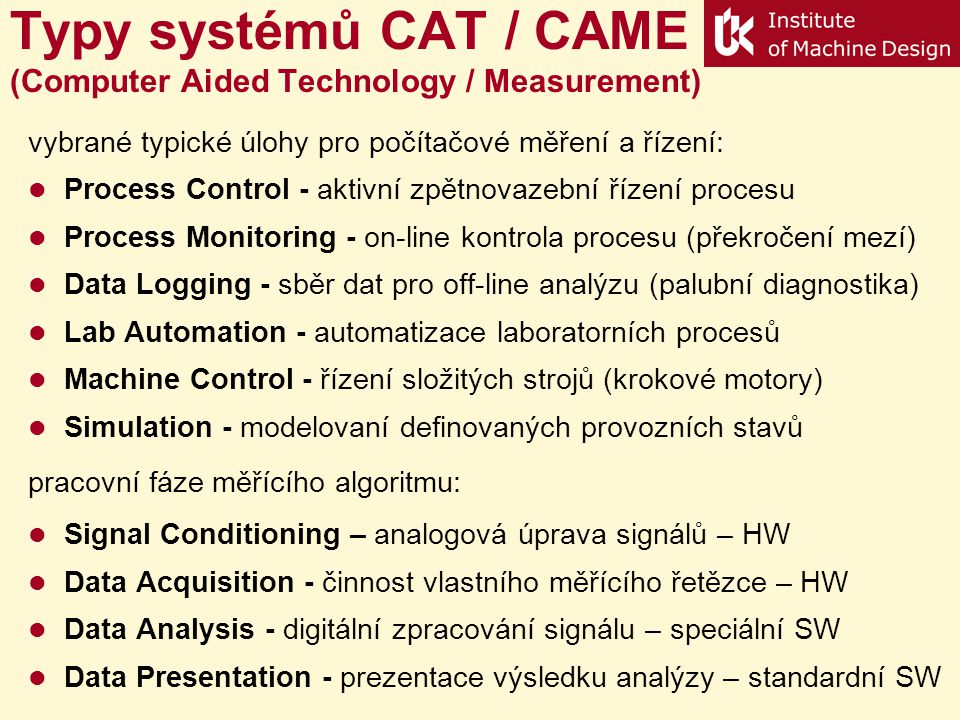
Typy systémů CAT / CAME (Computer Aided Technology / Measurement) vybrané typické úlohy pro počítačové měření a řízení: Process Control - aktivní zpětnovazební řízení procesu Process Monitoring - on-line kontrola procesu (překročení mezí) Data Logging - sběr dat pro off-line analýzu (palubní diagnostika) Lab Automation - automatizace laboratorních procesů Machine Control - řízení složitých strojů (krokové motory) Simulation - modelovaní definovaných provozních stavů pracovní fáze měřícího algoritmu: Signal Conditioning – analogová úprava signálů – HW Data Acquisition - činnost vlastního měřícího řetězce – HW Data Analysis - digitální zpracování signálu – speciální SW Data Presentation - prezentace výsledku analýzy – standardní SW
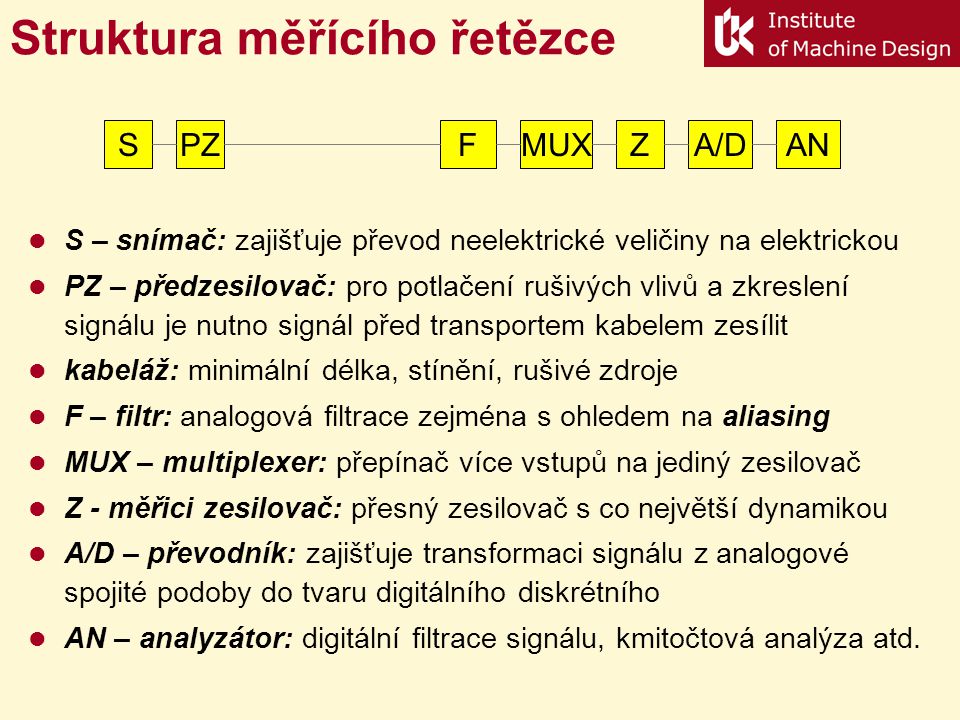
Struktura měřícího řetězce S – snímač: zajišťuje převod neelektrické veličiny na elektrickou PZ – předzesilovač: pro potlačení rušivých vlivů a zkreslení signálu je nutno signál před transportem kabelem zesílit kabeláž: minimální délka, stínění, rušivé zdroje F – filtr: analogová filtrace zejména s ohledem na aliasing MUX – multiplexer: přepínač více vstupů na jediný zesilovač Z - měřici zesilovač: přesný zesilovač s co největší dynamikou A/D – převodník: zajišťuje transformaci signálu z analogové spojité podoby do tvaru digitálního diskrétního AN – analyzátor: digitální filtrace signálu, kmitočtová analýza atd. SPZFMUXZA/DAN
Laboratorní měřící systém (CAME)
Průmyslový monitorovací systém (CAT)
Řízení měřícího a řídícího systému systémy řízené standardním PC (laboratoře, školy, výzkum): PC s implementovanými převodníky (Silicon Graphics, Apple) game port – vstup pro křížový ovládač obr. 1 obr. 2 obr. 3 data acquisition board + signal conditioning obr. 1 obr. 2 obr. 3obr. 1obr. 2obr. 3obr. 1obr. 2obr. 3 ADC + RS232/USB/LAN – standardní sériová rozhraní ADC + IEEE488 (GPIB, IMS-2) – sérioparalelní ADC + VXI (VMEbus eXtension for Instrumentations ) – paralelní bus speciální řešení řízení systému (při vysoké sériovosti): obr. 4 obr. 4 jednoduché 8bitové μP (PIC 16C56, 57) – UCB – PIC obr. 4 obr. 4 obr. 5obr. 6 obr. 5obr. 6 vyspělejší 8bitové μP (80C32, Z80) – UCB80 obr. 5, UCB52 obr. 6 obr. 5 obr. 6 obr. 7 obr. 7 stavebnice na bázi prvků PC – např. PC 104 obr. 7 obr. 7 signální procesory DSP - (TI – TMS320C30, AD – ADSP21020)
Digital Signal Processor DSP mají architekturu optimalizovanou pro matematické operace, které se uplatňují ve zpracování signálů. Vysoký výpočetní výkon tyto procesory předurčuje pro velmi náročné aplikace, které vyžadují měřit a analyzovat značné množství informací v reálném čase. DSP dosahují velkého výkonu vysokým stupněm vnitřního paralelismu a taktovacím kmitočtem. Ve srovnání s procesory pro všeobecné použití mají DSP menší spotřebu a nižší cenu. Pro vyšší účinnost datových přenosů jsou DSP vybaveny tzv. řadičem DMA (Direct Memory Acces) umožňujícím zpracovávat předem definované části adresovatelného prostoru bez účasti jádra procesoru. DSP komunikuje s okolím kombinacemi paralelního asynchronního rozhraní (flash), paralelního synchronního rozhraní (SDRAM) a řadou sériových rozhraní (A/D převodník), které jsou založeny na časovém dělení kanálu nebo standardní rozhraní RS-232, CAN, Ethernet, USB. Důraz je kladen na multiprocesorovou komunikaci, která dovoluje shlukovat DSP do výpočetních sítí, a dosáhnout tak vyššího nebo právě požadovaného výpočetního výkonu.