Stáhnout prezentaci
Prezentace se nahrává, počkejte prosím

1
Inteligentní agenti

2
Agent vnímá své okolí prostřednictvím senzorů zasahuje do okolí prostřednictvím efektorů člověk, robot, softwarový agent Racionální agent agent, který dělá správné věci Správná akce akce, která způsobí, že agent bude nejús- pěšnější

3
Agent prostředí vjemy akce senzory efektory

4
Problém: kdy a jak vyhodnocovat úspěch agenta Míra výkonu (performance measure) objektivní kritéria pro měření úspěšnosti agenta výkon za dlouhou dobu (směna, životnost) Racionalita versus vševědoucnost očekávaný úspěch na základě vnímaného
 objektivní kritéria pro měření úspěšnosti agenta výkon za dlouhou dobu (směna, životnost) Racionalita versus vševědoucnost očekávaný úspěch na základě vnímaného")
5
Racionálnost akce míra výkonu, která definuje stupeň úspěchu všechny vjemy vnímané do daného okamžiku (posloupnost vjemů) znalosti agenta o prostředí akce, které agent může vykonat
 znalosti agenta o prostředí akce, které agent může vykonat")
6
Ideální racionální agent pro každou možnou posloupnost vjemů ideální racionální agent na základě faktů získaných posloupnosti vjemů a veškerých zabudovaných znalostí vykoná akci, u které je možné očekávat, že maximalizuje míru jeho výkonnosti

7
Autonomie systém je autonomní do té míry, jakou jeho vlastní zkušenost ovlivňuje jeho chování jestliže se akce agenta zakládají pouze na zabudovaných znalostech, pak agent postrádá autonomii opravdu autonomní inteligentní agent by měl být schopen úspěšně fungovat v rozmanitých prostředích, jestliže mu je poskytnut dosta- tečný čas na adaptaci

8
Struktura inteligentních agentů program agenta: –funkce zobrazující vjemy na akce architektura: –výpočetní prostředek (počítač, speciální HW) agent = architektura + program
 agent = architektura + program")
9
Zobrazení vjem akce Zobrazení posloupnosti vjemů na akce ke každé posloupnosti vjemů přiřadíme akci výčet všech možností: ideální zobrazení nemusí být explicitní (např. funkce)
.")
10
rozdíl mezi ”skutečným” a ”umělým” prostředím není důležitý důležitá je složitost vztahu mezi –chováním agenta –posloupností vjemů vytvořenou prostředím –cíli, kterých má agent dosáhnout

11
Příklad: robot kontrolující součástky na běžícím pásu softbot řídící let Boeingu 747 na simulátoru softbot třídící informace z on-line zdrojů prostředí Turingova testu

13
Programy agenta function Kostra-agenta (vjem) akce paměť, agentova paměť obsahující svět –paměť Aktualizace_paměti (paměť, vjem) –akce Výběr_nejlepší_akce (paměť) –paměť Aktualizace_paměti (paměť, akce) return akce vstupní údaj je jeden vjem cíl nebo míra výkonu není součástí programu
 akce paměť, agentova paměť obsahující svět –paměť Aktualizace_paměti (paměť, vjem) –akce Výběr_nejlepší_akce (paměť) –paměť Aktualizace_paměti (paměť, akce) return akce vstupní údaj je jeden vjem cíl nebo míra výkonu není součástí programu")
14
Nejjednodušší program: tabulka function agent_řízený_tabulkou (vjem) akce vjemy; posloupnost, na počátku prázdná tabulka; tabulka, indexovaná podle posloup- ností vjemů, na počátku plně definovaná –přidej vjem na konec posloupnosti vjemů –akce Vyhledej (vjemy, tabulka) return akce
 akce vjemy; posloupnost, na počátku prázdná tabulka; tabulka, indexovaná podle posloup- ností vjemů, na počátku plně definovaná –přidej vjem na konec posloupnosti vjemů –akce Vyhledej (vjemy, tabulka) return akce")
15
Nevýhody tabulka pro jednoduchého agenta hrajícího šachy by obsahovala 35 100 položek programátorovi by trvalo dlouho sestavit takovou tabulku agent nemá žádnou autonomii i s mechanismem učení by trvalo dlouho naučit se správné hodnoty pro všechny položky tabulky

16
Příklad: automatizovaný řidič taxíku

17
Čtyři typy programu agenta agent jednoduchého reflexu agent zaznamenávající změny ve světě agent řízený cílem agent řízený užitečností

18
Agent jednoduchého reflexu místo tabulky shrneme společně se vyskytující asociace vstup-výstup do pravidel funguje správně, jestliže je možné správnou akci zvolit pouze na základě aktuálního vjemu

19
Reflex agent Jaký je svět teď Jakou akci mám vykonat teď Pravidla podmínka-akce Prostředí Senzory Efektory

20
Fungování agenta function agent_jednoduchého_reflexu (vjem) akce pravidla, množina pravidel podmínka-akce –stav interpretace_vstupu (vjem) –pravidlo nalezení_pravidla (stav, pravidla) –akce akce_pravidla (pravidlo) return akce
 akce pravidla, množina pravidel podmínka-akce –stav interpretace_vstupu (vjem) –pravidlo nalezení_pravidla (stav, pravidla) –akce akce_pravidla (pravidlo) return akce")
21
Agent zaznamenávající změny světa znalosti o tom, jak se mění svět nezávisle na agentovi znalosti o tom, jak akce agenta ovlivňují svět

22
Reflex agent s interním stavem Jaký je svět teď Jakou akci mám vykonat teď Stav Jak se svět vyvíjí Co dělají moje akce Prostředí Pravidla podmínka-akce Senzory Efektory

23
Fungování agenta function agent_reflexu_se_stavem (vjem) akce stav, popis aktuálního stavu světa pravidla, množina pravidel podmínka-akce –stav aktualizace_stavu (stav, vjem) –pravidlo napasování_pravidla (stav, pravidla) –akce akce_pravidla (pravidlo) –stav aktualizace_stavu (stav, akce) return akce
 akce stav, popis aktuálního stavu světa pravidla, množina pravidel podmínka-akce –stav aktualizace_stavu (stav, vjem) –pravidlo napasování_pravidla (stav, pravidla) –akce akce_pravidla (pravidlo) –stav aktualizace_stavu (stav, akce) return akce")
24
Agent řízený cílem poznatky o světě ne vždy postačují k rozhod- nutí co dělat cíl popisuje situace, které jsou žádoucí agent může kombinovat cíle s informací o důsledcích svých možných akcí při výběru akce vedoucí k cíli

25
Agent řízený cílem rozhodování agenta řízeného cílem bere v úvahu budoucnost: –Co se stane, když udělám to a to? –Budu mít z toho radost? agent řízený cílem je pružnější

26
Agent s cíli Jaký je svět teď Jaký by byl svět, jestliže vykonám akci A Jakou akci mám vykonat teď Stav Jak se svět vyvíjí Co dělají moje akce Cíle Prostředí Senzory Efektory

27
Agent řízený užitečností cíle nepostačují k vytvoření chování vysoké kvality, ten samý cíl je možné dosáhnout různými způsoby Užitečnost jestliže nějakému stavu světa dáme přednost před jiným, pak ten stav je užitečnější

28
Výhody funkce užitečnosti cíle si navzájem odporují několik cílů, žádný není dosažitelný s jistotou každý racionální agent může být popsán jako agent řízený užitečností

29
Agent s užitečností Jaký je svět teď Senzory Efektory Jaký by byl svět, jestliže vykonám akci A Jak šťastný bych byl v takovém světě Jakou akci mám vykonat teď Stav Jak se svět vyvíjí Co dělají moje akce Užitečnost Prostředí

30
Prostředí - vlastnosti dostupné vs. nedostupné –všechny aspekty důležité pro výběr akce jsou dostupné prostřednictvím senzorů deterministické vs. nedeterministické –příští stav je plně určen současným stavem a akcemi agenta epizodické vs. neepizodické –události následujících epizod nesouvisí se současnými událostmi

31
Prostředí - vlastnosti statické vs. dynamické –prostředí se mění během agentova uvažování diskrétní vs. spojité –počet jasně definovaných vjemů a akcí je konečný nejobtížnější prostředí je nedostupné, neepi- zodické, dynamické a spojité

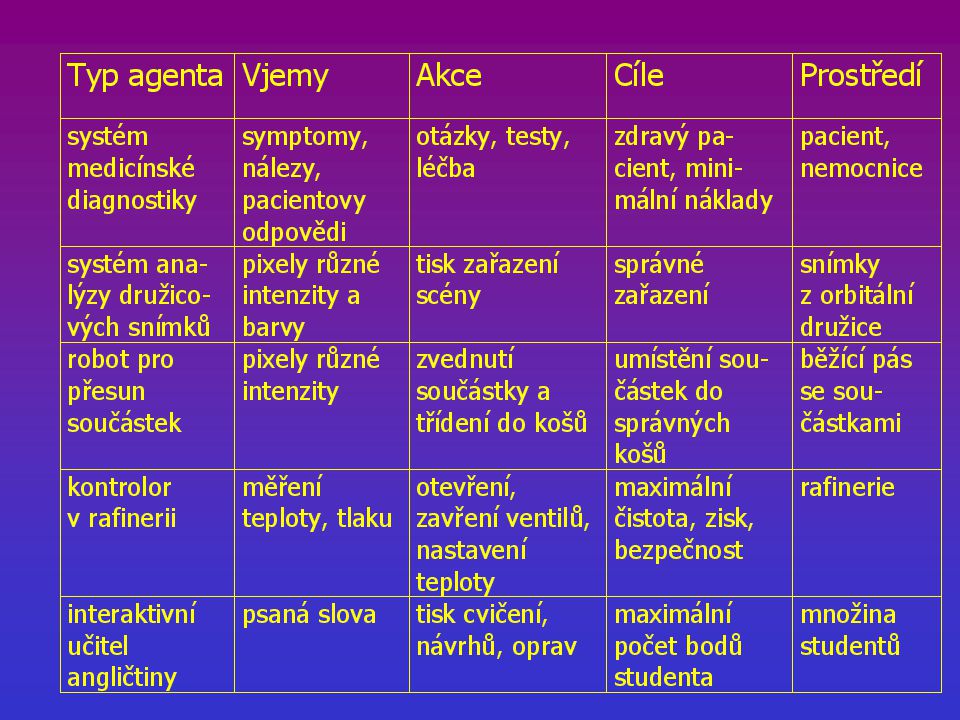
32
Prostředí – příklady

Podobné prezentace













>")





 technická.>")