krajině (dynamická):
:.")
5
Teoretický rozbor metod: Čtyř čtverců, Pásková, kombinovaná Chunked-LOD a ROAM, … Implementace metody Čtyř čtverců. Nalezení možností urychlení (optimalizace). Procházení pouze čtvrtiny BTT. Obarvení krajiny. Detailní proměření.
. Procházení pouze čtvrtiny BTT. Obarvení krajiny. Detailní proměření..")
6
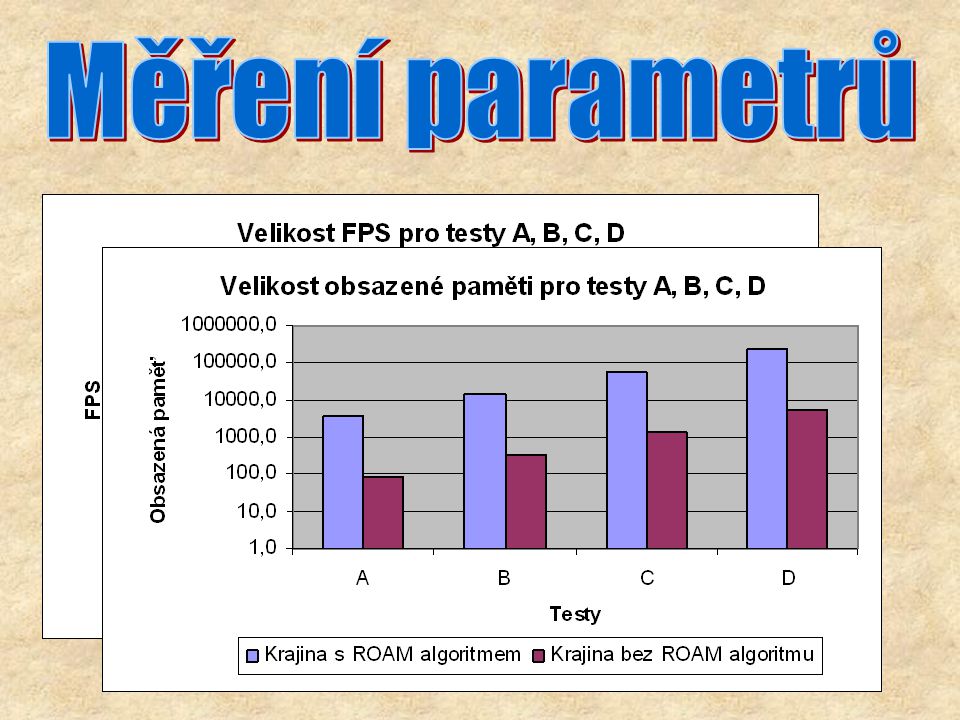
Krajina s ROAM alg. Krajina bez ROAM alg.

7
Test Parametry TERRAIN CONSTNUMCONSTDISTANCEINITIAL PLACE OF CAMERAMOVE DIMENSION HEIGHT DISPLAYDIVISIONINSENSIT- POINT XYZ CAMERA TREEIVITY A 65307011164 1302 B 12950150111128 2582 C 25790230111256 5142 D 512110300111512 10262 Change height of camera E 65307011164 302 Change const display I 65304011164 1302 Change num division tree M 65304041164 1302 Change other parameter Q 1295070113128 2582 R 1295070111128 25810 S 12950701101128 2581

10
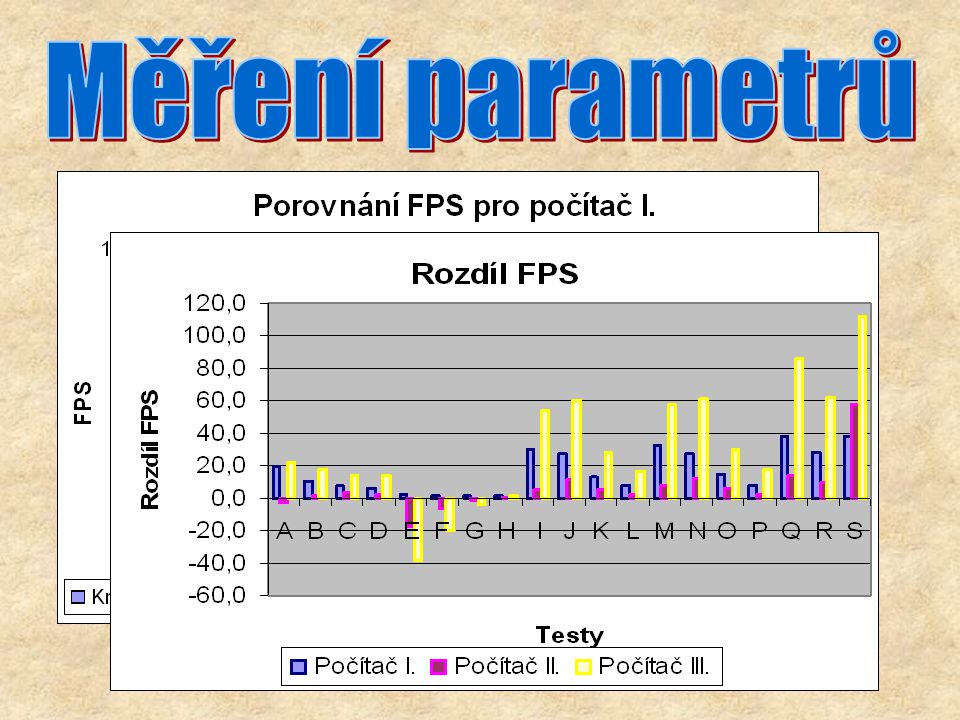
Použitím ROAM algoritmu jsme dosáhli průměrného zrychlení FPS: oPočítač 1.:22,6 (slabá grafická karta, silný procesor) oPočítač 2.:2,8 (silná grafická karta, slabý procesor) oPočítač 3.:7,1 (vyvážené parametry) Důležité nastavení parametrů algoritmu. Velké nároky na paměť.

11
Ohodnocování BTT některou sofistikovanou metodou (například pouze v blízké oblasti hráče). Rozdělení přechodu na nové čtverce mapy do více kroků. Pokusit se navrhnout ROAM algoritmus na nečtvercovou krajinu, případně na libovolný objekt. Řešit problematiku umisťování objektů do krajiny vytvořené pomocí ROAM algoritmu. Spolupráce ROAM algoritmu s jinými algoritmy pro urychlení zobrazování krajiny. Možnosti paralelizace výpočtů na více procesorů.

Podobné prezentace







 Definujte pojem gradient. Vypočítejte gradient funkce.>")






>")




