Stáhnout prezentaci
Prezentace se nahrává, počkejte prosím

1
Mechanika tuhého tělesa

2
Tuhé těleso je ideální těleso, jehož tvar ani objem se
působením libovolně velkých sil nemění Síla působící na tuhé těleso má pouze pohybové účinky

3
Pohyby tuhého tělesa Posuvný pohyb – translace
Při posuvném pohybu je každá přímka spojená s tělesem stále rovnoběžná s původní polohou

4
Pohyby tuhého tělesa Otáčivý pohyb – rotace
Při otáčivém pohybu opisují body tuhého tělesa kružnice, jejichž středy leží na ose otáčení

5
Posuvný a otáčivý pohyb – obr.

6
Otáčivý účinek síly Chceme-li těleso uvést do otáčivého pohybu, musíme na něj působit silou. Otáčivý účinek síly závisí na velikosti síly, směru síly a na poloze jejího působiště

7
Moment síly vzhledem k ose otáčení
vyjadřuje otáčivý účinek síly na těleso značí se M působí-li na těleso síla F ležící v rovině kolmé k ose otáčení vypočte se M jako součin ramene síly d a velikosti síly F M = d . F rameno síly = kolmá vzdálenost d vektorové přímky síly od osy otáčení Jednotka momentu síly je newtonmetr N.m

8
Moment síly vzhledem k ose otáčení
Obr.

9
Moment síly vzhledem k ose otáčení
Otáčivý pohyb proti směru hodinových ručiček = v kladném smyslu. Moment síly má kladné znaménko. Otáčivý pohyb po směru hodinových ručiček = v záporném smyslu. Moment síly má záporné znaménko.

10
Momentová věta Otáčivý účinek několika sil působících na těleso se ruší, je-li vektorový součet jejich momentů vzhledem k téže ose nulový

11
Momentová věta Obr.

12
Skládání sil znamená nahrazení několika sil silou jedinou, která má při působení na těleso stejný pohybový účinek. Síly, které skládáme se nazývají složky Výsledná síla se nazývá výslednice

13
Skládání sil působících na těleso v jednom bodě
Dvě síly působí stejným směrem Dvě síly působí opačným směrem Dvě síly působí různým směrem

14
Dvě síly v jednom bodě stejným směrem
FV = F1 + F2

15
Dvě síly v jednom bodě opačným směrem
FV = F1 - F2

16
Dvě síly v jednom bodě různým směrem
Výslednice je úhlopříčka rovnoběžníku sil

17
Dvě kolmé síly v jednom bodě

18
Skládání sil působících v různých bodech tělesa
Předpokládáme, že se těleso působením síly nedeformuje Působiště každé síly můžeme posunout do libovolného bodu vektorové přímky této síly, aniž by se změnil její pohybový účinek na tuhé těleso

19
Skládání různoběžných sil působících v různých bodech tělesa

20
Skládání různoběžných sil působících v různých bodech tělesa

21
Rozklad sil Rozložit sílu znamená nahradit ji dvěma nebo více silami o stejném pohybovém účinku na těleso V praxi se setkáváme obvykle s 2 případy rozklad na dvě různoběžné síly rozklad na dvě rovnoběžné síly

22
Rozklad sil na nakloněné rovině
Př

23
Těleso zavěšené na laně
Příklad - lanovka – síly působící na vrcholy stožárů jsou větší než tíha lanovky

25
Rozklad tíhy tělesa na vodorovné tyči
Síly F1 a F2 působí na koncích tyče na ruce dvou nosičů

26
Dvojice sil = dvě stejně velké rovnoběžné síly F1 a F2
opačného směru, které působí v různých bodech tuhého tělesa otáčivého kolem nehybné osy

27
Otáčivý účinek dvojice sil na těleso
Účinek dvojici sil nelze nahradit jednou silou Jejich výslednice je nulová, přesto má dvojice sil otáčivý účinek na těleso. Tento účinek vyjadřuje moment dvojice sil D

28
Moment dvojice sil = součinu ramene dvojice sil a jedné síly
d …….. rameno dvojice sil = kolmá vzdálenost vektorových přímek

29
Obecný případ Osa otáčení neleží mezi působišti obou sil,
ale v libovolném bodě tuhého tělesa

30
Moment dvojice sil

31
Otáčivý účinek dvojice sil závisí
na rameni dvojice sil nikoli na poloze osy otáčení

32
Těžiště tuhého tělesa Je působiště výslednice všech tíhových sil
působících na jednotlivé hmotné body tělesa

33
Poloha těžiště tuhého tělesa
Je stálá a závisí na rozložení látky v tělese Těžiště stejnorodých a pravidelných těles leží v jejich geometrickém středu Těžiště nestejnorodých a nepravidelných těles určujeme výpočtem nebo experimentálně Přibližně lze určit polohu těžiště podpíráním nebo zavěšováním (pomocí těžnic –přímka spojující bod závěsu s těžištěm)
")
34
zavěšování podpírání

35
Rovnovážné polohy tělesa
Těleso je v rovnovážné poloze, jestliže je vektorový součet všech sil, které na ně působí, i vektorový součet všech momentů těchto sil rovný nule

36
Stabilní (stálá) rovnovážná poloha
Má ji těleso, které se po vychýlení z této polohy opět do ní vrací Těžiště tělesa je v nejnižší možné poloze Těleso má nejmenší potenciální energii tíhovou

37
Labilní (vratká) rovnovážná poloha
Má ji těleso, které se po vychýlení z této polohy do ní samovolně nevrátí, ale přechází do nové stabilní polohy Těžiště tělesa je v nejvyšší možné poloze Těleso má největší potenciální energii tíhovou

38
Indiferentní (volná) rovnovážná poloha
Má ji těleso, které po vychýlení zůstává v jakékoli nové poloze

39
Stabilita tělesa W = FG .h = m.h.g
Stabilitu tělesa měříme prací, kterou musíme vykonat, abychom těleso uvedli ze stálé rovnovážné polohy do polohy vratké W = FG .h = m.h.g Stabilita těles je tím větší, čím je těleso těžší, čím níže má těžiště a čím větší je vzdálenost svislé těžnice od hrany překlápění

40
Jednoduché stroje Jsou zařízení, která přenášejí sílu a mechanický pohyb z jednoho tělesa na jiné. Mohou přitom měnit směr i velikost síly 2 skupiny: Stroje založené na rovnováze momentů sil – páka, kladka, kolo na hřídeli Stroje založené na rovnováze sil – nakloněná rovina, klín a šroub

41
Páka = pevná tyč, otáčivá kolem osy Páka dvojzvratná
dvě síly působí na různých stranách od osy Páka jednozvratná dvě síly působí na jedné straně od osy

42
Páka Páka dvojzvratná Páka jednozvratná

43
Páka

44
Rovnováha na páce Momenty obou sil jsou stejné

45
Příklady

46
Příklady

47
Kladka Pevná Volná

48
Rovnováha na kladce Pevná kladka Volná kladka

49
Kladkostroj Spojení volných a pevných kladek

50
Kladkostroj

51
Kolo na hřídeli Pracuje jako dvojzvratná páka

52
Příklady

53
Nakloněná rovina

54
Rovnováha na nakloněné rovině

55
Rovnováha na nakloněné rovině

56
Příklad

57
Klín Síla, která působí na podstavu klínu, se
rozloží ve směru kolmém na boční stěny, přitom tyto složky jsou větší než původní síly. Velikost silových složek závisí na úhlu, který svírají boční stěny, čím je tento úhel menší (klín je ostřejší), tím jsou síly větší.
, tím jsou síly větší.")
58
Klín

59
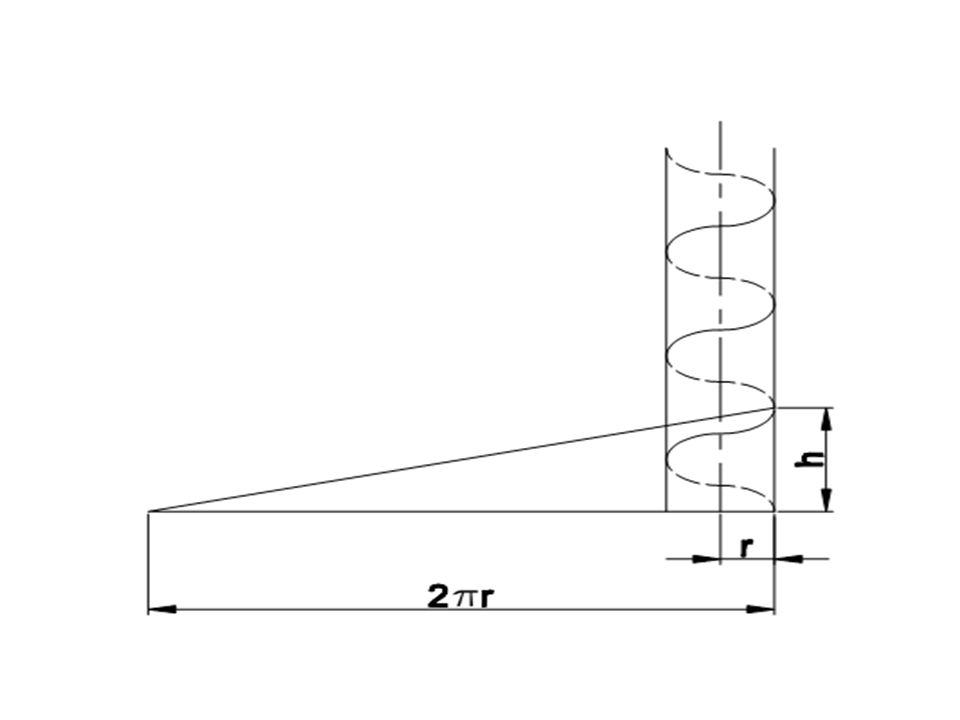
Šroub Síla F1 působí podél závitu o délce
Při jednom otočení šroubu vykoná síla F1 práci Šroub překonává odporovou sílu materiálu F2 a posune se o výšku h Vykonaná práce je

61
Rovnováha sil na šroubu
Práce W1 je rovna práci W2 Rovnováha sil na šroubu

Podobné prezentace


, popř. kN ( = 1000 N)>")

>")















