Stáhnout prezentaci
Prezentace se nahrává, počkejte prosím

1
Regulační obvod a pochod

2
Popis chování regulačního obvodu přenosem
Výklad přenosů

3
Regulační pochod probíhá v regulačním obvodu, který vzniká připojením regulátoru k regulované soustavě viz. obrázek Z fyzikálního hlediska je zřejmé, že regulátor pracuje tak, aby zmenšoval, popřípadě úplně odstranil regulační odchylku, tudíž jeho výstupní signál má opačné znaménko než signál vstupní (akční zásah jde proti reg. odporu). Regulátor však ve všech rovnicích i přenosech uvažujeme jako člen s kladným výstupem, protože prakticky mění smysl signálu. Je to dohoda, kdy se změna znaménka přesune do jiného místa regulačního obvodu (na obrázku je v rozdílovém uzlu). Dále se respektuje nepsaná dohoda, že přenos otevřeného regulačního obvodu má rovněž kladný smysl (znaménko), jako v sérii řazené dva kladné členy - regulátor a regulovaná soustava
. Regulátor však ve všech rovnicích i přenosech uvažujeme jako člen s kladným výstupem, protože prakticky mění smysl signálu. Je to dohoda, kdy se změna znaménka přesune do jiného místa regulačního obvodu (na obrázku je v rozdílovém uzlu). Dále se respektuje nepsaná dohoda, že přenos otevřeného regulačního obvodu má rovněž kladný smysl (znaménko), jako v sérii řazené dva kladné členy - regulátor a regulovaná soustava.")
4
Regulační pochod Pro uzavřený regulační obvod (obě dvě přerušení jsou překlenuta - viz předchozí obrázek) za předpokladu, že vstupní signály budou v1(t) = v2(t) = 0 a w(t) = 0 tj., že na obvod nebude působit ani řídící veličina ani poruchy, bude platit e(t) = - y(t) a z toho takže dostáváme GR(s) GS(s) = 0 resp GO (s) = 0 což je tvar charakteristické rovnice k diferenciální rovnici uzavřeného regulačního obvodu bez působení řízení i poruch ve tvaru
 = v2(t) = 0 a w(t) = 0. tj., že na obvod nebude působit ani řídící veličina ani poruchy, bude platit. e(t) = - y(t) a z toho. takže dostáváme 1 + GR(s) GS(s) = 0 resp. 1 + GO (s) = 0. což je tvar charakteristické rovnice k diferenciální rovnici uzavřeného regulačního obvodu. bez působení řízení i poruch ve tvaru.")
5
Regulační obvod uzavřený s W(t) a V(t)
Uvažujeme-li uzavřený regulační obvod u kterého nejsou w(t) a v(t) nulové a pro jednoduchost uvažujeme, že regulační obvod má pouze jednu poruchovou veličinu , tj v2(t) = 0 , v(t) = v1(t) 0 a řídící veličinu w(t) 0 můžeme sestavit rovnice součtového a rozdílového uzlu U(p) = V(p) + UR(p), E(p) = W(p) - Y(p) a rovnice závislostí mezi vstupními a výstupními veličinami bloků UR(p) = GR(p) E(p), Y(p) = GS(p) U(p). Vyloučením všech veličin kromě vstupních a výstupních, obdržíme Laplaceův obraz rovnice uzavřeného regulačního obvodu při působení poruchy a řízení : ze kterého pro podmínku, že v(t) = 0 určíme přenos řízení a pro podmínku, že w(t) = 0 určíme zase přenos poruchy
 a v(t) nulové a. pro jednoduchost uvažujeme, že regulační obvod má pouze jednu poruchovou veličinu , tj. v2(t) = 0 , v(t) = v1(t) 0 a řídící veličinu w(t) 0. můžeme sestavit rovnice součtového a rozdílového uzlu. U(p) = V(p) + UR(p), E(p) = W(p) - Y(p) a rovnice závislostí mezi vstupními a výstupními veličinami bloků. UR(p) = GR(p) E(p), Y(p) = GS(p) U(p). Vyloučením všech veličin kromě vstupních a výstupních, obdržíme. Laplaceův obraz rovnice uzavřeného regulačního obvodu při působení poruchy a řízení : ze kterého pro podmínku, že v(t) = 0 určíme přenos řízení. a pro podmínku, že w(t) = 0 určíme zase přenos poruchy.")
6
Přenos řízení GR(p) = r0 + r1 p Přenos poruchy
Příklad: Vypočítejme přenosy řízení a poruchy pro regulační obvod znázorněný na obrázku a pro zadané přenosy astatické regulované soustavy a PD-reg. GR(p) = r0 + r1 p Stanovme charakteristickou rovnici uzavřeného regulačního obvodu Přenos řízení Přenos poruchy
 = r0 + r1 p. Stanovme charakteristickou rovnici uzavřeného regulačního obvodu. Přenos řízení. Přenos poruchy.")
7
Charakteristický polynom k homogenní lineární diferenciální rovnici s konstantními součiniteli má tvar p4 + 6p3 + 12p2 + (3r1 + 8) p + 3r0 = 0 p4 + a3p3 + a2p2 + a1p + a0 = 0
 p + 3r0 = 0. p4 + a3p3 + a2p2 + a1p + a0 = 0.")
8
Vliv regulátoru na chování regulačního obvodu

9
Stabilita regulačního pochodu
Opakování teorie stability =>

10
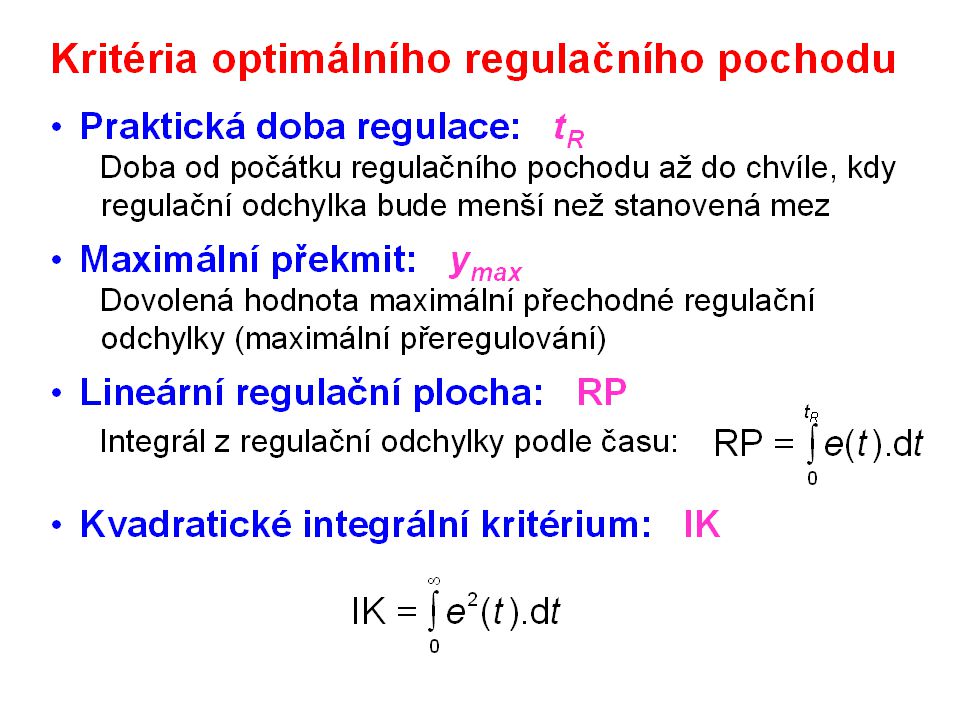
Kvalita regulačního pochodu

13
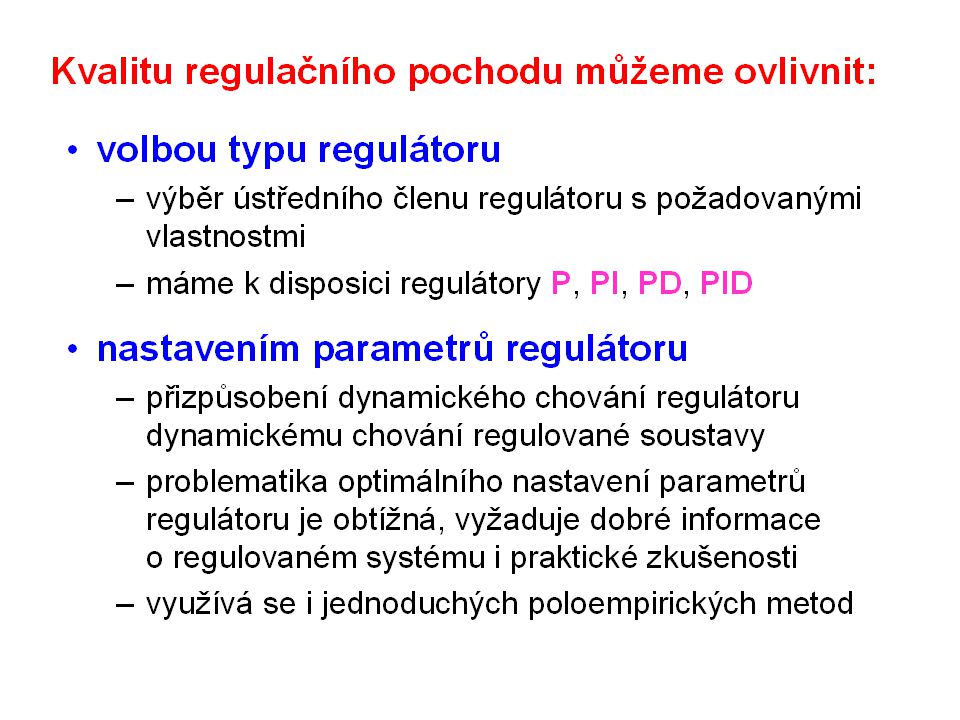
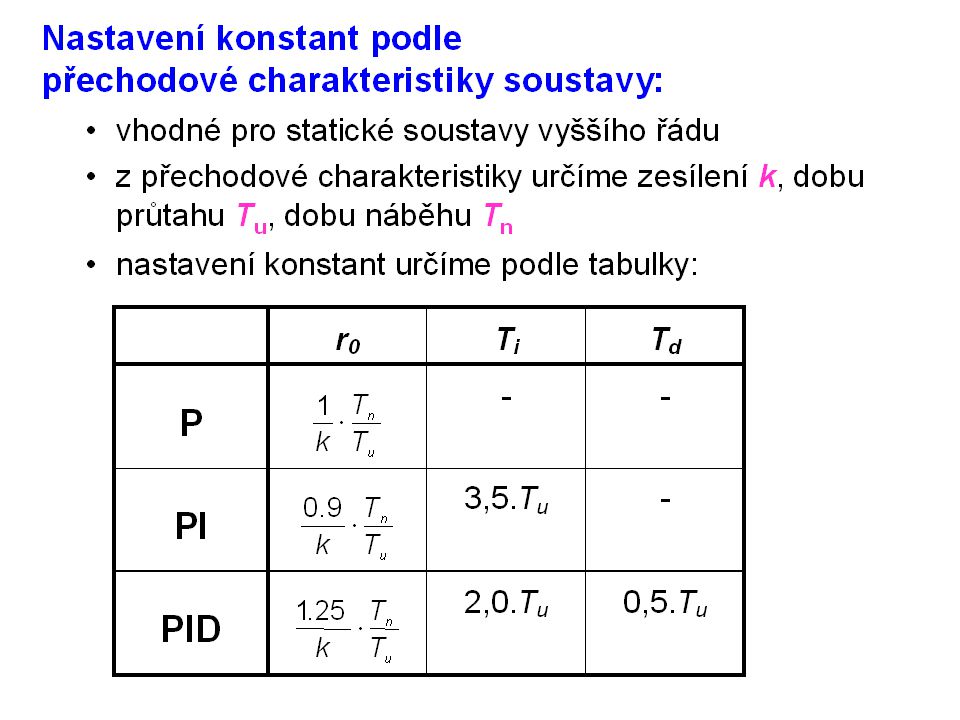
Nastavení konstant regulátoru
Jak na to, když to experimentem nejde

16
Příště technické prostředky automatizace - Senzory
Konec přednášky Děkuji za pozornost Příště technické prostředky automatizace - Senzory

17
Stabilita regulačního obvodu - opakování
Poznámka: zde operátor (p) označen (s), obdobně jako v programu Matlab Přenos řízení Přenos poruchy G0 … přenos otevřeného regulačního obvodu <= Jmenovatel přenosu = 0 …charakteristická rovnice
 označen (s), obdobně jako v programu Matlab. Přenos řízení. Přenos poruchy. G0 … přenos otevřeného regulačního obvodu. <= Jmenovatel přenosu = 0 …charakteristická rovnice.")
18
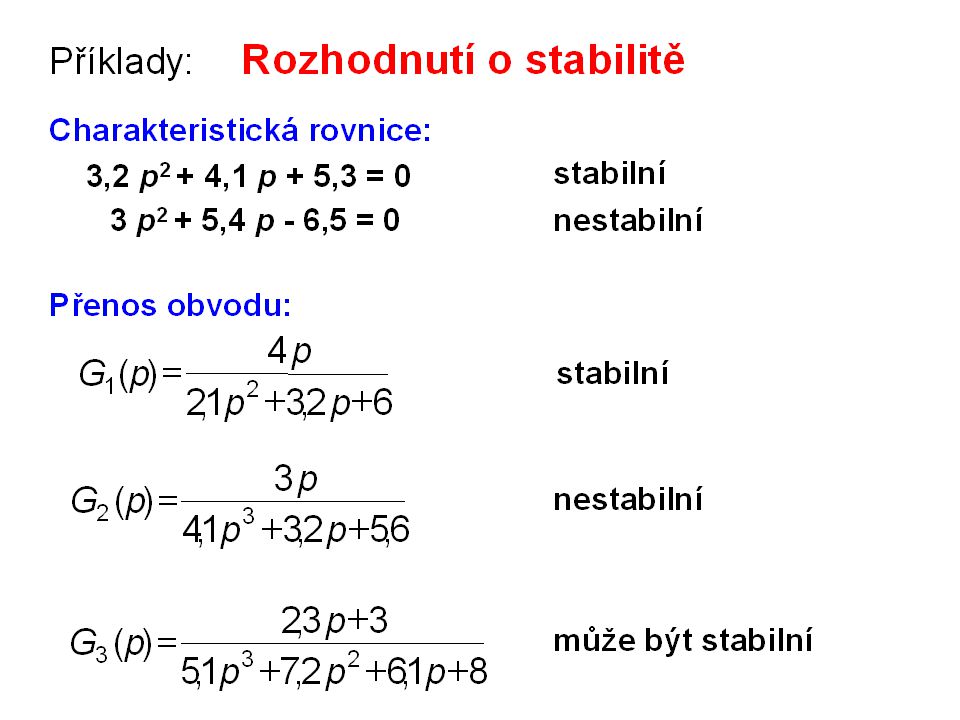
Charakteristická rovnice
Regulační obvod je stabilní, jestliže všechny kořeny s1 , s2 , ….. sn charakteristické rovnice jsou záporná čísla a v případě komplexních kořenů mají tyto kořeny zápornou reálnou část. Praktický postup při sestavení charakteristické rovnice: Přenos rozpojeného regulačního obvodu, který jak víme je součinem přenosu soustavy a přenosu regulátoru, vyjádříme ve tvaru podílu polynomů M(s), N(s) => <= pak , protože zlomek je roven nule když jeho čitatel je roven nule, můžeme charakteristickou rovnici psát jako součet polynomů čitatele a jmenovatele rozpojeného obvodu =>
, N(s) => <= pak. , protože zlomek je roven nule když jeho čitatel je roven nule, můžeme charakteristickou rovnici psát jako součet polynomů čitatele a jmenovatele rozpojeného obvodu. =>")
19
Kritéria stability Hurwitzovo kritérium < =
Vyčíslení kořenů charakteristické rovnice vyššího než druhého stupně je pracná záležitost i s použitím výpočetní techniky. Proto byla sestavena matematická kritéria, která umožňují z charakteristické rovnice určit, zdali jsou její kořeny se zápornou reálnou částí nebo ne, a tím stabilitu obvodu, aniž bychom museli danou rovnici řešit. Hurwitzovo kritérium < =

21
H-determinant --- příklad
Mějme dánu charakteristickou rovnici: Hurwitzův determinant -- determinant n-tého stupně utvořený z koeficientů rovnice Z tohoto determinantu Hn , který je n-tého stupně (n řádků, n sloupců) utvoříme subdeterminanty Hn-1 až H1 tak, že vždy vynecháme poslední řádek a poslední sloupec. Hurwitzovo kritérium: Obvod je stabilní (kořeny charakteristické rovnice jsou záporné nebo mají zápornou reálnou část), když determinant Hn a všechny subdeterminanty Hn-1 až H1 jsou kladné (n je stupeň charakteristické rovnice). Je-li některý z determinantů nulový, je obvod na mezi stability.
 utvoříme subdeterminanty Hn-1 až H1 tak, že vždy vynecháme poslední řádek a poslední sloupec. Hurwitzovo kritérium: Obvod je stabilní (kořeny charakteristické rovnice jsou záporné nebo mají zápornou reálnou část), když determinant Hn a všechny subdeterminanty Hn-1 až H1 jsou kladné (n je stupeň charakteristické rovnice). Je-li některý z determinantů nulový, je obvod na mezi stability.")
22
Příklad : Určete stabilitu regulačního obvodu podle obrázku
Z něho získáme přenos rozpojeného obvodu : Z přenosu získáme charakteristickou rovnici rozpojeného obvodu podle M(s)+N(s)=0
+N(s)=0.")
23
Nyquistovo kritérium => Konkrétní příklad řešení
frekvenční kritérium, které je založeno na znalosti průběhu frekvenční charakteristiky rozpojeného obvodu => K přenosu rozpojeného obvodu G0(s) sestavíme frekvenční přenos rozpojeného obvodu G0(jω) a známým způsobem sestrojíme frekvenční charakteristiku rozpojeného Konkrétní příklad řešení Kritický bod [-1, 0] leží vlevo od frekvenční charakteristiky G0(jω) a proto je obvod
 sestavíme frekvenční přenos rozpojeného obvodu G0(jω) a známým způsobem sestrojíme frekvenční charakteristiku rozpojeného. Konkrétní příklad řešení. Kritický bod [-1, 0] leží vlevo od frekvenční charakteristiky G0(jω) a proto je obvod.")
24
Přenos zpětnovazebního regulačního obvodu
Při zkoumání blokových schémat zjistíme, že existují tři základní zapojení: sériové, paralelní a antiparalelní (neboli zpětnovazební). Antiparalelní (zpětnovazební) zapojení je zapojení dvou členů, kdy se výstupní veličina zapojení vede zpět na vstup, kde se odečítá (nebo též přičítá) od vstupního signálu. Pomocné veličiny m a n byly vyeliminovány a výsledek: Při antiparalelním (zpětnovazebním) zapojení je výsledný přenos dán zlomkem, kde v čitateli je tzv. přenos přímé větve a ve jmenovateli jedna plus součin přenosu přímé větve a přenosu zpětné vazby.
. Antiparalelní (zpětnovazební) zapojení je zapojení dvou členů, kdy se výstupní veličina zapojení vede zpět na vstup, kde se odečítá (nebo též přičítá) od vstupního signálu. Pomocné veličiny m a n byly vyeliminovány a výsledek: Při antiparalelním (zpětnovazebním) zapojení je výsledný přenos dán zlomkem, kde v čitateli je tzv. přenos přímé větve a ve jmenovateli jedna plus součin přenosu přímé větve a přenosu zpětné vazby.")
25
Ziegler-Nichols Kritické zesílení r0k: Optimální zesílení:
Seřízení regulátoru metodou Ziegler-Nichols je velmi jednoduché a v praxi používané. Zaručuje dobrý průběh regulačního pochodu, nelze však stoprocentně tvrdit, že je to nastavení optimální. Je to nastavení blízké optimálnímu. Je možné, že při další změně parametrů regulátoru bychom docílili menší ymax a kratší dobu regulace TR. Metoda seřízení Ziegler-Nichols selhává u strukturálně stabilních a strukturálně nestabilních obvodů (při vyřazení integrační a derivační složky), protože tyto obvody se nedají převést do kritického stavu (na mez stability). U strukturálně nestabilních obvodů je seřízení regulátoru samo o sobě nesmysl. Početní řešení: První krok by byl vyřadit integrační a derivační složku, což u P regulátoru nepadá v úvahu. Potom změnou zesílení regulátoru přivedeme obvod na mez stability. Přenos rozpojeného obvodu a charakteristická rovnice jsou: Kritické zesílení r0k: Optimální zesílení:
, protože tyto obvody se nedají převést do kritického stavu (na mez stability). U strukturálně nestabilních obvodů je seřízení regulátoru samo o sobě nesmysl. Početní řešení: První krok by byl vyřadit integrační a derivační složku, což u P regulátoru nepadá v úvahu. Potom změnou zesílení regulátoru přivedeme obvod na mez stability. Přenos rozpojeného obvodu a charakteristická rovnice jsou: Kritické zesílení r0k: Optimální zesílení:")
Podobné prezentace
 ro proportional gain popř. proportional band pb=100%/ ro, Td derivative action,>")










.>")



. BRVKA Známe různé inverzní procesy (i matematické), integrování je inverzní proces k derivování. Definice: I je.>")



![Je dán dvojbran, jehož model máme sestavit. Předpokládejme, že ve zvoleném klidovém pracovním bodě P 0 =[U 1p ; I 1p ; U 2p ; I 2p ] jsou známy jeho diferenciální.](/11/2980547/big_thumb.jpg "Je dán dvojbran, jehož model máme sestavit. Předpokládejme, že ve zvoleném klidovém pracovním bodě P 0 =[U 1p ; I 1p ; U 2p ; I 2p ] jsou známy jeho diferenciální.>")