Stáhnout prezentaci
Prezentace se nahrává, počkejte prosím

1
Servopohony

2
Servopohon Co je to servopohon ? *jsou to motory, u kterých lze nastavit přesnou polohu osy, a to pomocí zpětné vazby nebo koncového spínače Charakteristika servopohonu ? *podle aplikace mohou pracovat při vysokých i nízkých otáčkách *servopohony mohou mít rychlostní a polohovou zpětnou vazbu *jsou napájeny ze sítě nebo přes měnič *používají se i servomotory s proměnnými otáčkami (jemnější nájezd pro krajní polohy) *různé požadavky na regulaci: moment, rychlost, polohu, …) *poloha je snímána pomocí -fotoelektrického snímače (encoder) -selsynu -optického snímání pomocí kódovaného kotouče -potenciometru -bez snímače polohy, pouze koncový vypínač
 *různé požadavky na regulaci: moment, rychlost, polohu, …) *poloha je snímána pomocí -fotoelektrického snímače (encoder) -selsynu -optického snímání pomocí kódovaného kotouče -potenciometru -bez snímače polohy, pouze koncový vypínač.")
3
Servopohony Hlavní části servopohonů *elektromotor *přímé napájení nebo polovodičový měnič *regulátor otáček, regulátor polohy *snímač rychlosti a polohy Zpravidla je požadavek čtyřkvadrantového provozu (oba směry otáčení a momentu) Rozdělení servopohonů podle funkce *rychlostní servopohon – má pouze otáčkovou zpětnou vazbu a umožňuje sledování zadávané rychlosti *polohový servopohon – je určen pro řízení polohy (úhel natočení nebo posuvné dráhy) -cílová regulace – optimální nastavení polohy (jeden směr) -sledovací polohová regulace – víceosé systémy
 Rozdělení servopohonů podle funkce *rychlostní servopohon – má pouze otáčkovou zpětnou vazbu a umožňuje sledování zadávané rychlosti *polohový servopohon – je určen pro řízení polohy (úhel natočení nebo posuvné dráhy) -cílová regulace – optimální nastavení polohy (jeden směr) -sledovací polohová regulace – víceosé systémy")
4
Snímače polohy Rozdělení: *absolutní – udávají absolutní polohu v celém rozsahu odměřování (ke každé pozici je přiřazena jednoznačná hodnota signálu snímače) – selsyn, optický kotouč -okamžitě po zapnutí je jednoznačně určena pozice pohonu *inkrementální – udávají relativní polohu pohonu, po zapnutí se musí pohon automaticky nastavit do základní pozice -mají vysokou přesnost -skutečná poloha je dána počtem odměřovacích impulsů *cyklicky absolutní – odměřují absolutní polohu pouze v omezené oblasti, například jedné otáčky (selsyn resolver)
 – selsyn, optický kotouč -okamžitě po zapnutí je jednoznačně určena pozice pohonu *inkrementální – udávají relativní polohu pohonu, po zapnutí se musí pohon automaticky nastavit do základní pozice -mají vysokou přesnost -skutečná poloha je dána počtem odměřovacích impulsů *cyklicky absolutní – odměřují absolutní polohu pouze v omezené oblasti, například jedné otáčky (selsyn resolver)")
5
Odporový snímač polohy *je nejjednodušší systém *použití u ventilů *provedení: Zatěžovací odpor R z by měl být co největší, aby závislost (U 2 /U)=f( ) byla přibližně lineární ( je pozice jezdce) Pro R Z » R 2 platí pro úpravu
=f( ) byla přibližně lineární ( je pozice jezdce) Pro R Z » R 2 platí pro úpravu")
6
Resolver *je polohový transformátor používaný jako absolutní snímač úhlu natočení *na statoru jsou dvě vinutí, obě vinutí jsou natočena o 90 0 *na rotoru je jedno vinutí, napájení je harmonickým signálem s konstantním kmitočtem *je napájen do rotoru *ve statorovém vinutí se indukuje napětí, obě napětí jsou proti sobě natočena o 90 0 *řídící jednotka na výstupu vyhodnocuje výslednou vzájemnou indukčnost

7
Resolver Princip: *využívá změnu vzájemné indukčnosti mezi vinutím statoru a rotoru *amplituda je dána úhlem natočení *velikost výstupního napětí je vzorkována daným kmitočtem

8
Inkrementální snímač Princip: *clonění světelného toku mezi zdrojem světla a fotocitlivými prvky *pro určení rychlosti se zjistí počet pulsů za určitý časový úsek *při zapnutí se musí nastavit nulová poloha

9
Inkrementální snímač

10
Ostatní možnosti pro snímání polohy *odporové vysílače polohy *komutátorové tachodynamo *bezkomutátorové tachodynamo *tři Hallovy sondy *absolutní inkrementální snímač (Grayův kód)
")
11
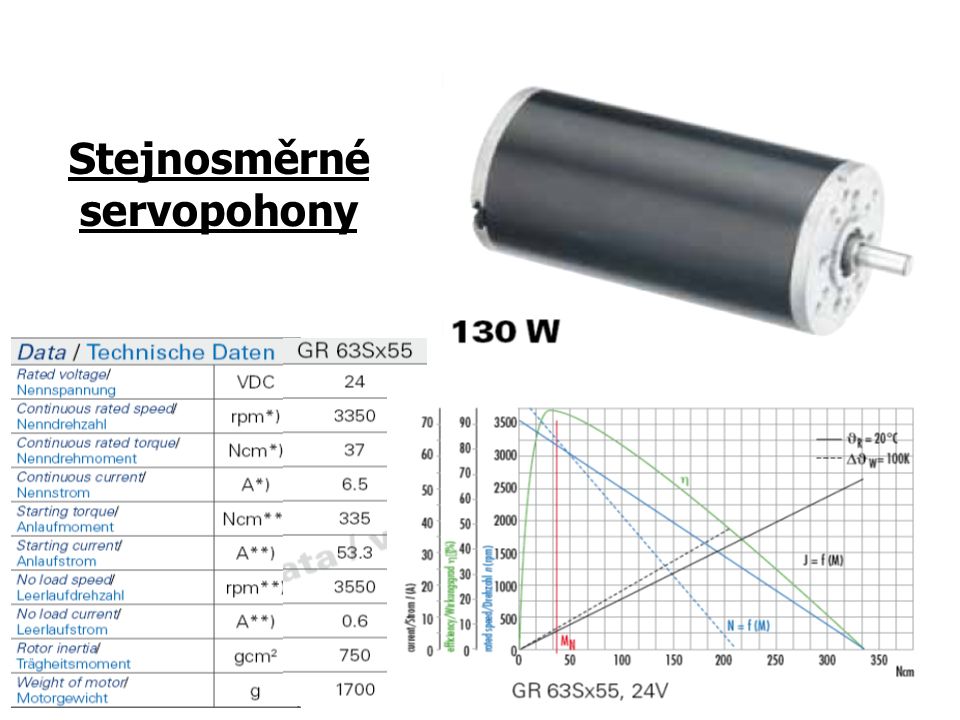
Stejnosměrné servopohony Konstrukce *konstrukce je podobná jako u synchronního motoru – na statoru je trojfázové vinutí, na rotoru budící magnety (vzácné zeminy) *vinutí statoru je napájeno obdélníkovými pulzy střídavé polarity, vždy po dobu 120 0 elektrických *v základním provedení se pro určení pozice rotoru používají Hallovy sondy (spínání po 60 0 elektrických) *u moderních motorů se používají se magnetické snímače s rozlišením až 0,3 0 *spínání jednotlivých cívek je prostřednictvím snímače polohy otáček („elektronický komutátor“) *výkony do 500 W
 *vinutí statoru je napájeno obdélníkovými pulzy střídavé polarity, vždy po dobu elektrických *v základním provedení se pro určení pozice rotoru používají Hallovy sondy (spínání po 60 0 elektrických) *u moderních motorů se používají se magnetické snímače s rozlišením až 0,3 0 *spínání jednotlivých cívek je prostřednictvím snímače polohy otáček („elektronický komutátor ) *výkony do 500 W")
12
Stejnosměrné servopohony

14
Střídavé servopohony *má stejnou konstrukci jako stejnosměrný servomotor, stator je napájen střídavým proudem *splňují požadavky na vysokou dynamiku a přesnost, malý moment setrvačnosti, velkou přetížitelnost *konstrukce a vlastnosti jsou dány širokým rozsahem použití – uzavírací ventily, robotika, obráběcí stroje *základní zapojení:

16
Ukázky servopohonů

18
*synchronní servopohon s trvalými magnety *vysoká dynamika pohybu *velká přetížitelnost *integrované měření teploty *absolutní odečítání polohy *momenty do 40 Nm *možnost doplnění elektromagnetickou brzdou

19
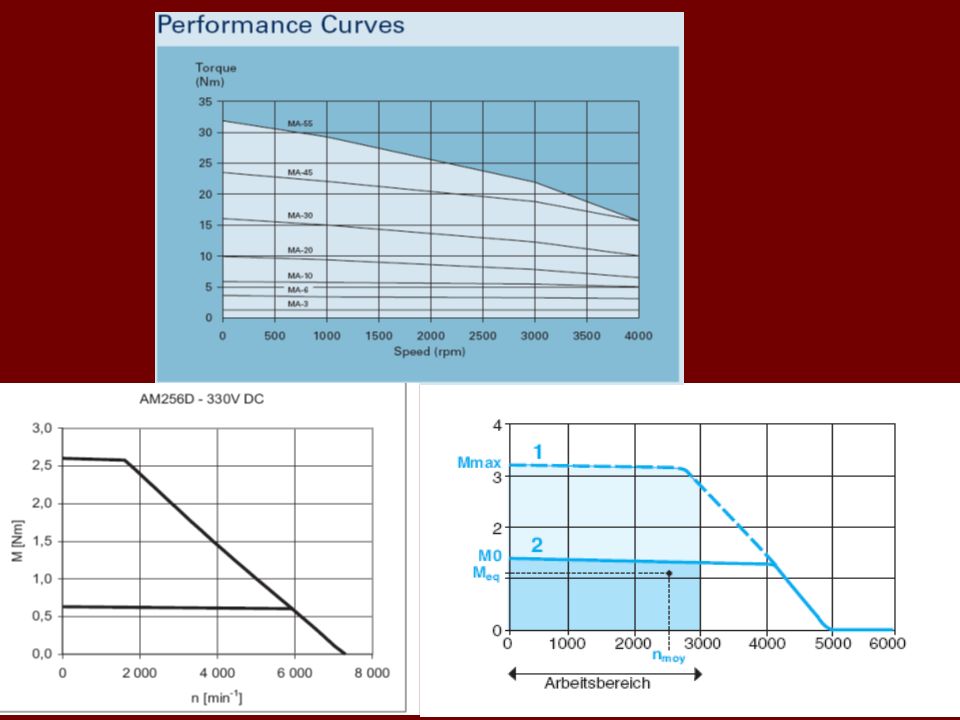
Ukázky servopohonů *vodní chlazení pro zvýšení trvalého zatížení *možnost klidové elektromagnetické brzdy *čidlo pro tepelnou ochranu přímo ve vinutí *zpětná vazba – resolver *momentová charakteristika – viz teorie

21
*jednootáčkový servopohon pro kulová ventily a klapky *mají elektronický regulátor polohy se zpětnou polohovou vazbou (vysílač polohy) *součástí jsou koncové spínače pro mezní polohy
 *součástí jsou koncové spínače pro mezní polohy")
22
synchronní servomotor

23
Materiály SkalickýElektrické servopohony TULSnímače otáček a polohy VSBČidla rychlosti a polohy

Podobné prezentace