Stáhnout prezentaci
Prezentace se nahrává, počkejte prosím

1
Návrh komunikačního protokolu pro řízení vybraných robotických platforem Robert Čížek

2
Implementace základních rutin robotů Sestavení komunikačního protokolu pro jednotlivé platformy Otestování funkčnosti řešení Robert Čížek

3
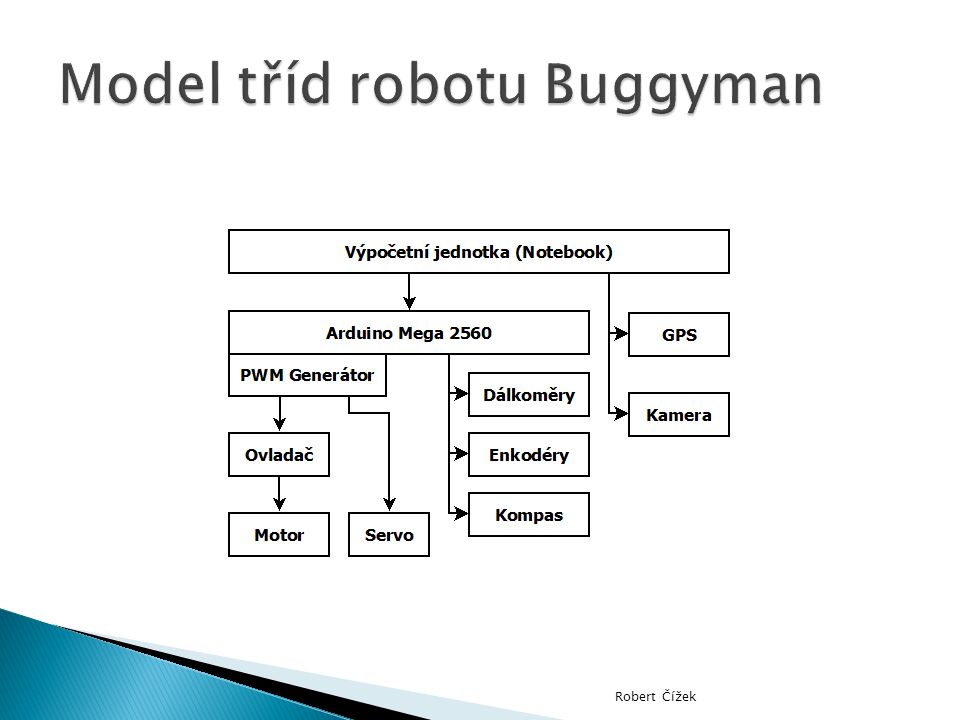
Robot Buggyman v parku na testovací jízdě před soutěží v Písku Robert Čížek Robot Buggyman

4
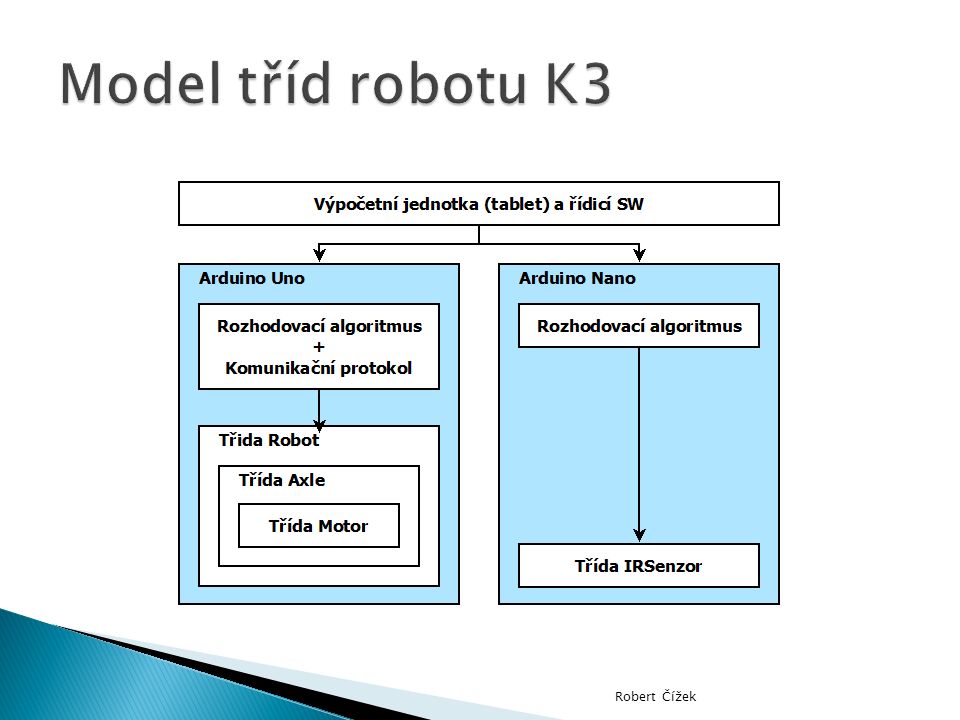
Renderovaný model robotu K3 v programu Solidworks Robert Čížek Robot K3

5
Výpočetní a kontrolní jednotka nižší HW vrstvy Arduino (C++) ◦ MEGA 2560 (Buggyman) ◦ Uno R2 (K3) ◦ Nano (K3) Komunikační protokol ◦ Sériový port (COM) Robert Čížek
 ◦ MEGA 2560 (Buggyman) ◦ Uno R2 (K3) ◦ Nano (K3) Komunikační protokol ◦ Sériový port (COM) Robert Čížek")
6
Objektový návrh (enkapsulace, dědičnost) Samostatné třídy pro jednotlivá zařízení a funkční logické celky Dolní část komunikačního protokolu Rozhodovací algoritmus Robert Čížek
 Samostatné třídy pro jednotlivá zařízení a funkční logické celky Dolní část komunikačního protokolu Rozhodovací algoritmus Robert Čížek")
9
Komunikační protokol v rozsahu 1 bajt (256 příkazů) Rozdělení dolní a horní poloviny bajtu Využito celkem 58 kombinací Robert Čížek
 Rozdělení dolní a horní poloviny bajtu Využito celkem 58 kombinací Robert Čížek")
10
Dvě jednotky = dva protokoly Bajtový přenos v ASCII pro motory ◦ Forma datového paketu ◦ Enkapsulace Stop bajty Bajtový přenos čísel pro senzory Robert Čížek

11
Jednoduché úkony ◦ Volná jízda v prostoru ◦ Kalibrace podle předem daných kritérií Robotické soutěže ◦ Robotem rovně ◦ Robotic day Prague Robert Čížek

12
V hlavní smyčce programu obou robotů je definována funkce “callback” pro přerušení aktuální operace. Jakým způsobem k přerušení dochází a co se děje za procesy v programu/desce arduino? U robotu “BuggyMan” je uvedená funkcionalita enkodérů popsána pomocí magnetických relátek napojených na systém přerušení desky arduino. Jak program/deska řeší stavy volání přerušení v přerušení. (Situaci kdy sepnou 2 jazýčková relátka po sobě tak, že se nestihne vykonat předchozí přerušení.) Robert Čížek
 Robert Čížek.")
Podobné prezentace