Stáhnout prezentaci
Prezentace se nahrává, počkejte prosím

1
Jaroslav Páral Středoškolská odborná činnost ŘÍDÍCÍ PULT PRO PŘESNÉ OVLÁDÁNÍ ROBOTA

2
Současné vysílačky Nevýhodné rozmístění prvků Nemožnost úpravy Celková velikost

3
Můj řídící pult Modulární konstrukce Bezdrátová i drátová komunikace Nastavení

4
Řídící pult obsahuje Křížové ovladače Displej Osm přepínačů či tlačítek Tři indikační diody Pět tlačítek pro displej 22 vstupů/výstupů

5
Konstrukce

6
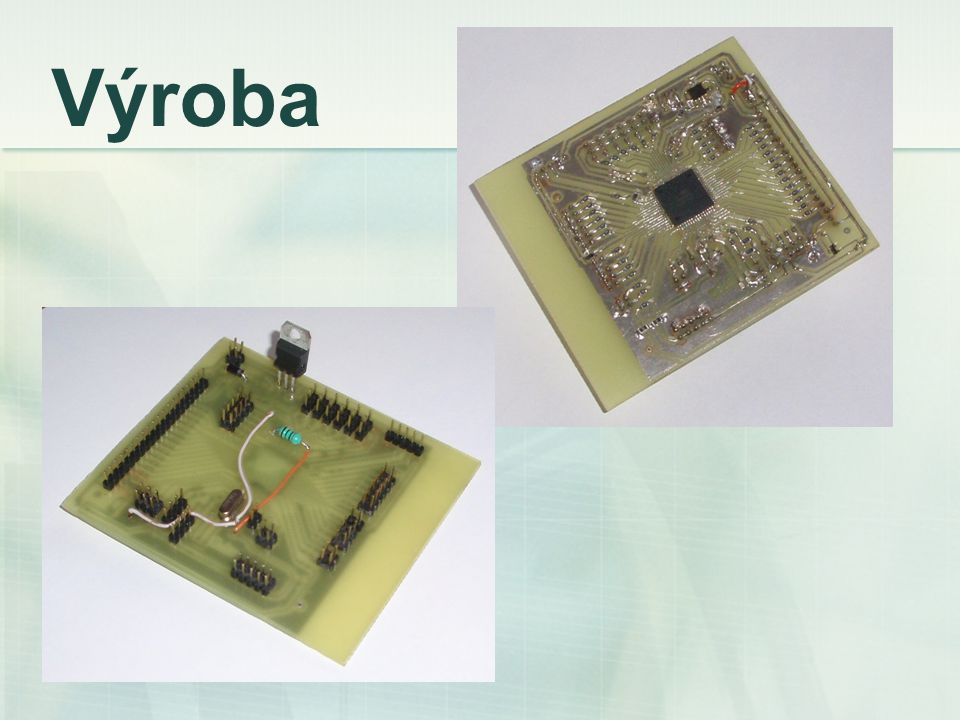
Výroba

8
Moduly MAX485 Bluetooth FTDI

9
Využití + ukázka Modeláři Robotici Záchranné složky Armáda

10
Výhody pultu Univerzálnost Velké možnosti přizpůsobení Vše ve vlastní režii Komunikace i po kabelu Naprogramována v jazyce C Snadno reprodukovatelný

11
Budoucí vize Snazší modifikovatelnost Aplikace do PC pro konfiguraci Možnost propojení s telefonem Signalizační reproduktor

12
Děkuji za pozornost Děkuji konzultantovi Jakubovi Streitovi, organizaci DDM Junior a panu profesoru Miroslavu Burdovi.

Podobné prezentace
















 Název a ID tématu: ELEKTRICKÁ.>")


