Začínáme s LEGO MindStorms
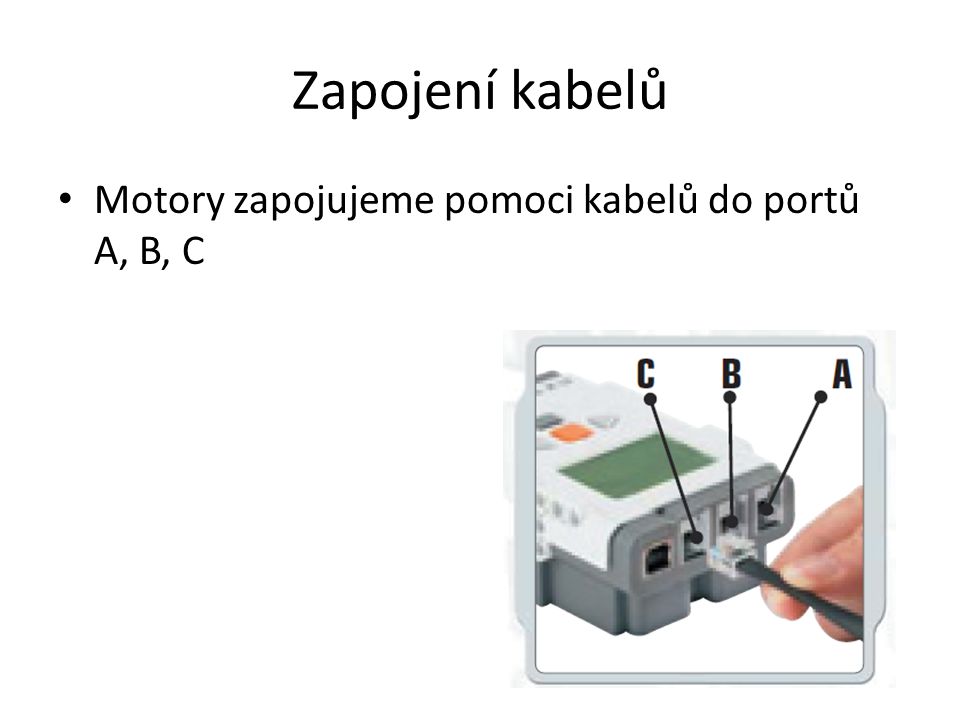
Zapojení kabelů Motory zapojujeme pomoci kabelů do portů A, B, C
Senzory zapojujeme pomoci kabelů do portů 1.-4.
Motory Pohyb robota umožňují tří servomotory.
Pokud pro programování robota použijeme programovací blok Move block (příkaz pro pohyb), dojde k automatické synchronizaci dvou motorů a robot může se pochybovat rovně.
Každý motor má vestavený rotační senzor, což umožňuje přesnější ovládání robota. Rotační senzor měří otáčení motoru ve stupních nebo celkové otáčení (s přesností +/- jeden stupeň). Jedno otočení odpovídá 360 stupňům, takže pokud nastavíte motor na otočení o 180 stupňů, provede jeho hřídel půl otáčky. Jedno otočení je 360°
Délku pohybu zadáme: V otočeních Ve stupních V sekundách
Pohonná jednotka Senzor pohybu Motor Ozubená kola převodovky
Zadání 001. Robot se má pohybovat pomalu 3 sekundy dopředu Rychle 2 sekundu dozadu Otočí se a pojede zpátky 3 otočení motoru
Zadání 002. Pohyb dozadu 5 sekund Zastavit Otočit se doleva o 45° Pohyb dopředu 2 sekundy 1 otáčka doprava Pohyb dopředu 1 sekundu
Zadání 003. Vymyslete vlastní zadání a vyzkoušejte.