Stáhnout prezentaci
1
Diferenciální geometrie křivek

2
Způsoby zadání rovinné křivky, polární souřadnice
Parametrické rovnice Imlicitní rovnice Explicitní rovnice Kartézské souřadnice Polární souřadnice f r M x y M x y

3
Křivka třídy Cn Množinu kE3 nazýváme křivkou třídy Cn jestliže souřadnice bodů křivky lze vyjádřit zobrazením IR3, t X(t) s vlastnostmi X(t) je spojitá na intervalu I X(t) je prostá X(t) má na intervalu I spojité derivace do n-tého řádu Vektor derivace X´(t) není nulový. Rovinná křivka Prostorová křivka
 je spojitá na intervalu I. X(t) je prostá. X(t) má na intervalu I spojité derivace do n-tého řádu. Vektor derivace X´(t) není nulový. Rovinná křivka. Prostorová křivka.")
4
Cykloida Parametrizace prosté cykloidy úhlem otočení

5
Transformace parametru
Nechť je funkcí X(t) dána křivka k třídy Cn, tI. Na intervalu J nechť je definována funkce t = f(u) s následujícími vlastnostmi f(u) je prostá na J f(u) zobrazuje J na I f(u) má spojité derivace až do n-tého řádu, pak vektorová funkce Y(u)=X(f(u)) vyjadřuje tutéž křivku jako funkce X(t).
 dána křivka k třídy Cn, tI. Na intervalu J nechť je definována funkce t = f(u) s následujícími vlastnostmi. f(u) je prostá na J. f(u) zobrazuje J na I. f(u) má spojité derivace až do n-tého řádu, pak vektorová funkce Y(u)=X(f(u)) vyjadřuje tutéž křivku jako funkce X(t).")
7
Tečna křivky Tečna křivky X(t) v regulárním bodě X(t0): X(t0) X(t)
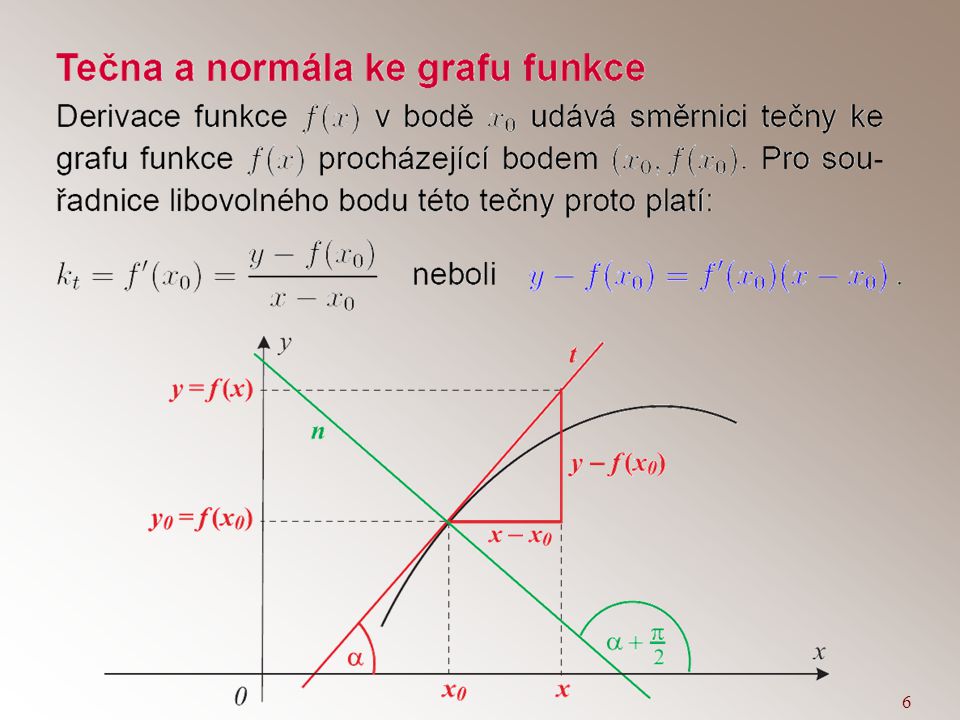
X(t0+h) X(t0) X(t) Př: Tečna grafu funkce y=f(x)v bodě f(x0):
 X(t0) X(t) Př: Tečna grafu funkce y=f(x)v bodě f(x0):")
8
Tečna křivky Pojem tečny je nezávislý na parametrizaci.
Tečna křivky X(t) v regulárním bodě X(t0): Pojem tečny je nezávislý na parametrizaci.
 v regulárním bodě X(t0): Pojem tečny je nezávislý na parametrizaci.")
9
Šroubovice

10
Šroubovice Šroubový pohyb vzniká složením rotace kolem osy o a posunutí ve směru osy o. Šroubovice je dána poloměrem r, parametrem v0 a osou šroubového pohybu o = z .

11
Šroubovice je křivka konstantního spádu
Tečna šroubovice Šroubovice: tečný vektor: půdorys tečného vektoru: Spád šroubovice: Šroubovice je křivka konstantního spádu

12
Frenetův doprovodný trojhran
Tečná rovina křivky – každá rovina, která obsahuje tečnu křivky Normálová rovina křivky – rovina kolmá na tečnu křivky Oskulační rovina křivky – tečná rovina, určená vektory první a druhé derivace. Normála křivky – každá přímka, která je kolmá na tečnu křivky a prochází daným bodem. Hlavní normála – průsečnice oskulační a normálové roviny. Frenetův doprovodný trojhran je tvořen jednotkovými směrovými vektory přímek t, n, b t – tečna n – hlavní normála b – binormála o = (t,n) – oskulační rovina n = (b,n) – normálová rovina
 – oskulační rovina. n = (b,n) – normálová rovina.")
13
Oskulační rovina šroubovice a plocha tečen šroubovice

14
Výpočet Frenetova trojhranu
Jednotkový vektor tečny Jednotkový vektor binormály Jednotkový vektor hlavní normály X

15
Inflexní bod Bod X(t0) křivky X(t) se nazývá inflexní bod křivky, jestliže jsou vektory první a druhé derivace lineárně závislé. V inflexním bodě není určen Frenetův doprovodný trojhran.

16
Délka oblouku křivky X(t) mezi body X(ta) a X(tb)
b=X(tn) X(t1) X(t2) X(t3)
 X(t1) X(t2) X(t3)")
17
Parametrizace délkou oblouku
Říkáme, že křivka je parametrizovaná obloukem, když její parametr měří délku křivky. X(t)=X(t(l)), kde t = t(l) je funkce inverzní k oblouku křivky l(t). 4 2 X(1) X(2) X(3)
=X(t(l)), kde t = t(l) je funkce inverzní k oblouku křivky l(t) X(1) X(2) X(3)")
18
Křivost křivky Křivost křivky je mírou vychýlení křivky od tečny.

19
Geometrický význam křivosti
Bod křivky je inflexní právě tehdy, je-li v něm první křivost nulová. Je-li bod V vrchol křivky, pak v něm má funkce první křivosti extrém.

20
Křivka parametrizovaná délkou oblouku
Křivka X(l) je parametrizovaná obloukem právě tehdy, když je v každém bodě vektor X´(l) jednotkový. Je-li křivka parametrizovaná obloukem, pak je vektor X(l) směrový vektor hlavní normály. Velikost vektoru X(l) je křivost k křivky. Jestliže je křivka X(l) parametrizovaná obloukem, pak pro jednotkové vektory Frenetova doprovodného trojhranu platí:
 je parametrizovaná obloukem právě tehdy, když je v každém bodě vektor X´(l) jednotkový. Je-li křivka parametrizovaná obloukem, pak je vektor X(l) směrový vektor hlavní normály. Velikost vektoru X(l) je křivost k křivky. Jestliže je křivka X(l) parametrizovaná obloukem, pak pro jednotkové vektory Frenetova doprovodného trojhranu platí:")
21
Výpočet křivosti křivky
Je-li křivka X(l) parametrizovaná obloukem Je-li křivka X(t) dána obecným parametrem Je-li křivka dána jako graf funkce y = f(x) Př: Vypočítejte funkci křivosti paraboly y = x2
 parametrizovaná obloukem. Je-li křivka X(t) dána obecným parametrem. Je-li křivka dána jako graf funkce y = f(x) Př: Vypočítejte funkci křivosti paraboly y = x2.")
22
Parametrizace šroubovice délkou křivky

23
Křivost a hlavní normála šroubovice
Šroubovice je křivka konstantní křivosti.

24
Frenetův doprovodný trojhran šroubovice
tečna hlavní normála binormála

25
Ekvidistanta křivky k Definice konstrukcí: V regulární bodě rovinné křivky k sestrojíme normálu n a na ni naneseme úsečku, jejíž velikost je rovna distanci d. Ekvidistanta křivky k je obálka systému kružnic se středem na křivce k a s poloměrem rovným distanci r=d

26
Evoluta křivky Obálka normál dané křivky
Množina středů oskulačních kružnic Evoluta je množina singulárních bodů ekvidistantních křivek

27
Oskulační kružnice křivky
V bodě T=X(t0) sestrojme hlavní normálu křivky. Na hlavní normále sestrojme bod S, ST =1/k. Kružnici se středem S a poloměrem r =1/k ležící v oskulační rovině křivky nazýváme oskulační kružnice křivky v bodě T. Oskulační kružnice a daná křivka mají v bodě T stejnou tečnu a křivost. Př: Určete oskulační kružnici paraboly 2py = x2 ve vrcholu V[0,0]. r =1/k – poloměr křivosti S – střed křivosti
 sestrojme hlavní normálu křivky. Na hlavní normále sestrojme bod S, ST =1/k. Kružnici se středem S a poloměrem r =1/k ležící v oskulační rovině křivky nazýváme oskulační kružnice křivky v bodě T. Oskulační kružnice a daná křivka mají v bodě T stejnou tečnu a křivost. Př: Určete oskulační kružnici paraboly 2py = x2 ve vrcholu V[0,0]. r =1/k – poloměr křivosti. S – střed křivosti.")
28
Oskulační kružnice elipsy

29
Oskulační kružnice Archimedovy spirály

30
Oskulační kružnice prosté cykloidy

31
Dotyk křivek O dvou křivkách řekneme, že mají v bodě P0 dotyk n-tého řádu (n+1 bodový), jestliže parametrizace obloukem X(l), Y(s) existují hodnoty parametru s0, l0, pro které platí: Dotyk nultého řádu Dotyk 1.řádu Dotyk 2. řádu t n O k
, jestliže parametrizace obloukem X(l), Y(s) existují hodnoty parametru s0, l0, pro které platí: Dotyk nultého řádu. Dotyk 1.řádu. Dotyk 2. řádu. t. n. O. k.")
32
Dotyk rovinných křivek zadaných explicitně
Jsou-li křivky v rovině dány funkcemi y = f(x), y = g(x) a platí-li pak tyto křivky mají v bodě x0 dotyk n-tého řádu. Křivka y = f(x) a její Taylorův polynom n-tého stupně mají v bodě x0 dotyk alespoň n-tého řádu.
, y = g(x) a platí-li. pak tyto křivky mají v bodě x0 dotyk n-tého řádu. Křivka y = f(x) a její Taylorův polynom n-tého stupně mají v bodě x0 dotyk alespoň n-tého řádu.")
33
Taylorův rozvoj funkce y=sin(x)
")
34
Taylorův rozvoj kružnice

35
Přechodnice Spojitý průběh křivosti.
křivky, používané v silniční i železniční dopravě pro napojení přímého úseku a kružnicového oblouku. s an s an Spojitý průběh křivosti. Kubická parabola – užívala se v ČR v železniční dopravě. Bernoulliova lemniskáta – používala se pro zatáčku menších poloměrů, na železnicích, vodních cestách i tramvajových kolejích. Zatáčka – smerovy oblouk

36
Klotoida Křivost je přímo úměrná délce oblouku k(l) = a.l
 = a.l")
37
Klotoida

38
Klotoida a kubická parabola
Sestrojíme v bodě X(0) = [0,0] Taylorův rozvoj klotoidy stupně 3.
 = [0,0] Taylorův rozvoj klotoidy stupně 3.")
39
Blossova přechodnice Délka přechodnice je stejná jako délka vzestupnice – L. Křivost zatáčky k(L) je převrácená hodnota poloměru zatáčky r. Křivost k(l) je kubickou funkcí délky oblouku l. Křivost je přímo úměrná hodnotě převýšení p(l) vzestupnice. Celkové převýšení vzestupnice - pn
 je kubickou funkcí délky oblouku l. Křivost je přímo úměrná hodnotě převýšení p(l) vzestupnice. Celkové převýšení vzestupnice - pn.")
40
Blossova přechodnice Převýšení je přímo úměrné křivosti
Blossova přechodnice X(l) bude parametrizovaná obloukem l,tj. Kde t(l) je orientovaný úhel, který svírá tečna Blossovy přechodnice s rovným úsekem.
 bude parametrizovaná obloukem l,tj. Kde t(l) je orientovaný úhel, který svírá tečna Blossovy přechodnice s rovným úsekem.")
41
Blossova přechodnice Funkci t(l) určíme ze vzorce pro křivost křivky parametrizované obloukem. Dosazením t(l) do rovnic pro směrový vektor tečny.
 do rovnic pro směrový vektor tečny.")
42
Blossova přechodnice Parametrické rovnice - Blossova přechodnice je parametrizovaná délkou l. Pro odchylku tečny v bodě napojení na zatáčku t(L) platí
 platí.")
43
Aproximace Blossovy přechodnice polynomem
Sestrojíme Taylorův rozvoj v bodě l=0. Po integraci

44
Základní vytyčovací parametry
Pro koncový bod přechodnice l=L. Souřadnice středu kružnicového oblouku Odchylka tečny přechodnice od přímého úseku




















 Zborcený rotační hyperboloid.>")
