Stáhnout prezentaci
Prezentace se nahrává, počkejte prosím

1
ÚvodÚvod Předmět klasické mechaniky (dále jen mechaniky) = mechanický pohyb, jeho popis v prostoru a v čase a jeho příčiny. Mechanický pohyb: = změna vzájemné polohy těles v prostoru a v čase. Klasická mechanika: rychlosti těles jsou mnohem menší než rychlost světla ve vakuu c = 3 x 10 8 m/s

2
MECHANIKA Popis v prostoru a čase bez uvažování příčin pohybu a jeho změn Studium příčin pohybu a jeho změn Zvláštní část mechaniky (pohyb nenastává) STATIKA
 STATIKA")
3
1. TŘENÍ Ve statice jsme vazby uvažovali jako útvary s dokonale hladkými styčnými místy a s reakcemi kolmými ke styčným plochám či křivkám. Ve skutečnosti jsou styčná místa vazeb víceméně drsná. Vzniklé reakce jsou obecně odchýlené od normál styčných ploch (křivek). Pasivní odpory se projevují reakcemi, které mají tečné složky. V charakteru těchto tečných složek rozlišujeme 2 případy. 1)Jestliže jde o vzájemný pohyb útvarů, obecně mluvíme o smykovém tření. 2)Relativnímu klidu přísluší tečné reakce.
. Pasivní odpory se projevují reakcemi, které mají tečné složky. V charakteru těchto tečných složek rozlišujeme 2 případy. 1)Jestliže jde o vzájemný pohyb útvarů, obecně mluvíme o smykovém tření. 2)Relativnímu klidu přísluší tečné reakce..")
4
Jiné pasivní odpory: odporové účinky při valení tělesa, při navíjení vláken (lan, řetězů), třecí brzda apod. Tření -často užitečné, bez tření by nebyla možná chůze, rozjezd a brzdění vozidel, přenos energie řemeny - často škodlivé, neboť snižuje výkonnost strojů, pak se mu bráníme tím, že třecí plochy necháme potáhnout vrstvou přilnavé kapaliny (mazadla) a tím tření zmenšujeme, neboť tření pevných látek nahradíme třením kapalinným (menší). Všeobecně platí, že třecí síla (smykové tření) působí ve směru a proti smyslu relativní rychlosti stýkajících se bodů
 a tím tření zmenšujeme, neboť tření pevných látek nahradíme třením kapalinným (menší). Všeobecně platí, že třecí síla (smykové tření) působí ve směru a proti smyslu relativní rychlosti stýkajících se bodů.")
5
1.1. Tření smykové Vznik tečných reakcívysvětlován nerovnostmi styčných ploch. Tření je jev fyzikálně velmi složitý. Závisí: - na materiálu, -na stavu styčných ploch, -na síle, která tyto plochy přitlačuje, -na velikosti ploch, -na teplotě, -jiné poměry jsou za klidu, jiné za pohybu. Těleso nepohybuje→tření brání uvedení tělesa do pohybu -nastává tření v klidu. Těleso se pohybuje→tření se uplatňuje jako síla brzdící pohyb -nastává tření v pohybu

6
V 18. století formuloval fyzik Coulomb 2 empirické zákony o smykovém tření. 1. zákon o smykovém tření za klidu Tření smykové v klidu nemůže přestoupit určitou hodnotu, která je úměrná normálové složce, jíž jsou tělesa k sobě přitlačována. Statický součinitel tření závisí převážně na drsnosti ploch. Tje velikost třecí složky reakce s je součinitel tření za klidu Nje normálová složka reakce na styku obou těles T s NT s N kde

7
2. zákon o smykovém tření za pohybu Tření za pohybu vyvozuje tečnou složku reakce, která je úměrná normálové složce reakce. Kinematický součinitel tření (závisí převážně na drsnosti ploch a nezávisí na rychlosti) s k (platnost vztahu je ověřena výsledky experimentů - viz obrázek) Tje velikost třecí složky reakce k je součinitel tření za pohybu Nje normálová složka reakce na styku obou těles T k NT k N kde T(N)T(N) F(N)F(N) N N skNskN Platí:
 s k (platnost vztahu je ověřena výsledky experimentů - viz obrázek) Tje velikost třecí složky reakce k je součinitel tření za pohybu Nje normálová složka reakce na styku obou těles T k NT k N kde T(N)T(N) F(N)F(N) N N skNskN Platí:.")
9
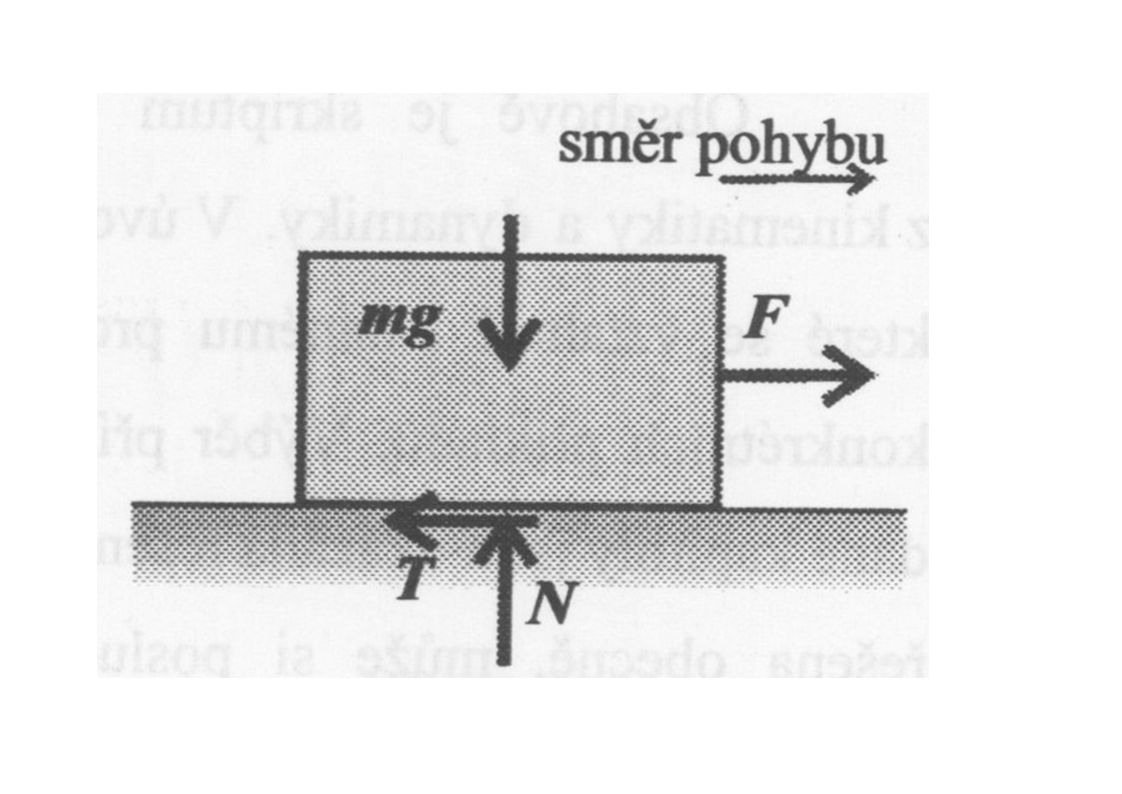
Těleso na vodorovné rovině, na které působí síla F, která svírá s normálou třecí plochy úhel . 1.a) Je-li rovina ideálně hladká, těleso je v rovnováze pouze tehdy, je-li síla F kolmá k rovině ( = 0 ) b) Odkloněním síly F o úhel se dá těleso do pohybu pod účinkem hnací síly F ʹ = F sin . 2.a) Je-li rovina drsná, může vzdorovat nejen silám k nim kolmým, ale i tečným silám až do velikosti T s N Při působení síly F odkloněné o úhel bude těleso tak dlouho v rovnováze, pokud tečná složka síly F ʹ bude menší než maximální hodnota vodorovné reakce T. F F F v 0v 0 Rn NsRn Ns Rt TRsRt TRs
 Je-li rovina ideálně hladká, těleso je v rovnováze pouze tehdy, je-li síla F kolmá k rovině ( = 0 ) b) Odkloněním síly F o úhel se dá těleso do pohybu pod účinkem hnací síly F ʹ = F sin . 2.a) Je-li rovina drsná, může vzdorovat nejen silám k nim kolmým, ale i tečným silám až do velikosti T s N Při působení síly F odkloněné o úhel bude těleso tak dlouho v rovnováze, pokud tečná složka síly F ʹ bude menší než maximální hodnota vodorovné reakce T. F F F v 0v 0 Rn NsRn Ns Rt TRsRt TRs.")
10
Dokud bude úhel menší než úhel s, pro který platí tg s s, kde s je úhel smykového tření v klidu. těleso strvává ve stavu klidu. Úhel s udává krajní polohy vnější síly F, při nichž vazba působí. b) Přestoupí-li úhel hodnotu s, dá se těleso do pohybu. Hnací silou zde bude výslednice vnější síly a reakce vedení F T F sin F cos k V této rovnici je již místo s součinitel k a protože se těleso pohybuje je k s. F F sin s N s F s F cos F sin s F cos tg cos s sinsin
 Přestoupí-li úhel hodnotu s, dá se těleso do pohybu. Hnací silou zde bude výslednice vnější síly a reakce vedení F T F sin F cos k V této rovnici je již místo s součinitel k a protože se těleso pohybuje je k s. F F sin s N s F s F cos F sin s F cos tg cos s sinsin.")
11
úhel k, jehož tg k k k, se nazývá úhel tření za pohybu. Ekvivalence: Protože se jedná o pohyb rovnoměrně zrychlený, jenutnodovýpočtuzahrnoutsetrvačnousílu. Pohybová rovnice tělesa bude m a F T m a F sin k cos Třecí kužel - vyšrafovaná oblast mezi čerchovanými hranicemi vymezenými úhlem s od svislé osy. Pokud paprsek síly leží uvnitř třecího kuželu, je těleso ve stabilní poloze (v klidu). s s F F F Rn NRn N R Rt TRt T m am a kk m a F sin 1 k tg tg tgtg
. s s F F F Rn NRn N R Rt TRt T m am a kk m a F sin 1 k tg tg tgtg .")
12
Pohyb se bude zrychlovat, pokud platí tg k tg tg, klesne-li úhel pod hodnotu k, bude těleso brzděno a časem se zastaví. Nutnou a postačující podmínkou aby těleso na nakloněné rovině bylo ve sta bilní rovnováze, je, aby paprsek výslednice vnějších působících sil (zde tíha) ležel uvnitř tř ecí ho kužele. Materiál ss ss kk kk ocel na ledě0,0271 o 36´0,01448´ ocel na oceli0,11 - 0,36 o 20´ - 16 o 40´0,07 - 0,254o - 14o4o - 14o kov na dřevě0,2 - 0,5511 o 20´ - 29 o 0,2 - 0,511 o 20´ - 26 o 30´ dřevo na dřevě0,43 - 0,6223 o - 32 o 0,19 - 0,4812 o - 25 o
 ležel uvnitř tř ecí ho kužele. Materiál ss ss kk kk ocel na ledě0,0271 o 36´0,01448´ ocel na oceli0,11 - 0,36 o 20´ - 16 o 40´0,07 - 0,254o - 14o4o - 14o kov na dřevě0,2 - 0,5511 o 20´ - 29 o 0,2 - 0,511 o 20´ - 26 o 30´ dřevo na dřevě0,43 - 0,6223 o - 32 o 0,19 - 0,4812 o - 25 o.")
13
Chování tělesa o tíze G nakloníme-li rovinu, na které leží kvádr a) b) G R G R N G cos F G sin bez pohybu, STABILNÍ s s s 0 0 s s bez tření c) d) s s s s G G N G cosN G cos N G cosN G cos F G sinF G sin F G sin R R k k s s bez pohybu, ale pohyb možný, LABILNÍ k k s s POHYB třecí kužel s s
 b) G R G R N G cos F G sin bez pohybu, STABILNÍ s s s 0 0 s s bez tření c) d) s s s s G G N G cosN G cos N G cosN G cos F G sinF G sin F G sin R R k k s s bez pohybu, ale pohyb možný, LABILNÍ k k s s POHYB třecí kužel s s ")
14
1.2. Tření valivé a) dokonale hladká podložkab) tření Dokonale hladká podložka→smýkání Hrubá podložka → smýkání válce po podložce brání tření, podložka kromě svislé reakce působí i silou vodorovnou, která brání posunu dotykového bodu válce. Tento dotykový bod zůstává na místě a válec se kolem něho točí - valí se. G FvFv N G N T FvFv r
 dokonale hladká podložkab) tření Dokonale hladká podložka→smýkání Hrubá podložka → smýkání válce po podložce brání tření, podložka kromě svislé reakce působí i silou vodorovnou, která brání posunu dotykového bodu válce. Tento dotykový bod zůstává na místě a válec se kolem něho točí - valí se. G FvFv N G N T FvFv r .")
15
Moment roztáčející válec má velikost F ⋅ r a velice malá hnací síla F by měla stačit k uvedení válce do pohybu. Ve skutečnosti klade těleso odpor i proti valení. Vysvětlení: Reakce podložky se poněkud posune vpřed proti směru pohybu o jistou délku e (stejně jako u radiálního čepu v nepřiléhajícím ložisku) Váha tělesa vzhledem ke středu otáčení působí brzdícím momentem G ⋅ e. Jev se nazývá tření valivé, délka e je parametr tření valivého (ačkoliv ke tření tu nedochází). Tření valivé je de facto odpor proti valení tělesa. Prakticky: Účinek tření valivého se podobně jako u tření smykového vyjadřuje brzdící silou T, která je násobkem svislého tlaku. G N e r F v T
 Váha tělesa vzhledem ke středu otáčení působí brzdícím momentem G ⋅ e. Jev se nazývá tření valivé, délka e je parametr tření valivého (ačkoliv ke tření tu nedochází). Tření valivé je de facto odpor proti valení tělesa. Prakticky: Účinek tření valivého se podobně jako u tření smykového vyjadřuje brzdící silou T, která je násobkem svislého tlaku. G N e r F v T.")
16
Součtové podmínky rovnováhy momentová podmínka rovnováhy ke středu kde v jekoeficienttřenívalivého,kterýjeznačněmenšínežutření smykového. Zjednodušující předpoklady (Coulomb) -parametr e je nezávislý na poloměru válce a jeho výšce -parametr e je nezávislý na síle, kterou je válec tlačen k podkladu G N e r F v T G - N 0G NG - N 0G N F T 0F TF T 0F T T G vT G v erer T G T G erer T N T N N e T r 0N e T r 0
 -parametr e je nezávislý na poloměru válce a jeho výšce -parametr e je nezávislý na síle, kterou je válec tlačen k podkladu G N e r F v T G - N 0G NG - N 0G N F T 0F TF T 0F T T G vT G v erer T G T G erer T N T N N e T r 0N e T r 0.")
17
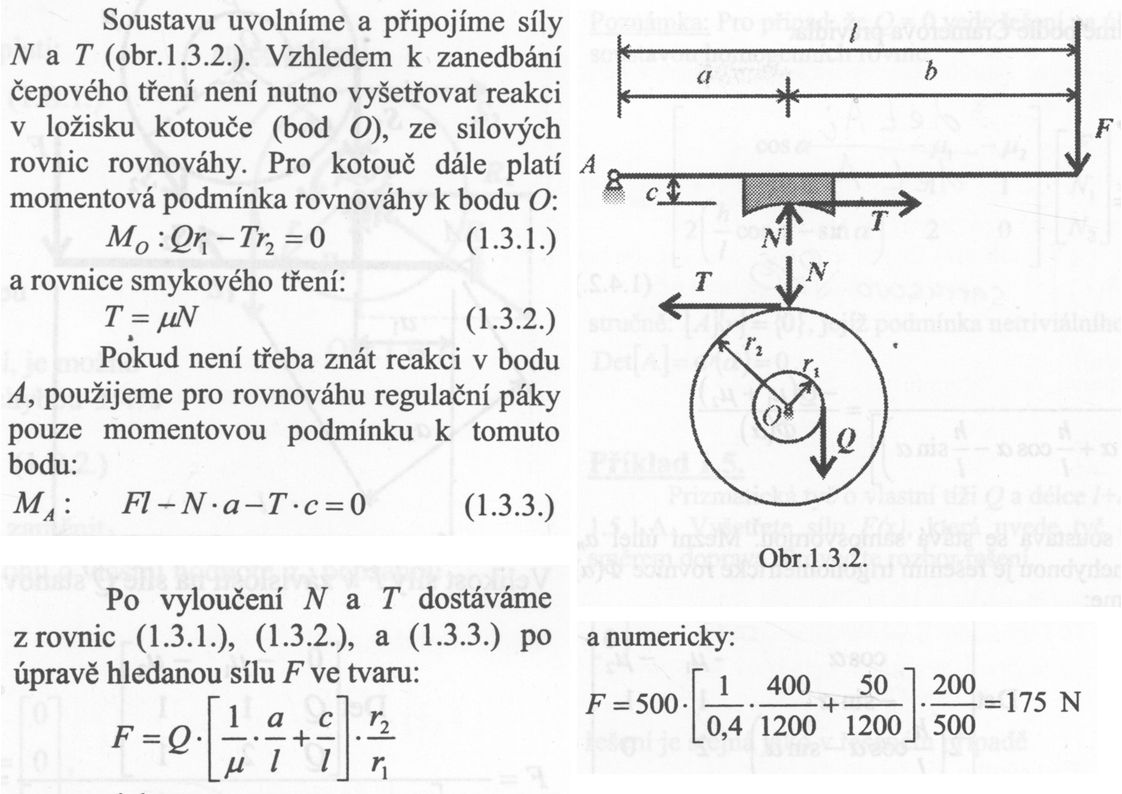
1.3. Tření v čepech Vyšetříme moment potřebný k překonání odporu v čepu 1.3.1. Čep tvaru V Součinitel tření v klidu je charakterizován třecím úhlem s a valivý odpor parametrem valivého tření e.Sklon ramen V čepu je dán úhlem V místě dotyku kruhového průřezu a hran čepu vznikají neznámé reakce R 1, R 2, třetí neznámou je velikost momentu M max. M max G rPrP R1R1 R2R2 e e s s ss p A1A1 A2A2 B 1 B2B2

18
Sestavímesoučtovépodmínky vodorovném a svislém směru: R 1 sin s R 2 sin s 0 rovnováhytuhédeskyvroviněve G R 1 cos s R 2 cos s 0 Řešením obou rovnice dostaneme cos sin s sin s tan tan G sin s G sin s sin s sin s sin sin stan s stan s 11 s s s RR R GR G Výsledky mají smysl, pokud s. Pokud to neplatí, jedná se o úlohu řešícípohybkolananakloněnérovině.Neznámouhodnotumomentu vypočteme z momentové výminky rovnováhy ke středu kruhu. R 1 R 2 e cos s r sin s 0 M maxM max

19
Pokud by byl tento moment překonán, změnil by se třecí úhel statický na kinematický a V čep by kladl odpor vyjádřený momentem M k G e cos k r sin k Dosazením za reakce R 1, R 2 získáme M s G e cos s r sin s

20
1.3.2. Válcový čep Odpor pohybu klade jednak tření valivé a jednak tření smykové. Součet těchto odporů se nazývá tření čepové a pro úhel čepového tření za klidu můžeme přibližně předpokládat s v s v čs Sestavíme podmínky rovnováhy válce v čepu. R n G cos čs 0R t G sin čs 0 a momentová podmínka rovnováhy k ose válce M max R t r 0 Řešením rovnic pak dostaneme R n G cos čs R t G sin čs G r sin čs MmaxMmax Opět při pohybu klade čep odpor vyjádřený momentem M k G e čk

21
3.Axiální a radiální čep hřídele Čepy jsou části hřídelů uložené do ložisek, které umožňují otáčení. Svislé hřídele, zatížené osovou silou způsobenou vahou rotujícího tělesa, mají čepy axiální. Vodorovné hřídele, zatížené převážně kolmo ke své ose, mají čepy radiální. 1.Axiální čep tvaru rotačního komolého kužele zatížený osovou silou, která se rozděluje rovnoměrně na dosedací plochu. Při otáčení hřídele se po sobě posunují plošné elementy čepu a dosedací plochy ložiska, při němž vznikají vodorovné síly tření proti směru pohybu.

22
Ty mají na celém čepu k ose otáčení moment, který toto otáčení brzdí – nazývá se moment čepového tření. Plášť p r 2 r 1 s pro komolý kužel Dosedací plocha čepu 2 2 2 2 r2 r1sinr2 r1sin r2 r1 r1 r2r2 r1 r1 r2 2 A 2sinA 2sin Celková síla kolmá na povrch čepu sinsin N sin QN sin Q N QN Q dx sin ds Prstencový plošný element dA 2 x ds 2 x dx sin

23
Elementární normálová síla r r r r r rr r x dx 2Q 2Q dN N dA Q sin dx 2 x A sin sin sin sin sin sin 2 2121 2 2 1 2 2 Tření působící na plošném elementu bude r rr r x dx 2Qk2Qk dT dN dT dN k sinsin 2 2121 Moment sil tření po celé ploše čepu k jeho ose r rr r sinsin r2 r2r2 r2 2121 3 x2 dx 2Qk r2 r1 x2 dx 2Qk r2 r1 2 2121 3sin3sin 2Qk2Qk r2r2r2r2 11 M x dT M x dT rr č Má-li se těleso otáčet rovnoměrně, musí na ně působit hnací moment této velikosti. V opačném případně se těleso účinkem čepového tření zastaví.

24
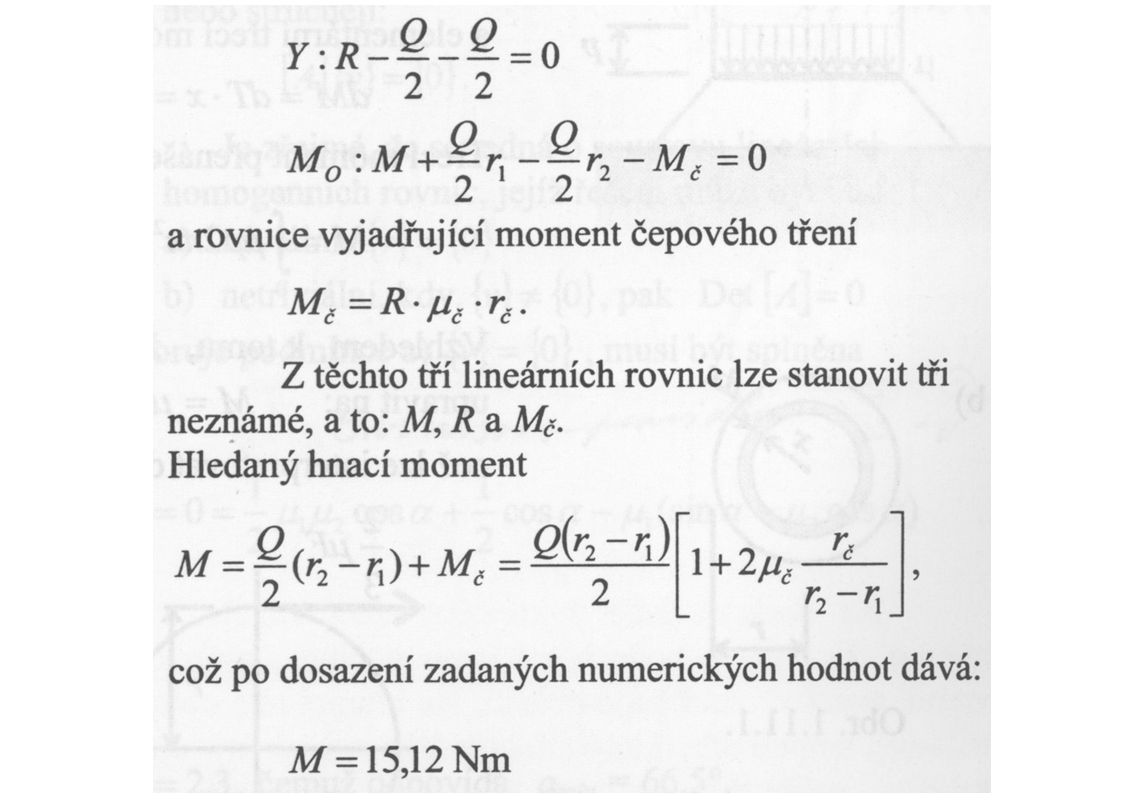
2. Radiální čep zatížený svislou silou Q a uložený v nepřiléhajícím ložisku (průměr čepu je o něco menší než průměr ložiska) Pokud se hřídel neotáčí, bude čep spočívat v nejnižší poloze ložiska A.Reakce R bude svislá v rovnováze se silou Q. Při otáčení hřídele dojde v bodě dotyku ke smýkání ploch ložiska a čepu, vyvodí se tečná složka reakce, který způsobí, že výsledná síla nebude kolmá k ploše ložiska. Protože velikost a směr reakce je dán velikostí a směrem síly Q, posune se působiště síly (dvojice sil) tak, aby výslednice R byla svislá (čep naběhne proti směru otáčení). Za pohybu nejsou síly Q a R v rovnováze, musí působit moment velikosti Q , aby se udržel rovnoměrný chod hřídele.
 Pokud se hřídel neotáčí, bude čep spočívat v nejnižší poloze ložiska A.Reakce R bude svislá v rovnováze se silou Q. Při otáčení hřídele dojde v bodě dotyku ke smýkání ploch ložiska a čepu, vyvodí se tečná složka reakce, který způsobí, že výsledná síla nebude kolmá k ploše ložiska. Protože velikost a směr reakce je dán velikostí a směrem síly Q, posune se působiště síly (dvojice sil) tak, aby výslednice R byla svislá (čep naběhne proti směru otáčení). Za pohybu nejsou síly Q a R v rovnováze, musí působit moment velikosti Q , aby se udržel rovnoměrný chod hřídele..")
25
Tento moment je opět moment čepového tření. Q Rsoučtová výminka T Q sin k k N r sin k M č Q Q r sin k Q r č kde č je koeficient tření čepového 2 1 k1 k č sink č sink kk 3. Radiální čep v těsném ložisku. Reakce ložiska působí po celém obvodě čepu, není však rozdělena rovnoměrně. V každém bodě ložiska bude tato reakce svírat s normálou úhel tření za pohybu k. Elementární reakce budou obalovat kružnici o poloměru r sin k, tzv. třecí kružnice. M č dR musí na otáčející se hřídel působit k překonání tření v čepu

26
Q dR 0Q dR 0 součtová podmínka rovnováhy Protože platí, že integrál z absolutních hodnot je vždy menší než absolutní hodnota integrálu dR dR dR Qpro těsné ložisko pak dR Q, kde bude 1 1 Mč r sink Q Mč č Q rMč r sink Q Mč č Q r resp. Kde č sin k k 1 21 2 k Jestliže na radiální čep bez tření, v klidu, bude působit vnější síla kolmá k jeho ose, nevyvodí otáčení jen v tom případě, bude-li ji protínat (nulový moment k ose). Jakmile bude mít vnější síla k ose čepu nějaký moment, způsobí otáčení. Bez uvažování tření však může síla působit mimo osu hřídele, aniž vyvodí
. Jakmile bude mít vnější síla k ose čepu nějaký moment, způsobí otáčení. Bez uvažování tření však může síla působit mimo osu hřídele, aniž vyvodí.")
27
pohyb (moment působí síly M F M č ), tj. bude-li tato síla protínat třecí kružnici. 1.4. Tření lana přes kruhový válec (vláknové tření) Lano je vedeno přes kruhový válec, mezi lanem a povrchem válce je tření. Hledáme největší možný rozdíl mezi velikostmi sil F 1 a F 2, aby lano dotýkající se kruhového válce v délce určené úhlem (viz obrázek), neproklouzlo. Součinitel smykového tření za klidu mezi materiály lana a válce je s. F2F2 F1F1 r dd F d F d F F RtRt RnRn dd
 Lano je vedeno přes kruhový válec, mezi lanem a povrchem válce je tření. Hledáme největší možný rozdíl mezi velikostmi sil F 1 a F 2, aby lano dotýkající se kruhového válce v délce určené úhlem (viz obrázek), neproklouzlo. Součinitel smykového tření za klidu mezi materiály lana a válce je s. F2F2 F1F1 r dd F d F d F F RtRt RnRn dd.")
28
Ve směru vnější normály kruhového průřezu válce potom sestavíme součtovou podmínky rovnováhy R n F d sin d 0 R n F d d 0 R n F d F d d 0 ( protože pro malý úhel sin d d ). Zanedbáme veličinu druhého řádu a potom R n F d 0 Podobně výminka rovnováhy v místě ve směru tečny má tvar F d cos d F R t 0 F d F R t 0 ( protože pro malý úhel cos d 1 ) Třecí síla R t s R n s F d . Dosazením do předchozí rovnice a úpravou dostaneme F d F F 0F d F F 0 dd s
 Třecí síla R t s R n s F d . Dosazením do předchozí rovnice a úpravou dostaneme F d F F 0F d F F 0 dd s.")
29
což představuje lineární diferenciální rovnici 1. řádu dF F 0. dd s Řešením rovnice získáme sílu F C e s . 1 Integrační konstantu C 1 získáme z okrajové podmínky F 0 F 1, tedy F F esF F es 1 Z vypočteného vztahu lze zodpovědět zadání, že maximální možný rozdíl mezi silami F 1 a F 2 je F F F F F e1 F e1 21 max 1 s.

30
ŘEŠENÉ PŘÍKLADY

31
Příklad 1

33
Příklad 2

35
Příklad 3

38
Příklad 4

40
Příklad 5

42
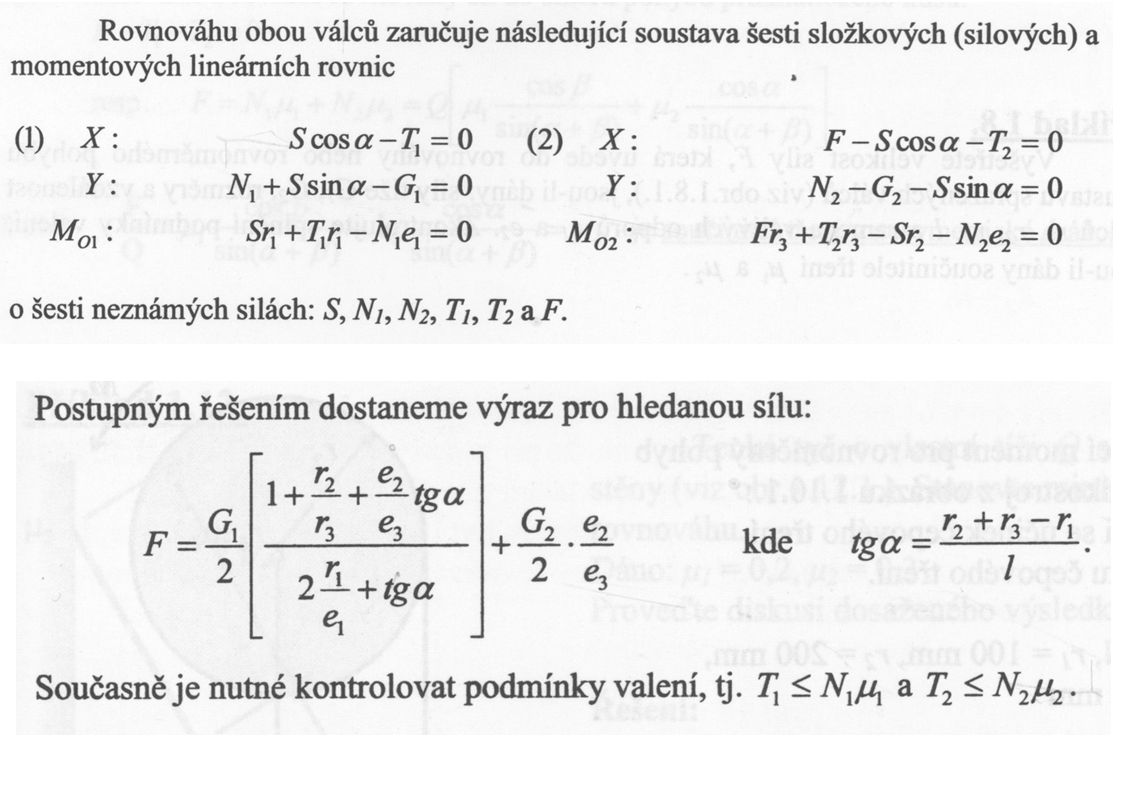
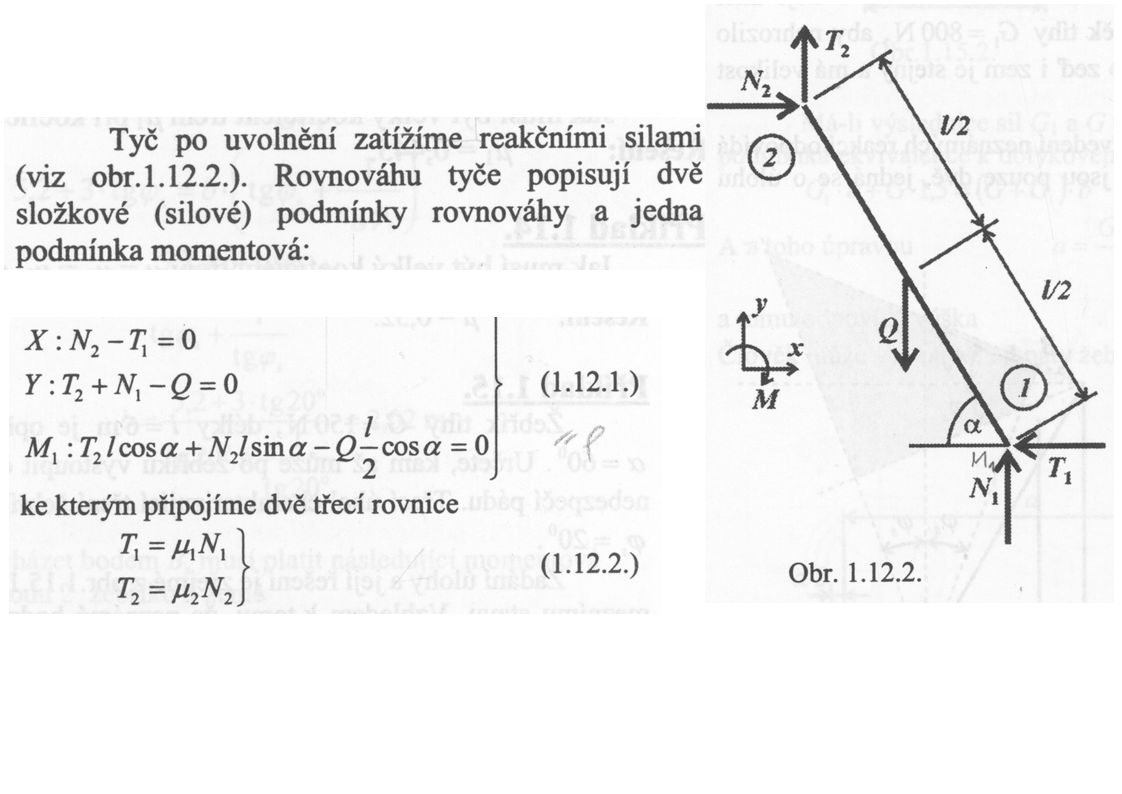
N 2 – μ 1 N 1 = 0 μ 2 N 2 + N 1 – Q = 0 μ 2 N 2 lcosα + N 2 lsinα – Ql/2cosα = 0

Podobné prezentace





, popř. kN ( = 1000 N)>")







.>")






