Stáhnout prezentaci
1
Název projektu : Modernizace výuky Grantový projekt : CZ. 1. 07/1. 1
Název projektu : Modernizace výuky Grantový projekt : CZ.1.07/1.1.16/ Multimediální učební materiál pro výuku předmětu automatizace Téma : ROBOTIKA Část : Teorie průmyslových robotů Autor : Jan Horňák Střední průmyslová škola a Vyšší odborná škola technická Brno, Sokolská 1

2
Základním rysem technického pokroku je snaha nahrazovat fyzické zapojování člověka do výrobního procesu automatickými systémy. Rozvoj automatizace především ve 2. polovině dvacátého století je podmíněn především nástupem elektroniky, mikroelektroniky a moderní řídící techniky na bázi PC. Ruku v ruce s tím jde rozvoj robotiky. První průmyslový robot byl nasazen do výroby roku Nejvíce jsou roboti nasazováni v automobilovém průmyslu na linkách konečné montáže, dále pak v montáži spotřební elektroniky a na mnoha dalších místech, kde mohou odstranit těžkou, monotónní, nebezpečnou práci člověka nebo tam, kde je zapotřebí dosahovat dlouhodobě přesné výroby . V prostředí nepřátelském a nebezpečném pro člověka je pak nezastupitelné místo robota – to jsou práce pod vodou, v kosmickém prostoru, v radioaktivním prostředí jaderných elektráren a v podzemí, roboty se uplatňují při požárech v hutnictví, v chemickém průmyslu, při odstraňování výbušnin, odminování apod.

3
Robot je autonomně fungující stroj – automat, který je určen k reprodukci některých pohybových a duševních schopností člověka při vykonávání výrobních či jiných činností a operací bez bezprostřední účasti člověka. Hlediska posuzování robota : Manipulační schopnost Počet stupňů volnosti Hmotnost manipulovaného břemena Dosahovaná přesnost Rychlost pohybů Konstrukce robota Způsob a rozsah řízení

4
Manipulátory nazýváme ručně řízená zařízení
Manipulátory nazýváme ručně řízená zařízení. Jednoúčelové manipulátory mají omezenou funkci na několik jednoduchých pohybů a slouží vesměs k automatizaci jednoúčelových strojů a linek hromadné výroby– nazývají se často podavače. Hranice mezi manipulátory a průmyslovými roboty není přesně stanovena, (původní termín manipulátory, používaný pro zařízení řízená ručně nebo automaticky, dospěl vývojem k označení průmyslový robot).
.")
5
Průmyslové roboty jsou univerzálně použitelné automaty pro vykonávání pohybů, které zastávají funkci člověka, především u výrobního stroje. Jsou programovatelné v několika osách a pomocí chapadel, nástrojů a senzorů mohou vykonávat velké množství různých pracovních úkonů. Zabezpečují zejména manipulační operace, ale jsou využitelné i pro technologické operace. Uplatňují se v kusové a velkosériové výrobě. Složitost řídícího systému určuje tzv. generace robotů.

6
Rozdělení průmyslových robotů podle generací :
Roboty první generace jsou řízeny programem bez zpětných vazeb (bez senzoriky - automatické ovládání). Jsou to zařízení určená pro vykonávání pevně naprogramovaných postupných operací
. Jsou to zařízení určená pro vykonávání pevně naprogramovaných postupných operací.")
7
Roboty druhé generace jsou roboty vyšší úrovně, v řídících obvodech jsou vybaveny zpětnými vazbami. Jejich činnost je tedy řízena nejen programem, ale i podněty z vnějšku prostřednictvím senzorů. Jsou snadno a rychle programovatelné.

8
Roboty třetí generace jsou inteligentní roboty
Roboty třetí generace jsou inteligentní roboty. Mají složitý řídící systém pomocí PC, jsou vysoce pohyblivé, zahrnují složitou senzoriku – umí se tedy adaptovat na prostředí. Učí se a samostatně řešit zadané úkoly. Stavebními prvky robotů jsou mimo jiné vizualizace, hlasová komunikace, rozpoznávání a orientace v prostředí. Člověk pouze určuje cíl činnosti robota a postup k dosažení tohoto cíle si robot určuje sám.

9
Kinematika průmyslových robotů 2.1 Kinematické dvojice
Stroj průmyslových robotů tvoří kinematický řetězec. Ten je tvořen jednotlivými kinematickými dvojicemi. Nejčastěji se používají následující kinematické dvojice: Posuvné (translační) Suportové – po delším vedení se posouvá kratší těleso 2.Smykadlové – v kratším vedení se posouvá delší těleso 3.Teleskopické (výsuvné)
 1.Suportové – po delším vedení se posouvá kratší těleso. 2.Smykadlové – v kratším vedení se posouvá delší těleso. 3.Teleskopické (výsuvné)")
10
Rotační kinematické dvojice 1. Otočné 2. Kyvné

11
Kinematické řetězce Vzájemně spojené kinematické dvojice stroje průmyslového robota tvoří kinematický řetězec – kinematickou strukturu průmyslového robota.

12
Souřadnicové systémy průmyslových robotů
Pomocí souřadnicových systémů jsou definovány body v pracovním prostoru. Rozlišujeme absolutní prostorové souřadnice, souřadnice stroje a souřadnice chapadla:

13
Souřadnice prostorové (pravoúhlé, kartézské) Polohy bodů v pracovním prostoru jsou stanoveny pomocí pravotočivého pravoúhlého souřadnicového systému. Vztahují se vždy k počátku souřadného systému (absolutně). Ke 3 pravoúhlým osám X, Y, Z je třeba definovat tzv. orientaci – natočení osy chapadla robota v prostoru vzhledem k těmto osám A, B, C. K najetí na požadovaný bod v prostoru potřebuje chapadlo 6 na sobě nezávislých směrů pohybu – tzv. stupňů volnosti.
. Ke 3 pravoúhlým osám X, Y, Z je třeba definovat tzv. orientaci – natočení osy chapadla robota v prostoru vzhledem k těmto osám A, B, C. K najetí na požadovaný bod v prostoru potřebuje chapadlo 6 na sobě nezávislých směrů pohybu – tzv. stupňů volnosti.")
15
Souřadnice stroje V případě průmyslových robotů s kloubovými rameny lze určit polohu jednotlivých os uvedením úhlu natočení ramen (α, β, γ, atd.). Jsou to souřadnice vztažené ke stroji, které mohou být řídícím systémem přepočítány na pravoúhlé prostorové souřadnice.
. Jsou to souřadnice vztažené ke stroji, které mohou být řídícím systémem přepočítány na pravoúhlé prostorové souřadnice.")
17
Souřadný systém, vztažený k chapadlu
Souřadný systém, vztažený k chapadlu. Počátek souřadnicových os je umístěn do středu chapadla. Kladný směr osy Z směřuje od chapadla směrem k součástce – hlavní pracovní směr.

19
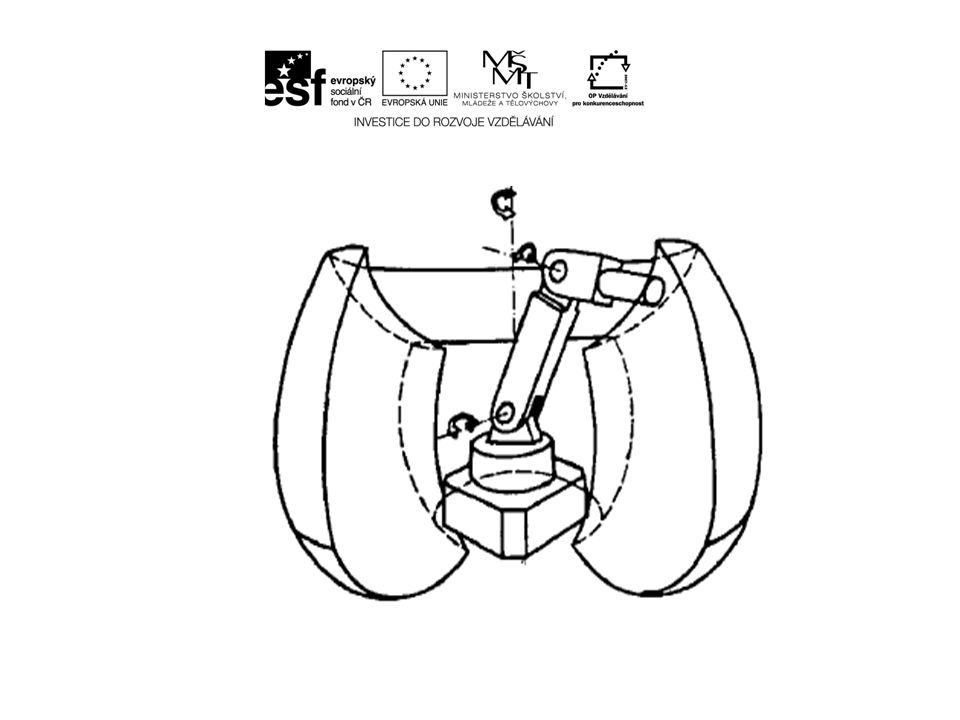
Části průmyslového robota
Hlavní součásti stroje průmyslového robota : Stojan (pevný nebo mobilní) Ramena Zápěstí Hlavice (nebo chapadlo)
 Ramena. Zápěstí. Hlavice (nebo chapadlo)")
20
4.2 Části systému průmyslového robota
Motorický systém zajišťuje vlastní pohyb robota a aktivně působí na prostředí. Senzorický systém přijímá prostřednictví receptorů (snímačů) informace o prostředí. Řídící systém zpracuje informace o prostředí a na základě programu provádí řízení veškeré činnosti robota.
 informace o prostředí. Řídící systém zpracuje informace o prostředí a na základě programu provádí řízení veškeré činnosti robota.")
21
4.2.1 Motorický systém robotů Motorický systém robotů (efektory) zajišťuje veškerý pohyb robota. Podle rozsahu pohybu robota rozlišujeme tři druhy pohybů: pohyby manévrovací (globální) – vykonává lokomoční podsystém pohyby operační (regionální) – vykonává manipulační podsystém pohyby suboperační (místní) – vykonává manipulační podsystém
 – vykonává lokomoční podsystém pohyby operační (regionální) – vykonává manipulační podsystém pohyby suboperační (místní) – vykonává manipulační podsystém .")
22
1. POHYBY MANÉVROVACÍ (GLOBÁLNÍ) To jsou takové pohyby, které umožňují přesuny na vzdálenosti větší než jsou celkové rozměry robota. Robot, který může provádět manévrovací pohyby, je mobilní robot, ten který je nemůže provádět je stacionární. Manévrovací pohyby provádí lokomoční podsystém. Většina současných typů průmyslových robotů je v tomto smyslu nepohyblivá a jejich poloha v prostoru je pevně fixovaná.
 To jsou takové pohyby, které umožňují přesuny na vzdálenosti větší než jsou celkové rozměry robota. Robot, který může provádět manévrovací pohyby, je mobilní robot, ten který je nemůže provádět je stacionární. Manévrovací pohyby provádí lokomoční podsystém. Většina současných typů průmyslových robotů je v tomto smyslu nepohyblivá a jejich poloha v prostoru je pevně fixovaná.")
23
Plně mobilní roboty pracují zpravidla pod přímým a nepřetržitým dohledem člověka. Snaha konstruktérů mobilních robotů je postavit co nejpohyblivějšího robota, schopného např. otočit se na místě (to se dociluje např. tříkolovým podvozkem, u kterého jsou všechny kola nezávisle řiditelná). Další snahou konstruktérů je docílit vysoké průchodivosti robota (pásové pohony umožňují lépe překonávat překážky, např. schody).
. Další snahou konstruktérů je docílit vysoké průchodivosti robota (pásové pohony umožňují lépe překonávat překážky, např. schody)..")
24
2. POHYBY OPERAČNÍ (REGIONÁLNÍ) Jsou to pohyby, které robotu umožňují přemisťovat výstupní hlavici do různých bodů pracovního prostoru, který je vymezen prakticky rozměry robota. Operační pohyby jsou prováděny manipulačním podsystémem.
 Jsou to pohyby, které robotu umožňují přemisťovat výstupní hlavici do různých bodů pracovního prostoru, který je vymezen prakticky rozměry robota. Operační pohyby jsou prováděny manipulačním podsystémem.")
25
Průmyslové roboty nahrazují člověka u výrobního stroje a coby manipulační zařízení nahrazují především lidskou ruku. Lidská ruka má 27 stupňů volnosti (rameno 2° volnosti, paže 1°, loketní kloub 1°, předloktí s dlaní 1°, zápěstí 2°, palec 3°+1°, 4 prsty a‘4° volnosti – tj. celkem 27° volnosti). Pro obecné zajištění polohy a orientace předmětů ve volném prostoru je dostačující pouze 6 stupňů volnosti (3 stupně pro polohování + 3 stupně pro orientaci). V podstatě je počet stupňů volnosti roven počtu veličin, které musíme znát, abychom pro konkrétní manipulační orgán určili jednoznačně jeho polohu v prostoru.
. Pro obecné zajištění polohy a orientace předmětů ve volném prostoru je dostačující pouze 6 stupňů volnosti (3 stupně pro polohování + 3 stupně pro orientaci). V podstatě je počet stupňů volnosti roven počtu veličin, které musíme znát, abychom pro konkrétní manipulační orgán určili jednoznačně jeho polohu v prostoru.")
26
3. POHYBY SUBOPERAČNÍ (MÍSTNÍ) Jsou to pohyby výstupní hlavice souměřitelné s rozměry hlavice. Patří sem např. zdvih čelisti chapadla, nevelké orientační pohyby, kterými se chapadlo orientuje vzhledem k uchopovanému předmětu. Suboperační pohyby provádí rovněž manipulační podsystém. Manipulační podsystém tedy vykonává operační a suboperační pohyby. Ty jsou pro roboty charakterističtější než manévrovací, protože každý robot, podobně jako člověk, mění svou rukou své okolí.

27
V charakteristice robota hraje důležitou roli údaj o počtu stupňů volnosti. Většina průmyslových robotů má 5 až 6 stupňů volnosti, vlastní rameno má 3 stupně volností u těchto jednoduchých kinematických struktur stačí k tomu, aby rameno dosáhlo libovolného zadaného bodu v pracovním prostoru, zadat 3 souřadnice, které jsou právě totožní s běžně užívaným souřadnými soustavami. Každá varianta vymezuje určitý teoretický operační prostor robota, ve kterém by měl svým chapadlem dosáhnout libovolného bodu. Při praktickému provedení vznikají v pracovním prostoru „hluchá“ místa, do kterých robot nedosáhne.

28
Zvýšení stupňů volnosti zvyšuje manipulační schopnosti robota
Zvýšení stupňů volnosti zvyšuje manipulační schopnosti robota. Zároveň se ovšem zvyšují nároky na řídící systém robota.

29
Kinematika robotů U robotů se v praxi nejvíce rozšířily čtyři základní typy kinematických dvojic, kterým potom odpovídá určitý pracovní prostor robotů. Pracovní prostor je oblast, kterou obsáhne koncový bod ramene robota.

30
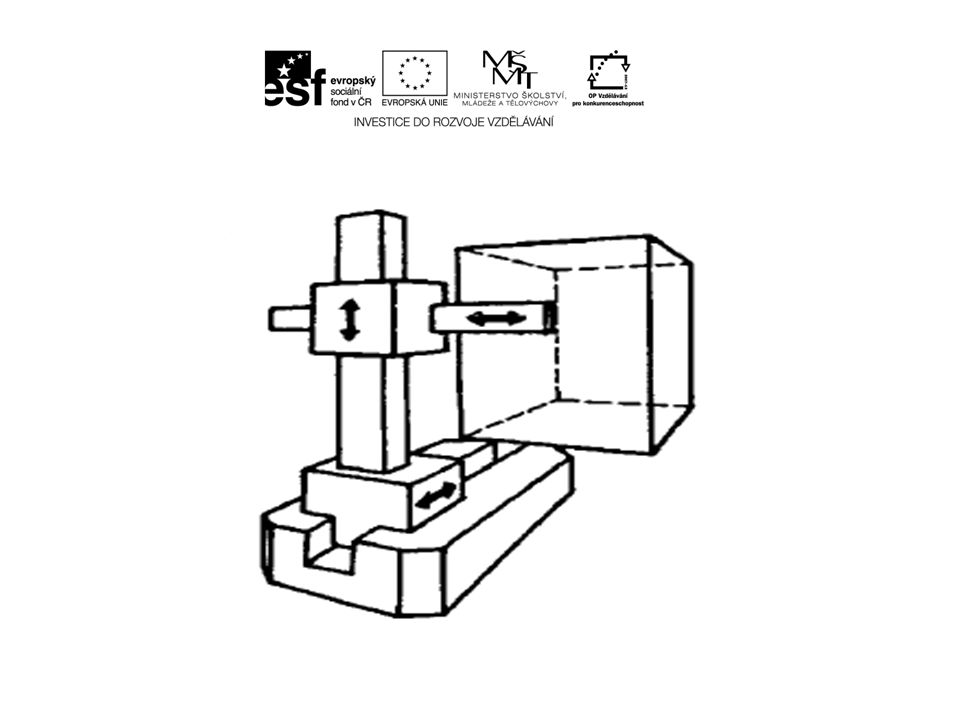
a) pravoúhlá (kartézská) soustava
TTT - tři přímočaré (translační) pohyby. Pracovní systém má tvar hranolu (kvádr nebo krychle). Používá pravoúhlý souřadný systém. Výhody : Systém je velmi stabilní a přesný (je to nejpřesnější systém), má jednoduché řízení. Nevýhody : nižší prostorová pohyblivost.
 pohyby. Pracovní systém má tvar hranolu (kvádr nebo krychle). Používá pravoúhlý souřadný systém. Výhody : Systém je velmi stabilní a přesný (je to nejpřesnější systém), má jednoduché řízení. Nevýhody : nižší prostorová pohyblivost.")
32
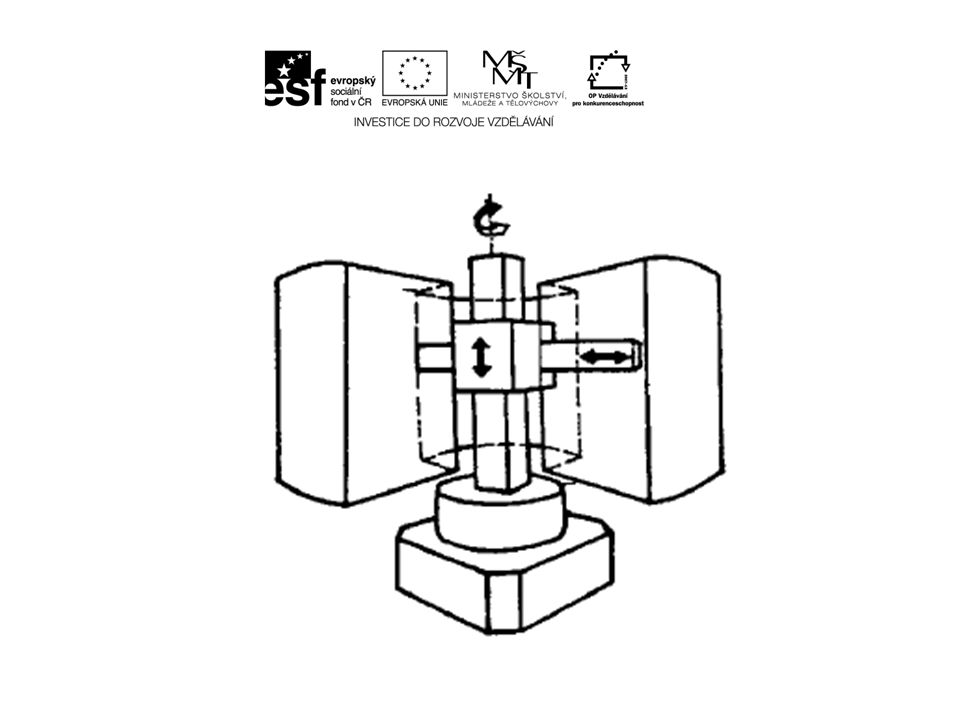
b)válcová (cylindrická) soustava TTR – dva přímočaré a jeden rotační pohyb. Pracovní prostor má tvar válcového segmentu. Výhoda : robustní systém s jednoduchým řízením.

34
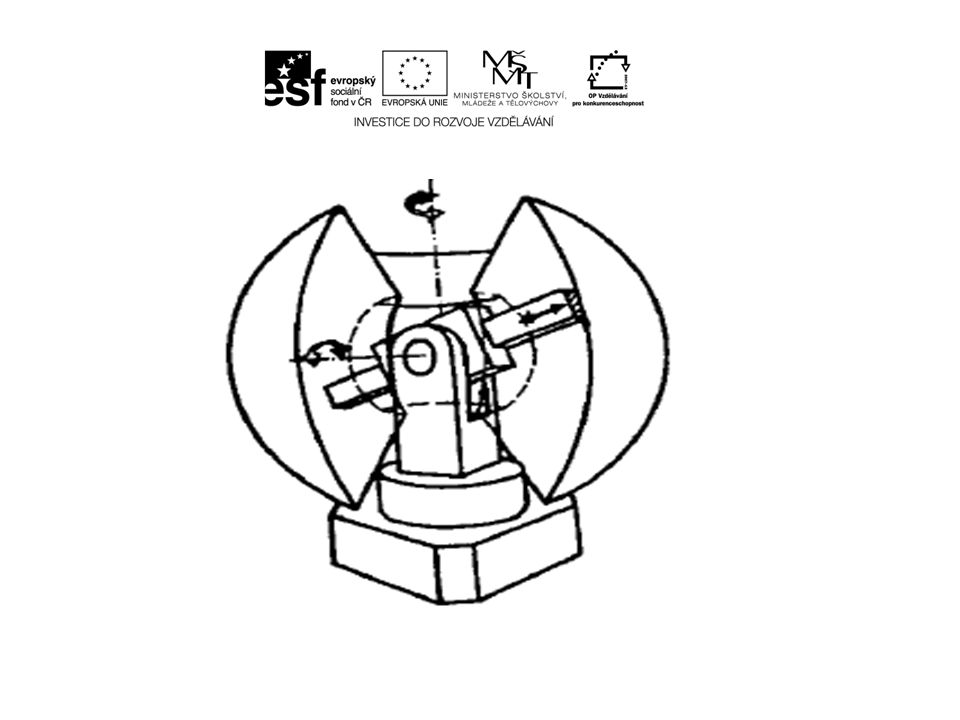
c) sférická (kulová) soustava TRR – jeden přímočarý a 2 rotační pohyby
c) sférická (kulová) soustava TRR – jeden přímočarý a 2 rotační pohyby. Pracovní prostor má tvar kulového segmentu. Výhoda : dobře umístěná zóna obsluhy a vyšší pohyblivost. Nevýhoda : robot však má menší pracovní prostor a složitější řízení.
 sférická (kulová) soustava TRR – jeden přímočarý a 2 rotační pohyby. Pracovní prostor má tvar kulového segmentu. Výhoda : dobře umístěná zóna obsluhy a vyšší pohyblivost. Nevýhoda : robot však má menší pracovní prostor a složitější řízení.")
36
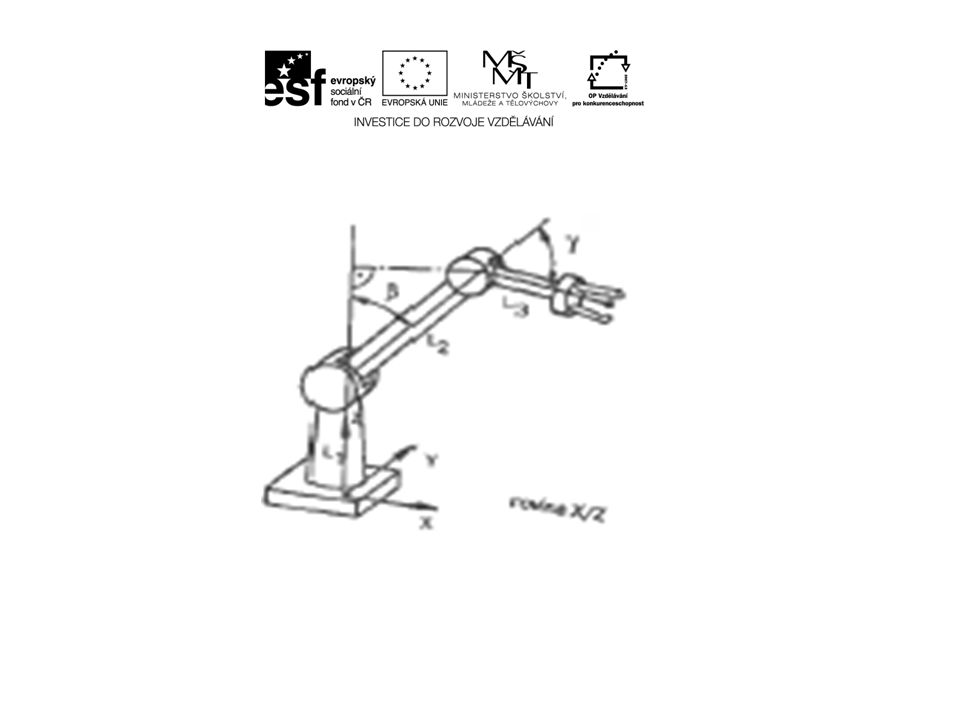
d) torusová (složená, angulární, anthropomorfní) soustava RRR – tři rotační pohyby. Pracovní prostor má tvar torusového segmentu (torus =“OBLOUN“). Používá kulový souřadnicový systém. Výhoda :Roboty mají dobrou manipulační schopnost, vysokou pohyblivost. Nevýhoda : při náročnějším řízení dosahují nižší pracovní přesnosti.
. Používá kulový souřadnicový systém. Výhoda :Roboty mají dobrou manipulační schopnost, vysokou pohyblivost. Nevýhoda : při náročnějším řízení dosahují nižší pracovní přesnosti.")
38
Dále pak , kromě uvedených 4 základních, se často objevují ve světové produkci i průmyslové roboty v dalších modifikacích (např. TRT, atd.).
.")
39
4.2.2 Senzorický systém robotů
Činnost řídícího systému robota je podmíněna existencí informací o skutečné poloze, stavu dalších funkčních částí, změnách parametrů pracovního prostředí apod. Snímače jsou měřiče většinou neelektrických fyzikálních veličin (poloha, rychlost, zrychlení) na elektrický signál, který je dále zpracován a veden do vlastního řídícího systému. Z hlediska druhu informace lze rozlišit: snímače vnitřní informace snímače vnější informace
 na elektrický signál, který je dále zpracován a veden do vlastního řídícího systému. Z hlediska druhu informace lze rozlišit: snímače vnitřní informace. snímače vnější informace.")
40
1. SNÍMAČE VNITŘNÍ INFORMACE Jsou určeny jako tzv
1. SNÍMAČE VNITŘNÍ INFORMACE Jsou určeny jako tzv. vnitřní zpětná vazba ke zjišťování stavu průmyslového robota (např. poloha jednotlivých částí stroje, rychlost, zrychlení, síla, momenty, tlak, apod.). Podle charakteru výstupního signálu je lze rozdělit na analogové a číslicové.
. Podle charakteru výstupního signálu je lze rozdělit na analogové a číslicové.")
41
a) Analogové snímače pracují se změnou některého ze základních parametrů elektrického obvodu. Jsou to snímače odporové, indukčnostní nebo kapacitní. U průmyslových robotů se nejčastěji používají snímače potenciometrické, které převádějí přímočaré posunutí nebo natočení jezdce na změnu elektrického napětí, dále polohové transformátory, selsyny, indukčnostní snímače apod

42
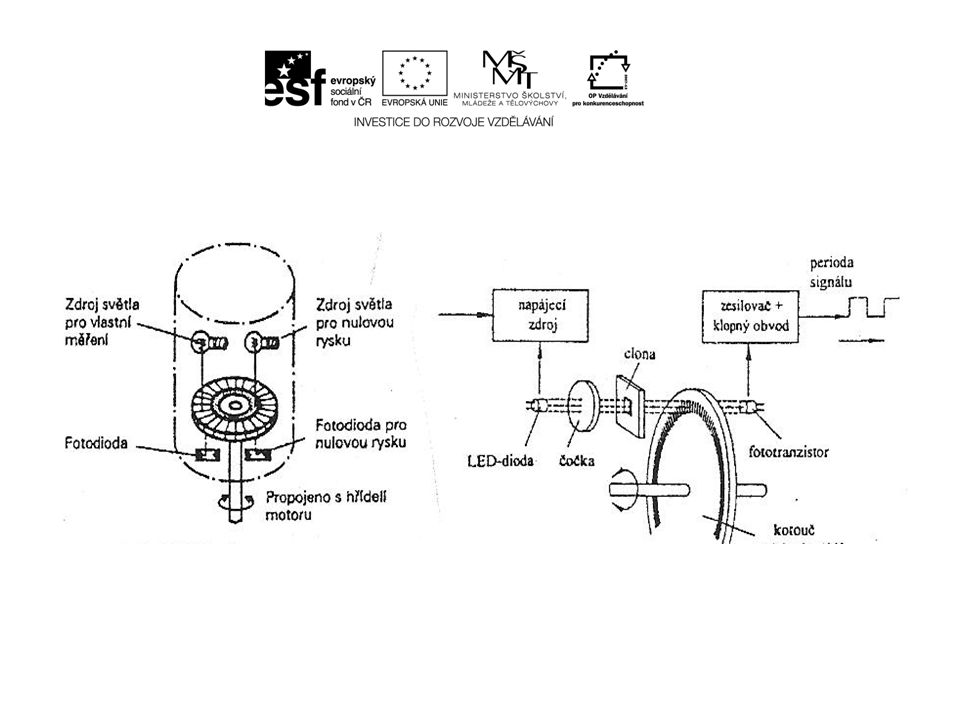
b) Číslicové snímače dovolují interpretovat polohu nebo rychlosti lze získat kódovými kotouči, nejčastěji rotačními (nebo lineárními) inkrementálními snímači, pracujícími se sledem impulsů, získaných posunutím o násobek jednotkových kroků (inkrementů). Mezi diskrétní odměřovací prostředky patří rovněž koncové spínače a clony.

43
Snímače velikost každého skutečného posunu odměřují buď prostřednictvím absolutního nebo inkrementálního (přírůstkového) odměřování.
 odměřování.")
44
1) Absolutní odměřování dává okamžitou informaci o poloze součásti, jejíž polohu odměřujeme, bez ohledu na to, kde dříve byla. Proto nahodilé chyby nemají vliv na další výsledky měření.

45
2) U inkrementálních (tj
2) U inkrementálních (tj. přírůstkových) systémů počítáme kolik elementů přibylo nebo ubylo směrem od nebo směrem k určité výchozí poloze. Výchozí poloha musí být neměnná. Inkrementální odměřování se realizuje principiálně stejně pro rotační i přímočarý pohyb. Pohybující se součást je spojena s clonkou (nebo řadou clonek) které přerušují proud stlačeného vzduchu, magnetický tok, světelný tok, elektrický proud.
 U inkrementálních (tj. přírůstkových) systémů počítáme kolik elementů přibylo nebo ubylo směrem od nebo směrem k určité výchozí poloze. Výchozí poloha musí být neměnná. Inkrementální odměřování se realizuje principiálně stejně pro rotační i přímočarý pohyb. Pohybující se součást je spojena s clonkou (nebo řadou clonek) které přerušují proud stlačeného vzduchu, magnetický tok, světelný tok, elektrický proud.")
47
2. SNÍMAČE VNĚJŠÍ INFORMACE Jako tzv
2. SNÍMAČE VNĚJŠÍ INFORMACE Jako tzv. vnější zpětná vazba jsou určeny ke zjišťování stavu pracovního prostředí a k interakci průmyslového robota s tímto prostředím. Jsou buď přímo součástí konstrukce průmyslového robota, nebo jsou umístěny v jeho pracovní zóně. Mohou zjišťovat relativní polohu systému hlavice – objekt v prostoru, tvar a rozměry objektů v prostoru nebo parametry pracovního prostředí Mezi nejdůležitější informace z pracovní zóny průmyslového robota patří informace o poloze, tvaru a rozměrech objektů. Tato zpětná vazba kontroluje vně robota, zda jeho chapadlo a předměty, s nimiž má manipulovat, jsou tam, kde mají být, respektive sděluje, kde skutečně jsou. K získání těchto informací je využívána celá řada principů.

48
Jsou zde užívány zejména koncové spínače, dorazy, clony, infračervená čidla překážek, taktilní neboli hmatová čidla pneumatická, elektrická kontaktní i bezkontaktní, čidla kovových předmětů s oscilátory a různé optické systémy až po televizní a termovizní kamery. Patří sem fotoeletrické snímače, pracující na principu měření intenzity odráženého světelného toku.

49
Nejrozšířenější skupinou jsou dotykové snímače; nejjednodušší jsou kontaktní spínače – mají dvě pracovní polohy: zapnuto – vypnuto. Mezi ně patří snímače typu mikrospínače. Princip rozpoznávání je založen na zobrazení povrchu zkoumaného objektu množinou bodů ve stanovených rovinách. Snímač je tvořen soustavou jehlových dotykových prvků, jejichž poloha odpovídá zvoleným rovinám a které jsou umístěny v hlavici. Při zachycení objektu jsou v řídícím systému porovnány signály dotykových snímačů s modely jednotlivých objektů, které jsou uloženy v paměti řídícího systému.

50
Další skupinou jsou snímače vizuální informace o pracovním prostředí
Další skupinou jsou snímače vizuální informace o pracovním prostředí. Jednodušší konstrukce využívají snímačů realizovaných sestavou fotodiod. Dokonalejší systémy používají integrovaných matic CCD, které umožňují lokalizaci objektu v prostoru, případně určení rozměrů a základních geometrických vlastností. Televizní systémy vizuální informace využívají kamer, v současné době již s digitálním výstupem; vizuální informace jsou základem vnitřního modelu prostředí pro řízení činnosti robota.

51
4.2.3 Řídící systém robotů Starší roboty měly řídící systém realizován např. pomocí vačkových mechanismů se spínači apod.. U nových se využívá mikroprocesorů a mikropočítačů:

52
Řídící systémy se třídí podle různých hledisek:
Podle časového průběhu lze řídící systémy dělit: časově závislé (řídí manipulační část podle pevného časového plánu) závislé od vykonávané práce (robot vše řídí podle průběhu procesu) smíšené systémy – těch je většina
 závislé od vykonávané práce (robot vše řídí podle průběhu procesu) smíšené systémy – těch je většina.")
53
Podle způsobu programování se řídící systémy dělí:
systémy s pevným programem (spíše dříve, např. vačkové systémy) programovatelné (plán práce = program lze snadno měnit).
 programovatelné (plán práce = program lze snadno měnit).")
54
Podle způsobu zpracování informace v řídícím systému se systémy dělí na analogové a číslicové Podle průběhu dráhy manipulačního systém dělíme řízení na:

55
PTP řízení – řízení bod po bodu (Point to Point) – bodové řízení – manipulační nebo technologická operace je rozdělena do poměrně malého počtu jednoduchých kroků (obvykle 30 až 50)
 – bodové řízení – manipulační nebo technologická operace je rozdělena do poměrně malého počtu jednoduchých kroků (obvykle 30 až 50)")
56
CP řízení – (Continues Path) - spojité řízení – klade vyšší nároky na počítač, přesnost a vlastnosti výkonných orgánů. Řízení podle souvislé trajektorie klade mnohem vyšší nároky na paměť programu, na vytvoření vhodné programovací metody. Na druhé straně však umožňuje realizaci daleko komplexnějších pohybů výkonné části a činnosti ve složitě členěném pracovním prostoru s mnoha omezeními.

57
5. Způsoby programování průmyslových robotů Programování průmyslových robotů je uskutečňováno prostřednictvím programovacího software (firemní záležitost dle výrobce). Způsoby programování jsou následující:
. Způsoby programování jsou následující: .")
58
1) Přímé programování a) Ruční programování – zadávání hodnot souřadnic ručně na klávesnici PC b) Metoda „teach-in“ zadávání povelů (instrukcí) a souřadnic prostřednictvím ovládacího panelu (tzv. teach-in box)
 Metoda „teach-in - zadávání povelů (instrukcí) a souřadnic prostřednictvím ovládacího panelu (tzv. teach-in box)")
60
Zdlouhavé a časově náročné zadávání jednotlivých souřadnic je nahrazeno tím, že řídící systém sám snímá prostřednictvím zaučovací jednotky průběh požadované dráhy v krokovém režimu, ty pak ukládá do paměti. Po vyvolání příslušného programu je dráha k dispozici.

61
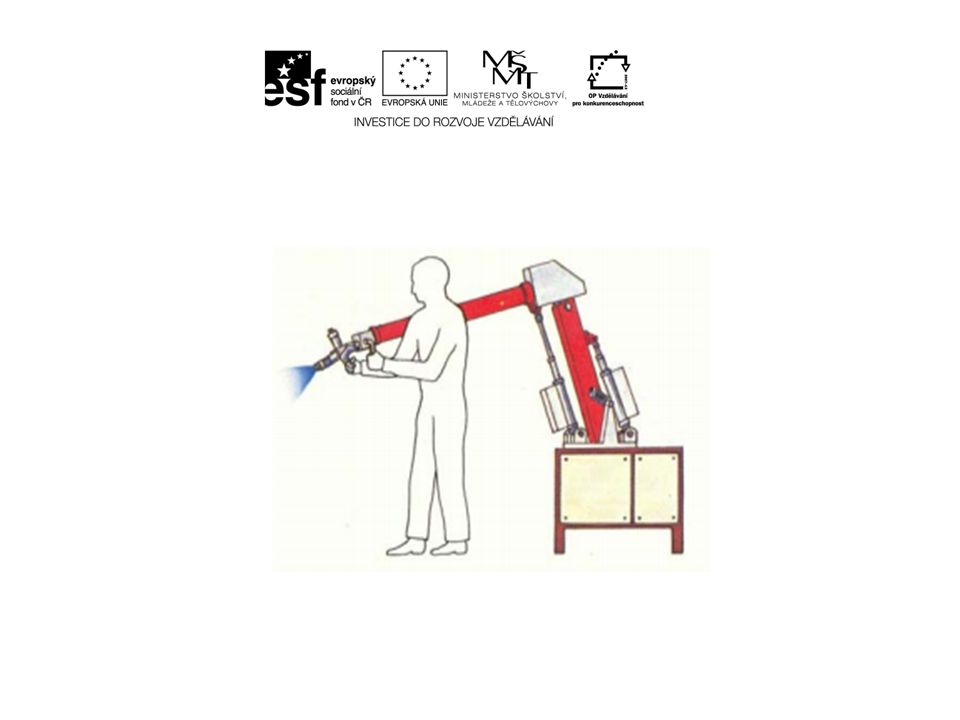
c) Metoda „play-back“ - metoda „opakování záznamu“ Zadávání prostorové křivky pohybu robota zadává člověk – profesionál daného oboru, řídící jednotka pohyby zaznamenává (souřadnice pohybu) a potom robot sám zadaný program přehrává vyvoláním příslušného prpogramu z řídící jednotky. Vhodné pro svařování, lakování, atd.

63
2) Nepřímé (off-line) programování – zadávání trajektorie pohybu ve formě prostorových křivek (nejčastěji z výkresu). Není řešeno v reálném čase.

64
3) Přímé plánování (on-line) - jako předchozí plus přizpůsobování robota vnějším podmínkám (prostřednictvím senzorů), tzn. Řešeno v reálném čase.

65
6. Příklady použití ve strojírenské praxi

67
ZDROJE: - Školící a tréningové materiály, Ing. Milan Begeš, Mitsubishi
electric, Ostrava, - Robotika, Doc. Ing. František Šolc, CSc a kol., FEKT VUT Brno, 2002 - Automatizace pro obor slaboproudá elektrotechnika, Ing. Miroslava Odstrčilíková, SPŠE Brno, 2003 - Vlastní zdroje












 -menší - měly původně pevně danou konfiguraci integrovaných modulů a byly uzavřeny v jednom pouzdře. -Pouzdro se montuje.>")




 1999. Tralvex Yeap. All Rights Reserved.>")






 Roboty a manipulátory>")
