Stáhnout prezentaci
1
Roboty a manipulátory Řízení robotů
Katedra elektrotechniky a automatizace Technická fakulta, ČZU v Praze Miloslav Linda Michal Růžička Vladislav Bezouška

2
Situace pracoviště

3
Co se rozumí pod pojmem ŘÍZENÍ ROBOTU ?
- Řada funkcí: řídící, obslužné, zobrazovací, kontrolní, paměťové,.. ZPŮSOBY ŘÍZENÍ Ruční a automatické Programové řízení z hlediska činnosti Adaptivní RUČNÍ – Operátor je součástí řetězce: ODMĚŘOVÁNÍ ŘÍZENÍ AKČNÍ ČLEN ROBOT

4
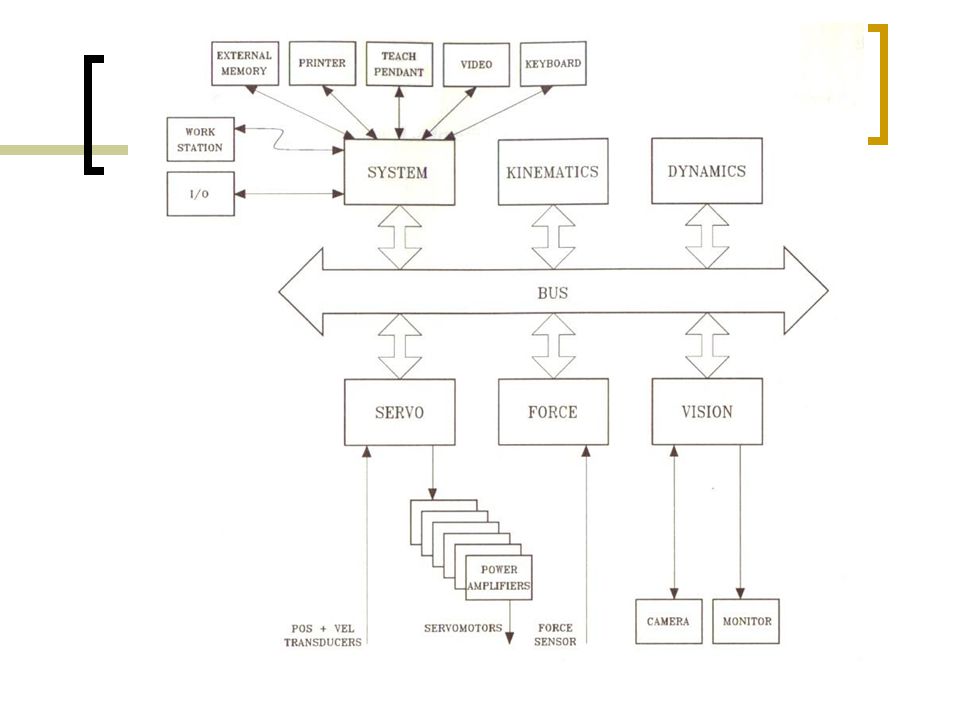
Funkční celky řízení robotu
[Obrázek převzat z literatury č.3]

5
Hydraulický teleoperátor
Technické parametry typu THT - 500: - Nosnost ramene 500 kg - dosah ramene max. 6 m - stacionární, mobilní, závěsný - pohon elektrohydraulický AUTOMATICKÉ – není třeba operátor PROGRAMOVÉ – pracuje podle pevně zadaného programu ADAPTIVNÍ – řídící veličina se mění nepředvídatelně v čase, řízení probíhá výběrem optima Např.: korekce dráhy - min. odchylka programové dráhy od skutečné dráhy (svařování ve švech)
")
6
Spojité řízení (CP) z hlediska řízení pohybu
Adaptivní řízení ON-LINE OFF-LINE Kamerové snímání Taktilní snímač Zkušební ověření dráhy Přepočet dráhy Pracovní úkon na ostro Bod-po-bodu (PTP) Spojité řízení (CP) z hlediska řízení pohybu PTP – pohyb začíná i končí ve všech osách současně - rychlost je omezena osou která má nevětší změnu dráhy (úhlu) - interpolace se provádí pro osy ne pro nástroj - preferuje co nejkratší čas přemístění
 Spojité řízení (CP) z hlediska řízení pohybu. PTP – pohyb začíná i končí ve všech osách současně. - rychlost je omezena osou která má nevětší změnu dráhy (úhlu) - interpolace se provádí pro osy ne pro nástroj. - preferuje co nejkratší čas přemístění.")
7
Příklad: planarní kinematika Řízení PTP Svařování po přímce rovnoběžné
[Obrázek převzat z literatury č.1] Příklad: planarní kinematika Řízení PTP Svařování po přímce rovnoběžné s osou Y – začátek (0,75;0) konec (0,75;0,6) [Obrázek převzat z literatury č.4]
 konec (0,75;0,6) [Obrázek převzat z literatury č.4]")
8
1) Obsluha naklíčuje 7 bodů
2) Obsluha stanoví rychlosti v kloubech robotu r = 2,1mm/s; a = 0,750 /s 3) Nastane pohyb v obou kloubech. Kloub který dosáhne konce jako první se zastaví a počká na pomalejší kloub. [Obrázek převzat z literatury č.4]
 Obsluha stanoví rychlosti v kloubech robotu r = 2,1mm/s; a = 0,750 /s. 3) Nastane pohyb v obou kloubech. Kloub který dosáhne konce jako první se zastaví a počká na pomalejší kloub. [Obrázek převzat z literatury č.4]")
9
Výsledný pohyb [Obrázek převzat z literatury č.4]
![Výsledný pohyb [Obrázek převzat z literatury č.4]](http://slideplayer.cz/slide/2912852/10/images/9/V%C3%BDsledn%C3%BD+pohyb+%5BObr%C3%A1zek+p%C5%99evzat+z+literatury+%C4%8D.4%5D.jpg "Výsledný pohyb [Obrázek převzat z literatury č.4]")
10
CP – Lineární nebo kruhová interpolace vzhledem k nástroji
- spline interpolace - orientace nástroje [Obrázky převzaty z literatury č.1]

11
Dynamické a kinematické řízení
Dynamické – řídící jednotka pracuje s diferenciální rovnicí pohybu Kinematické – řídící veličiny jsou počítána ze zadané dráhy a rychlosti [Obrázek převzat z literatury č.3]

12
Souřadnicový systém - definuje pozici a postavení kinematické struktury definován pro kinematickou strukturu a pracovní prostor

13
Souřadnicový systém definován pro kloubová spojení
definován úhlovými přírůstky

14
Souřadnicový systém - definován osami x, y, z a úhlovými přírůstky w, p, r

15
Souřadnicový systém

16
Pohyb robota Linear – pohyb po přímce mezi dvěma body
Circular – pohyb po kružnici dané třemi body Joint – libovolný pohyb mezi dvěma body

17
Polohový servomechanismus

18
Informační toky při řízení
[Obrázek převzat z literatury č.1]

19
Problémy řízení pohybu
Zaoblení dráhy – časové zpoždění regulačních smyček [Obrázky převzaty z literatury č.1] Zaoblení může být i žádoucí a je uměle dopočítáváno – plynulost pohybu robotu. Nejednoznačnost pozice

20
Situace e-0o – nežádoucí poloha
- 4 a 6 osa jsou souběžně k výsledné pozici, tj. existuje nekonečně mnoho vzájemných poloh pro dosažení výsledné pozice - ŘS obvykle snižuje rychlost [Obrázek převzat z literatury č.1]

21
ŘÍDÍCÍ SYSTÉMY ROBOTŮ MULTIPROCESOROVÝ SYSTÉM PROGRAMOVÁNÍ ŘÍDÍCÍ JED.
I/O LOGIKA TECHNOLOGIE ŘÍZENÍ POH. REGULACE POHONU POHONY

23
Ukázka řízení montáže - - řídící jednotka robotu: napájí motory jednotlivých os; obsahuje SW, řídící ruční panel, operátorský panel, rozhraní

24
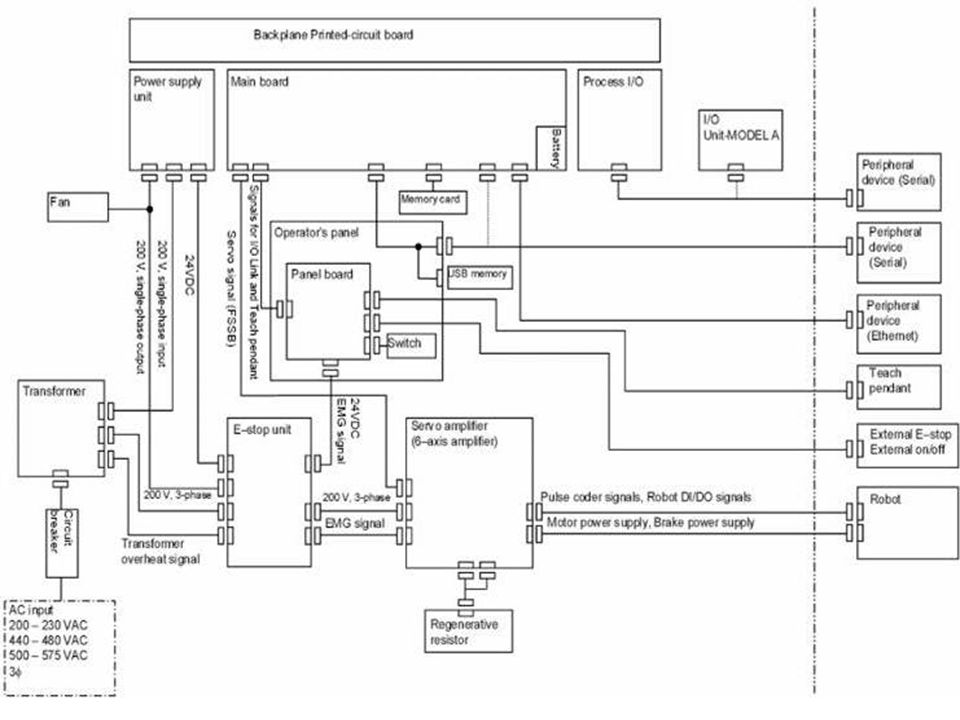
Popis řídícího systému
základní deska - obsahuje mikroprocesor, jeho periferní obvody, paměť a řídicí obvod obslužného panelu; hlavní CPU řídí polohu servo mechanismu tištěný obvod se vstupem/výstupem - pro aplikace zahrnující procesní vstup/výstup se poskytují různé typy tištěných obvodů jednotka nouzového zastavení a jednotka MCC - tato jednotka ovládá systém nouzového zastavení jak elektromagnetického stykače, tak servo zesilovače napájecí jednotka - konvertuje střídavý proud na různé stupně stejnosměrného proudu tištěný obvod zadní propojovací desky - na zadní propojovací desce s tištěnými obvody jsou umístěny různé řídicí tištěné obvody výuková jednotka - veškeré operace zahrnující programování robota se provádějí pomocí této jednotky; stav řízení a jeho data se zobrazují na LCD displeji na jednotce servo zesilovač - řídí servomotor, signál impulsního kódování, ovládání brzdy, přeběh a ohyb ramene obslužný panel - tlačítka a světelné diody na obslužném panelu se používají pro spouštění robota a dále indikují, v jakém se nachází stavu; panel je vybaven portem a USB rozhraním pro sériové rozhraní pro externí zařízení a rozhraním pro připojení paměťové karty pro zálohování dat; ovládá rovněž řídicí obvod nouzového zastavení transformátor - přiváděné napětí konvertuje transformátor na střídavé napětí, které potřebuje řízení jednotka ventilátoru, tepelný výměník - tyto součásti ochlazují vnitřní část řízení jistič - pro případ poruchy elektrického systému rekuperační rezistor - pro eliminaci protisměrného elektromotorického napětí ze servomotoru připojte k servo zesilovači rekuperační rezistor

27
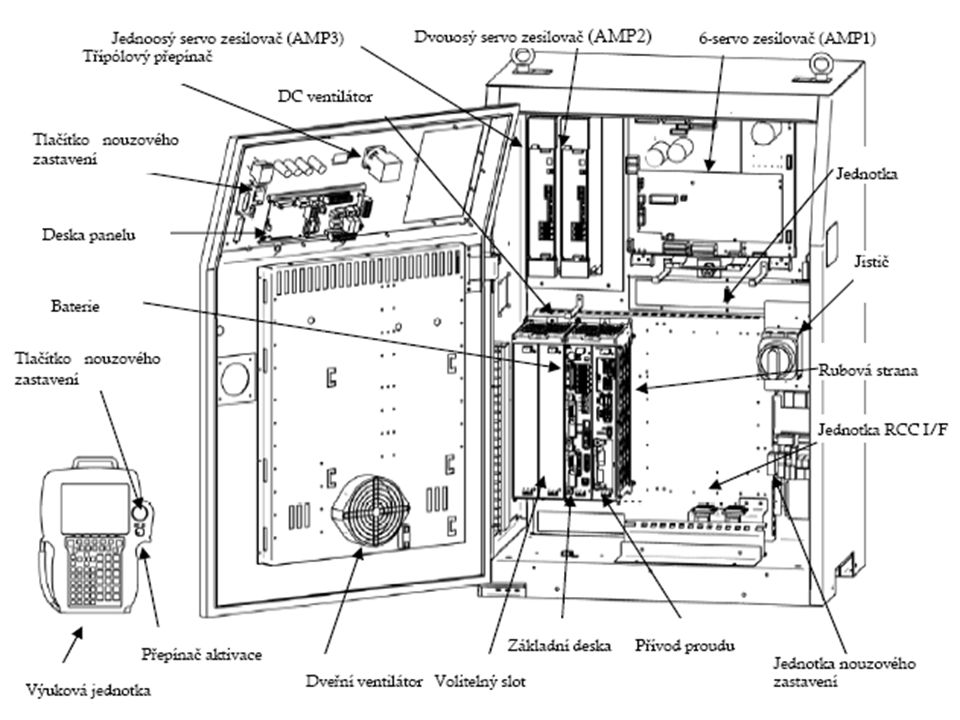
Řídící systém Fanuc - R-J3iC
pohled do skříně obsahující řídící systém

28
Řídící systém Fanuc - R-J3iC
řídící systém obsahující kartu zpracování obrazu připojení kamerového systému

29
Koncepce ŘS TR 4006 ASEA Brown Boveri
PARAMETRY: Max. 6 os Teach-in 20bodu/s lakovny [Obrázek převzat z literatury č.4]

30
Technické uspořádání ŘS SIROTEC ACR 20
[Obrázek převzat z literatury č.4]

31
IRS 711 NUMERIK PARAMETRY: Max. 8 os Inkrement odměř. 160I/96O
[Obrázek převzat z literatury č.4]

32
Instrukce Pohybové: zajišťují pohyb do cílového bodu v rámci operačního prostoru Dodatečné pohybové: zajišťují dodatečné (speciální) polohování Instrukce umisťují data do registrů Instrukce umisťují data o poloze do registrů Vstupně výstupní: posílají či přijímají data z nebo do periferií Čekací: pozdrží vykonání programu do doby splnění podmínky Volací: vyvolávají podprogram Ukončující program Komentáře Ostatní

33
Propojení systémů

34
Senzorické vybavení robotu
Zahrnuje systém pro identifikaci vnějších informací, stavu pracovního prostředí a systémy pro interakci robotu s prostředím Dotykové senzory – pro identifikaci styku s objektem (tenzometrické, pneumatické, mikrospínače atd.) Bezdotykové senzory – pro identifikaci poloh, char. znaků identifikace (indukční, ultrazvukové, laserové atd.)
 Bezdotykové senzory – pro identifikaci poloh, char. znaků identifikace (indukční, ultrazvukové, laserové atd.)")
35
Senzorické vybavení robotu
Senzory pro identifikaci sil a momentů – jsou zpravidla umístěny v pracovní, technologické hlavici robota (pracují např. na principu deformace těles, změn magnetických odporů atd.) akcelerometry, gyroskopy Senzory pro snímání fyzikálních veličin – teplota, vlhkost, průtok, tlak atd.
 akcelerometry, gyroskopy. Senzory pro snímání fyzikálních veličin – teplota, vlhkost, průtok, tlak atd.")
36
Robotizované pracoviště
Je účelové seskupení výrobních zařízení a průmyslového robota, které koná manipulační nebo technologické operace daného výrobního procesu (pracoviště pro odporové svařování)
")
37
Robotizovaný komplex Je soubor dvou nebo více robotizovaných pracovišť a prostředků automatizované mezioperační manipulace, realizující návazné technologické operace

38
Klasifikační znaky průmyslových robotů a manipulátorů
Výrobní obor Druh Manipulační, univerzální, technologický, speciální Kinematika Kartézský, cylindrický, sférický, angulární, SCARA Manipulační hmotnost Do 1 kg, 10 kg, 30 kg, 60 kg, 200 kg, 500 kg, 1000 kg a nad 1000 kg Druh pohonu Elektromechanický, pneumatický, hydraulický, elektrický, kombinovaný

39
Klasifikační znaky průmyslových robotů a manipulátorů
Řízení pohybu Bodové, spojité, bodové a spojité Konstrukční provedení Stojanové, konzolové, portálové, kompaktní Kombinované a modulární

40
Systémy ochran u robotizovaných pracovišť
Důležitá je znalost jednotlivých komponentů pracoviště, realizované technologie, včetně nutného předpokládaného pohybu obsluhy Systémy, které zabraňují vstupu operátora na pracoviště nebo zastavují automatickou činnost Jednoduché zábrany vstupu, plošné zábrany vstupu, zábrany vstupu s blokovací funkcí

41
Mezi bezpečnostní opatření patří
Konstrukční uspořádání ovládacích elementů Použití vhodných vnějších bezpečnostních a ochranných zařízení Použití diagnostického systému za účelem omezení účinků poruch Použití vysoce spolehlivých bezpečnostních obvodů a prvků pro všechny systémy

42
Struktura automatizovaných systémů
Subsystém technologických prostředků Jeho funkcí je změna geometrických, mechanických, fyzikálních, chemických vlastností objektů Výrobní stroje a zařízení, přípravky, nářadí, nástroje Zpracování v systému technologickými operacemi

43
Struktura automatizovaných systémů
Subsystém mezioperační manipulace a skladování Realizace transportu materiálu, polotovarů, výrobků, nástrojů, přípravků, pomocných materiálů, odpadu Jeřáby, podvěsné dopravníky, podlahové dopravníky, transportní vozíky, palety, dopravníky

44
Struktura automatizovaných systémů
Subsystém operační manipulace Realizace automatické manipulace s jednotlivými objekty technologického procesu Průmyslové manipulátory, zařízení pro manipulaci a orientaci objektů, podavače, obraceče, překladače

45
Struktura automatizovaných systémů
Subsystém zdrojů a rozvodu energie Funkcí je zajištění energie, její transformace a rozvod pro jednotlivé subsystémy Rozvod elektrické energie, zdroj a rozvody stačeného vzduchu a tlakové kapaliny

46
Struktura automatizovaných systémů
Subsystém měření a kontroly Funkcí je sledování průběhu činnosti jednotlivých subsystémů a průběhu technologického procesu Snímače, čidla funkčních prvků, aktivní měření průběhů, kvalita technologického procesu

47
Struktura automatizovaných systémů
Subsystém řízení Funkcí je shromažďování, přenos, zpracování informací ve vztahu na zajištění dílčích funkcí Řídicí systémy, řídicí počítače, interface

48
LITERATURA [1] Schmid D. a kol.: Řízení a regulace pro strojírenství a mechatroniku. Europa Sobotáles, Praha, 2005 [2] Talácko J., Matička R.: Konstrukce průmyslových robotů a manipulátorů. ČVUT, 1995 [3] Chvála B., Nedbal J., Dunay G.: Automatizace. SNTL/ALFA, Praha, 1985 [4] Šolc F., Žalud L.: Robotika. VUT. Brno, 2002 [5] Fanuc Robotics Czech s.r.o., Czech Republic: firemní materiály, 2006 [6] Sciavicco, L., Siciliano, B.: Modelling and Control of Robot Manipulators. University of Naples, Italy, 1996, ISBN [7] Spong, M., Hutchinson, S., Vidyasagar, M.: Robot Modelling and Control. 2006, ISBN
![LITERATURA [1] Schmid D. a kol.: Řízení a regulace pro strojírenství a mechatroniku. Europa Sobotáles, Praha,](http://slideplayer.cz/slide/2912852/10/images/48/LITERATURA+%5B1%5D+Schmid+D.+a+kol.%3A+%C5%98%C3%ADzen%C3%AD+a+regulace+pro+stroj%C3%ADrenstv%C3%AD+a+mechatroniku.+Europa+Sobot%C3%A1les%2C+Praha%2C.jpg "[2] Talácko J., Matička R.: Konstrukce průmyslových robotů a manipulátorů. ČVUT, [3] Chvála B., Nedbal J., Dunay G.: Automatizace. SNTL/ALFA, Praha, [4] Šolc F., Žalud L.: Robotika. VUT. Brno, [5] Fanuc Robotics Czech s.r.o., Czech Republic: firemní materiály, [6] Sciavicco, L., Siciliano, B.: Modelling and Control of Robot Manipulators. University of Naples, Italy, 1996, ISBN [7] Spong, M., Hutchinson, S., Vidyasagar, M.: Robot Modelling and Control. 2006, ISBN")




>")





 -menší - měly původně pevně danou konfiguraci integrovaných modulů a byly uzavřeny v jednom pouzdře. -Pouzdro se montuje.>")









.>")