Stáhnout prezentaci
Prezentace se nahrává, počkejte prosím

1
Mapy jsou pro každého 2016 Nadace Partnerství 14. – 15. 6. 2016 Měřín Možnosti využití neměřických snímků pro informatiku 15.6.2016 10:00hod Ing. Václav Šafář, VÚGTK, v.v.i.,vaclav.safar@vugtk.cz

2
Fotogrammetrické kamery se známými prvky vnitřní orientace Analogové letecké fotogrammetrické kamery PPA ! PPS! f! Distorze! FM!

3
Fotogrammetrické kamery se známými prvky vnitřní orientace Analogové pozemní fotogrammetrické kamery PPA ! PPS! f! Distorze! „FM“

4
Fotogrammetrické kamery se známými prvky vnitřní orientace PPA ! PPS! f! Distorze! „FM“ A3 Digitální letecké kamery současnosti

5
Fotogrammetrické kamery se známými prvky vnitřní orientace PPA PPS F Distorze „FM“ Digitální fotogrammetrické pozemní kamery současnosti

6
Digitální neměřické kamery současnosti Neměřické kamery RGB, IR, multispektrální, hyperspektrální ….. PPA ? PPS? f? Distorze? „FM“

7
Digitální neměřické kamery současnosti Neměřické kamery RGB, IR, multispektrální, hyperspektrální …..

9
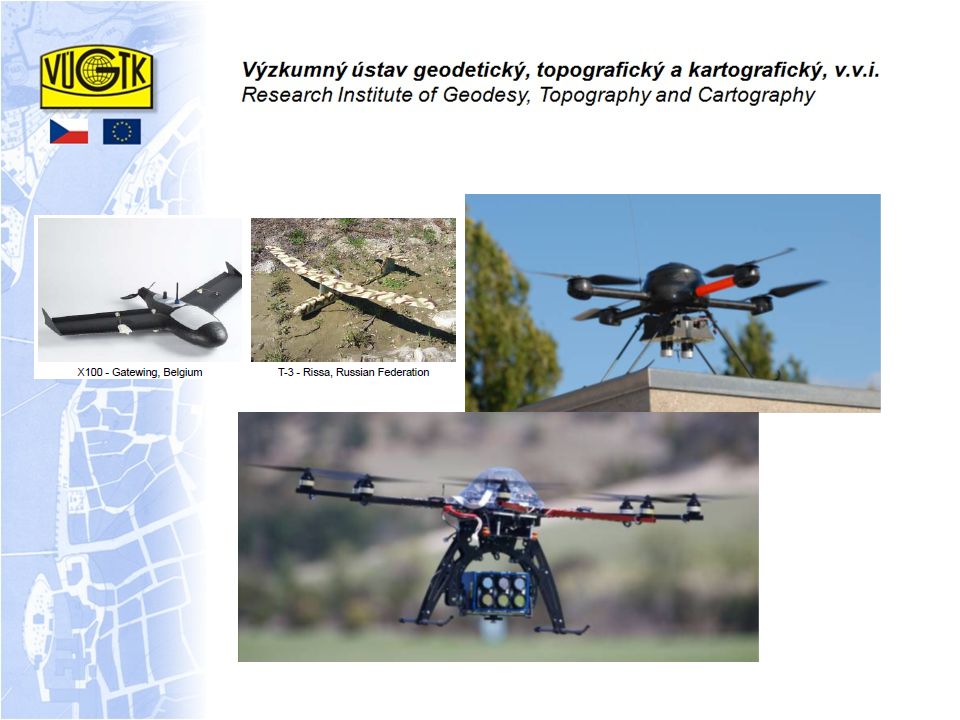
Mini UAS bezpilotní letové prostředky do 30kg (norma ÚCL ČR zatím říká nad 7kg), výdrž delší jak 1 hodina, dolet do 200km, dostup do 1250m nad úrovní terénu
, výdrž delší jak 1 hodina, dolet do 200km, dostup do 1250m nad úrovní terénu")
10
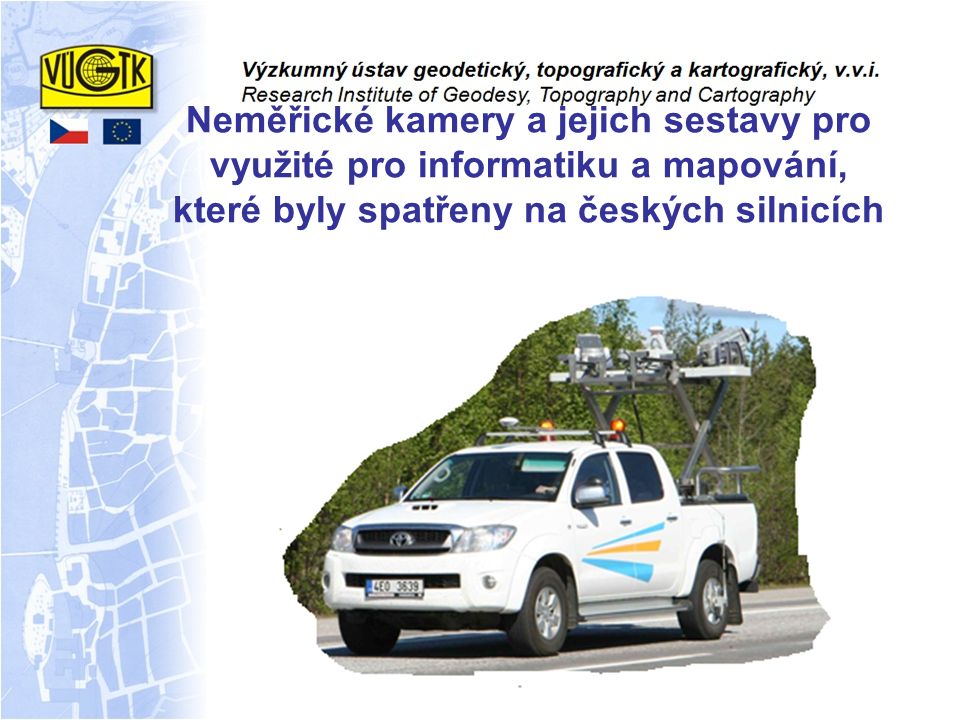
Neměřické kamery a jejich sestavy pro využité pro informatiku a mapování, které byly spatřeny na českých silnicích TopGIS a mapy.cz

11
Neměřické kamery a jejich sestavy pro využité pro informatiku a mapování, které byly spatřeny na českých silnicích

16
TopGIS a mapy.cz

17
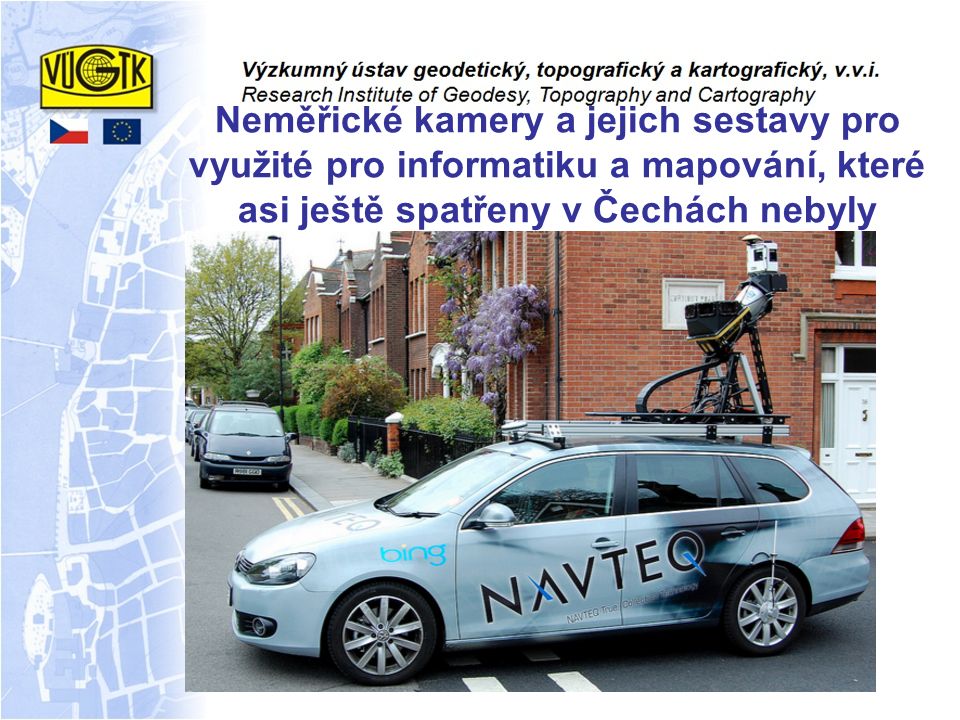
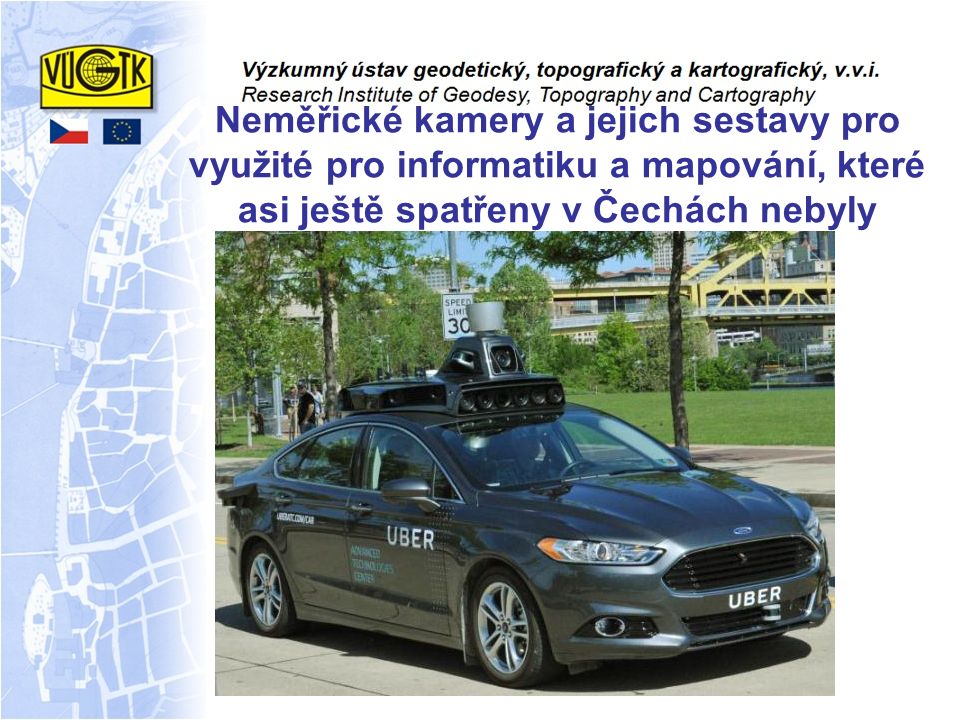
Neměřické kamery a jejich sestavy pro využité pro informatiku a mapování, které asi ještě spatřeny v Čechách nebyly

21
Apple

22
Nissan a NASA Neměřické kamery a jejich sestavy pro využité pro informatiku a mapování, které asi ještě spatřeny v Čechách nebyly

23
RZ, f, PPA Fotogrammetrické kamery se známými prvky vnitřní orientace

24
DISTORZE Fotogrammetrické kamery se známými prvky vnitřní orientace

25
DISTORZE

26
Fotogrammetrické neměřické kamery s neznámými prvky vnitřní orientace Některé z běžných postupů pro výpočet hodnot distorzí objektivů neměřických kamer : A) distorze K která vypočítává 16 matematicky odvozených koeficientů definovatelných distorzí objektivu; B) distorze H která vypočítává pouze 5 koeficientů C) Distorzní model používající Čebyševovy polynomy až s 45 koeficienty pro každou složku souřadnic. D) Brownův model symetrických složek E) Heikkilův čtyřkrokový postup korekce distorzí F) …..
 Brownův model symetrických složek E) Heikkilův čtyřkrokový postup korekce distorzí F) …...")
27
Fotogrammetrické neměřické kamery s neznámými prvky vnitřní orientace Některé z postupů pro výpočet hodnot distorzí objektivů neměřických kamer z databází distorzních profilů s předpokladem rotačně symetrického rozložení distorzí: GIMP (GNU Image Manipulation Program) - plug-in Lensfun http://seebk.github.io/GIMP-Lensfun/ http://seebk.github.io/GIMP-Lensfun/ PhotoModeler Scaner http://info.photomodeler.com/http://info.photomodeler.com/ UFRaw http://ufraw.sourceforge.net/http://ufraw.sourceforge.net/ PTLens http://www.epaperpress.com/ptlens/http://www.epaperpress.com/ptlens/ Digital Photo Professional pro většinu objektivů Canon http://www.canon.cz/support/camera_software/#tab-content1 http://www.canon.cz/support/camera_software/#tab-content1 Nikon Capture NX2 pro objektivy řady D a G http://nikonimglib.com/cnx2/index_en_nsa.html#os-windows http://nikonimglib.com/cnx2/index_en_nsa.html#os-windows
 - plug-in Lensfun PhotoModeler Scaner UFRaw PTLens Digital Photo Professional pro většinu objektivů Canon Nikon Capture NX2 pro objektivy řady D a G")
28
E.Matoušková

29
H.Rýglová

30
Fotogrammetrické neměřické kamery s neznámými prvky vnitřní orientace Některé z postupů pro výpočet hodnot distorzí objektivů neměřických kamer korelací snímkových obrazů: Pix4D enterprise Mapper Agisoft Photoscan Pro 0.9.1 ContextCapture Bentley (Acute3D) SURE Inpho ….
 SURE Inpho ….")
31
Testy pro určení prvků vnitřní orientace neměřických kamer v leteckých a pozemních aplikacích Základní parametry snímkování pro testy IO: 1.GSD od 2,5mm do 1cm 2.Použít kameru s objektivem o FOV v diagonále od 70 až 120 stupňů 3.p=70%, q=35% 4.Počet snímků alespoň 500 5.Deset snímkových řad 5 a 5 napříč 6.Výpočet IO algoritmem SGM nebo SfM 7.Dosáhnout tuhého, trvalého a neměnného spojení mezi objektivem a tělem kamery

32
Děkuji za pozornost Dotazy?

Podobné prezentace