Katedra řídicí techniky FEL ČVUT1 11. přednáška
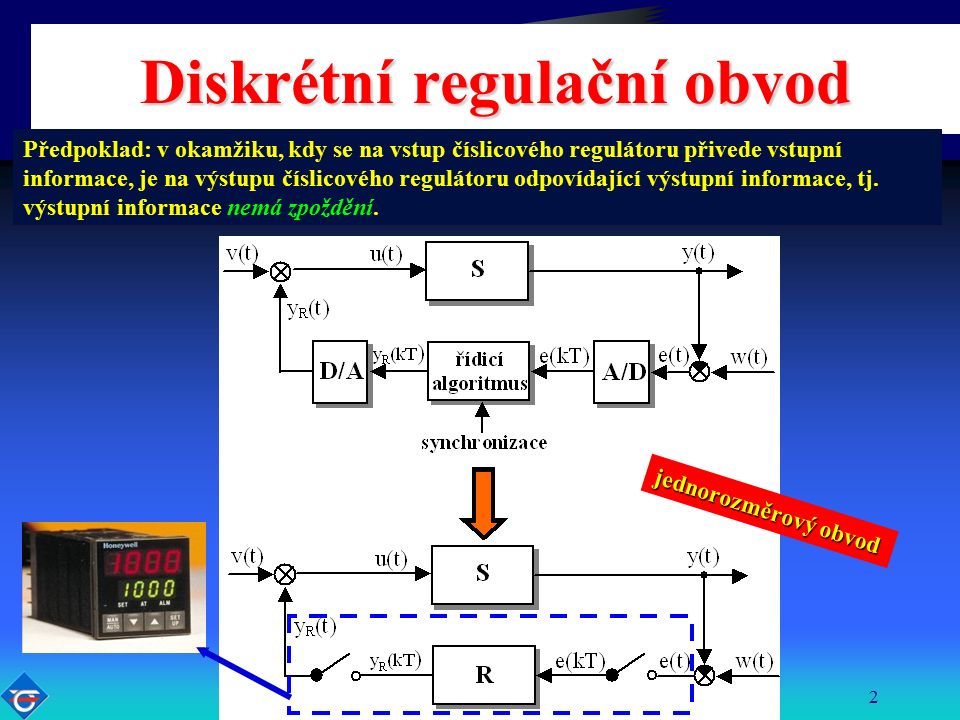
Katedra řídicí techniky FEL ČVUT2 Diskrétní regulační obvod Předpoklad: v okamžiku, kdy se na vstup číslicového regulátoru přivede vstupní informace, je na výstupu číslicového regulátoru odpovídající výstupní informace, tj. výstupní informace nemá zpoždění. jednorozměrový obvod
Katedra řídicí techniky FEL ČVUT3 Kompaktní číslicové regulátory číslicové regulátory display klávesnice y(t) analogový vstup u(t) analogový výstup digitální výstup
Katedra řídicí techniky FEL ČVUT4 Kompaktní regulátory nové generace s vestavěným barevným grafickým displejem a výkonným mikropočítačem pro řízení až osmi smyček PID. Unikátní barevný grafický LCD displej (vícesmyčkové sloupcové grafy, zobrazení průběhů veličin, historie, menu pro podporu obsluhy apod). Podle konfigurace lze regulátor použít pro regulaci jedné nebo více smyček (nespojitých, spojitých PID, vlečných apod.). Řídicí a matematické funkce regulátoru lze naprogramovat výběrem ze 100 funkčních bloků -wafers - tlačítky na panelu regulátoru nebo konfiguračním programem na PC. Regulátory nové generace (Fuji)
Katedra řídicí techniky FEL ČVUT5 Regulační systém RFAN - řízení klimatizačních jednotek Nejjednodušší konfigurace systému obsahuje jednu řídící jednotku, ke které je možno po sběrnici RS 485 připojit až 32 PID regulátorů. PID regulátor komunikací s řídící jednotkou získává požadovanou teplotu a komunikací s externím digitálním čidlem aktuální teplotu místnosti. Svými výstupy pak ovládá ventilátor a okruh topení resp. chlazení v jednotce. Dobrá tepelná pohoda v jednotlivých místnostech je dána algoritmem PID regulace, který umožňuje plynulé řízení topného resp. chladícího výkonu. Teplotu v každé místnosti lze naprogramovat nezávisle na zbytku objektu a to na každý den v týdnu zvlášť. Celý objekt nebo jeho zvolenou část lze přepnout do útlumu a zpět a to buď přímo z řídící jednotky nebo z PC a nebo dálkově pomocí brány GSM či telefonního modemu na pevné lince. Aplikace (vytápění rodinných domů)
Katedra řídicí techniky FEL ČVUT6 Aplikace (lokální řízení v inteligentních budovách)
Katedra řídicí techniky FEL ČVUT7 PSD regulátor Proporcionálně - Sumačně - Diferenční regulátor PID - popis integro-diferenciální rovnicí proporcionální konstanta (zesílení) [s] integrační konstanta [s -1 ] derivační konstanta [s] integrační časová konstanta [s] derivační časová konstanta [s] hodnota integrálu v diskrétním časovém okamžiku t=kT hodnota derivace v diskrétním časovém okamžiku t=kT
Katedra řídicí techniky FEL ČVUT8 … náhrada integrace I(kT) zpětná obdélníková náhrada dopředná obdélníková náhrada lichoběžníková náhrada
Katedra řídicí techniky FEL ČVUT9 … náhrada derivace D(kT) obvykle realizuje zpětnou diferencí 1.řádu:
Katedra řídicí techniky FEL ČVUT10 Polohový algoritmus PSD regulátoru …vychází z náhrady integrálu algoritmu spojitého PID regulátoru zpětnou obdélníkovou metodou a náhrady derivace algoritmu spojitého PID regulátoru zpětnou diferencí 1. řádu při nulových počátečních podmínkách P S D
Katedra řídicí techniky FEL ČVUT11 Přírůstkový algoritmus PSD regulátoru
Katedra řídicí techniky FEL ČVUT12 univerzálně platný rekurentní tvar (stejný pro všechny typy náhrad) zpětná obdélníková náhrada dopředná obdélníková náhrada lichoběžníková náhrada
Katedra řídicí techniky FEL ČVUT13 přenos univerzálního přírůstkového PSD algoritmu
Katedra řídicí techniky FEL ČVUT14 Příklad Převeďte spojitý PID regulátor s přenosem: na diskrétní PSD regulátor s přírůstkovým algoritmem v rekurentním tvaru při vzorkovací periodě T=0,1s.
Katedra řídicí techniky FEL ČVUT15 P regulátor S regulátor diskrétní přechodová charakteristika diferenční rovnice Z - přenos diferenční rovnice Z - přenos diskrétní přechodová charakteristika
Katedra řídicí techniky FEL ČVUT16 PS regulátor PD regulátor diskrétní přechodová charakteristika diferenční rovnice Z - přenos diferenční rovnice Z - přenos diskrétní přechodová charakteristika
Katedra řídicí techniky FEL ČVUT17 PSD regulátor diskrétní přechodová charakteristika diferenční rovnice Z - přenos
Katedra řídicí techniky FEL ČVUT18 Stabilita diskrétního regulačního obvodu řešení diferenciální rovnice vnucená složka regulované veličiny chování regulované veličiny v průběhu přechodového děje Stabilita řešení y(t) je dána vnitřní strukturou systému nikoli charakterem vstupních signálů w(t) resp. v(t). regulační obvod je stabilní pro posouzení stability regulačního obvodu je rozhodující charakteristická rovnice analogie spojitého RO
Katedra řídicí techniky FEL ČVUT19 řešení charakteristické rovnice obecné řešení diferenciální rovnice póly s i, i=1,2,…n mohou být reálné, vícenásobné reálné, komplexně sdružené Nutnou a postačující podmínkou pro stabilitu uzavřeného lineárního regulačního obvodu je, aby všechny kořeny charakteristické rovnice obvodu měly zápornou reálnou část, tj. aby ležely v levé polorovině komplexní roviny !!! řešení diferenční rovnice: chování regulované veličiny v průběhu přechodového děje vnucená složka regulované veličiny
Katedra řídicí techniky FEL ČVUT20 regulační obvod je stabilní obecné řešení charakteristické rovnice
Katedra řídicí techniky FEL ČVUT21 stabilní oblastmez stabilitynestabilní oblast rovina s rovina z oblasti stability spojitých a diskrétních systémů
Katedra řídicí techniky FEL ČVUT22 … zjišťování stability Bilineární transformace: Hurwitzova metoda Routhova metoda Routh – Schurova metoda ….
Katedra řídicí techniky FEL ČVUT23
Katedra řídicí techniky FEL ČVUT24 Přístrojová realizace PID regulátorů Blokové schéma číslicového PID regulátoru
Katedra řídicí techniky FEL ČVUT25
Katedra řídicí techniky FEL ČVUT26