Stáhnout prezentaci
Prezentace se nahrává, počkejte prosím

2
Asynchronní stroje, též indukční stroje Nejrozšířenější motory V kombinaci s měničem kmitočtu nejpoužívanější pohon Výkonový rozsah : jednotky W – stovky kW Alternátory v MVE Jednoduchá konstrukce, (relativně) levná výroba Používají se především 3f stroje
 levná výroba Používají se především 3f stroje")
3
Pohled na asynchronní motory běžné velikosti

4
Rozdělení asynchronních motorů

5
Konstrukce asynchronního stroje s kotvou nakrátko

6
Kostra a mag.obvod statoru Statorový plech

7
Statorové vinutí je tvořeno 3 cívkami pootočenými o 120 o, které jsou napájeny trojfázovým proudem. Tak je vytvořeno točivé magnetické pole.

8
Kotva nakrátko s ložisky a větrákem Hliníková klec Rotorový plech

9
Kroužková kotva má podobné vinutí jako stator, které je spojeno do hvězdy a vyvedené na kroužky. Na kroužky dosedají kartáče, které tvoří kluzné spojení.

10
Princip činnosti as.motoru Moment stroje vzniká elektromagnetickým působením točivého magnetického pole vytvořeného statorovým vinutím na vinutí rotoru, které je spojeno nakrátko.

11
Podmínky pro vznik točivého pole stator má alespoň 2 cívky, jejichž osy nejsou rovnoběžné cívky jsou napájeny proudy, které nejsou ve fázi

12
Točivé magnetické pole Mechanická analogie točivého pole : točící se permanentní magnet dvoupólové pole p=1, 2p=2čtyřpólové pole p=2, 2p=4 při stejné frekvenci se čtyřpólové pole točí polovičními otáčkami

13
Rychlost otáčení pole - pojmy Rychlost otáčení pole nazýváme synchronní (synchronní rychlost, častěji synchronní otáčky n s ) Počet pólových dvojic značíme p. Počet pólů pak 2p Dvoupólové pole má tedy p=1 nebo 2p=2, čtyřpólové pole pak p=2 a 2p=4 atd.

14
Rychlost otáčení pole – úvahy Lze předpokládat, že se dvoupólové pole za 1periodu proudu otočí do výchozí polohy, tedy o 360 o 60.f Za 1 minutu se tedy otočí 60.f krát, kde f je frekvence,

15
Rychlost otáčení pole – úvahy Čtyřpólové pole (p=2) se za 1 periodu proudu otočí do pozice shodné s výchozí, což je nyní otočení o 180 o Za 1 minutu se tedy otočí 60.f/2 x, tedy
 se za 1 periodu proudu otočí do pozice shodné s výchozí, což je nyní otočení o 180 o Za 1 minutu se tedy otočí 60.f/2 x, tedy")
16
Rychlost otáčení pole – úvahy po zobecnění : p1234 nsns 300015001000750 synchronní otáčky pro různé počty pólových dvojic

17
Vznik momentu Vložíme-li do točivého pole závit nakrátko, bude se v něm změnou spřaženého toku indukovat napětí a začne jím protékat proud. Na vodiče protékané proudem začne pole silově působit a bude závit strhávat ve směru točení pole.

18
Otáčky stroje, skluz Pokud by se rotor točil stejnou rychlostí jako točivé pole, nedocházelo by ke změně sdruženého toku a v závitu by se neindukovalo napětí, neprotékal by proud a mechanický moment na hřídeli by byl nulový. Rotor se proto musí otáčet o něco pomaleji, musí se otáčet s určitým skluzem s.

19
Otáčky stroje, skluz Číselně definujeme skluz jako relativní pokles otáček rotoru vůči synchronním otáčkám buď jako poměrné číslo nebo v procentním vyjádření

20
Otáčky stroje, skluz otáčky-n s -0,5 n s 00,5 n s nsns 2 n s skluz21,510,50 Skluz tedy roste opačně než otáčky a naopak :

22
Indukované napětí Asynchronní stroj se elektricky chová podobně jako transformátor : změna toku indukuje ve vinutí napětí. Proto lze odhadnout, že napěťová rovnice bude mít podobný tvar :

23
Indukované napětí Φtok jednoho pólu [Wb] ffrekvence [Hz] Npočet závitů v sérii [-] kvkv činitel vinutí
![Indukované napětí Φtok jednoho pólu [Wb] ffrekvence [Hz] Npočet závitů v sérii [-] kvkv činitel vinutí](http://images.slideplayer.cz/42/11246099/slides/slide_23.jpg "Indukované napětí Φtok jednoho pólu [Wb] ffrekvence [Hz] Npočet závitů v sérii [-] kvkv činitel vinutí")
24
Činitel vinutí Činitel vinutí má hodnotu nanejvýš 1 (kv <=1) a zavádí do vztahu mírný pokles ind.napětí způsobený rozložením vinutí do více drážek (jednotlivá napětí se pak sčítají fázorově s urč. fáz. posunem, nikoliv algebraicky) tzv.zkráceným krokem cívky (cívka pak nevytvoří max.tok dosazovaný do vztahu pro indukované napětí)
 tzv.zkráceným krokem cívky (cívka pak nevytvoří max.tok dosazovaný do vztahu pro indukované napětí).")
25
Převod asynchronního stroje Převod je definován jako poměr indukovaných napětí ve statoru a rotoru při skluzu s=1, kdy platí f 1 = f 2

26
Náhradní schéma stroje Statorové i rotorové vinutí má činný odpor R a rozptylovou reaktanci X ϭ. V rotoru komplikuje situaci skutečnost, že se frekvence mění se skluzem a tedy se zatížením stroje. Při změně frekvence mění i ind.napětí a reaktance dle naznačeného vztahu, kde X ϭ 2 a U i20 je ind.napětí a reaktance při s = 1. Oba obvody tedy za tohoto stavu nelze přepočíst a spojit jako u transformátoru.

27
Náhradní schéma stroje V předchozím rotorovém obvodu platí rovnice Vytvoříme ekvivalentní obvod tak, že předchozí rovnici vynásobíme zlomkem : U i20. p = U i1 viz definice převodu R 2. p 2 = R 21 přepočtený rotorový odpor na stator X 2. p 2 = X 21 přepočtená rotorová rozptylová reaktance na stator I 2 /p = I 21 rotorový proud přepočtený na stator kde

28
Náhradní schéma stroje Rotorový obvod se změnil tak, že indukované napětí je shodné se statorovým a oba obvody lze galvanicky spojit.

29
Náhradní schéma stroje Schéma bylo navíc doplněno o odpor R Fe reprezentující ztráty v železe a mechanické ztráty stroje. Asynchronní stroje se na vstupních svorkách chová jako transformátor, který má v sekundárním obvodu odpor, který se mění se skluzem a tedy se zatížením stroje na hřídeli.

30
Náhradní schéma stroje Pro lepší znázornění toku výkonů se upravuje rotorová část náhradního schématu tak, že se odpor rozdělí na 2 části Náhradní schéma pak vypadá následovně

31
Tok výkonu, ztráty motoru P1P1 příkon ΔP j1 jouleovy ztráty ve statoru ΔP j2 jouleovy ztráty v rotory ΔP Fe ztráty v železe PδPδ výkon přes vzd.mezeru Pvýkon na hřídeli

32
Stav naprázdno Motor nemá zátěž na hřídeli, točí se prakticky synchronně, charakteristiku lze měřit až od cca 30% U n, kdy se motor roztočí na plné otáčky. Charakteristika naprázdno I o = f(U) je opět zakřivená vlivem sycení, ztráty naprázdno, prakticky jen ztráty v železe, jsou úměrné U 2, účiník strmě klesá. Pro U n odečítáme jmenovité hodnoty naprázdno.
 je opět zakřivená vlivem sycení, ztráty naprázdno, prakticky jen ztráty v železe, jsou úměrné U 2, účiník strmě klesá. Pro U n odečítáme jmenovité hodnoty naprázdno..")
33
Stav nakrátko Rotor je zabržděn, stav je podobný stavu nakrátko trafa. Charakteristika I = f(U) je opět lineární, pouze při vysokém proudu se začínají sytit zuby rozptylovým tokem a charakteristika se ohne k vyšším proudům. Ztráty ve vinutí rostou úměrně I 2 i U 2. Účiník je téměř konstatní.
 je opět lineární, pouze při vysokém proudu se začínají sytit zuby rozptylovým tokem a charakteristika se ohne k vyšším proudům. Ztráty ve vinutí rostou úměrně I 2 i U 2. Účiník je téměř konstatní..")
35
Moment stroje Momentovou charakteristikou rozumíme závislost momentu na otáčkách (popř.skluzu) : M = f(n), nebo M = f(s).
 : M = f(n), nebo M = f(s).")
36
Typický průběh charakteristiky Mmax M max maximální moment Mzáb M záb záběrný moment s zv s zv skluz zvratu

37
Ustálený stav soustavy motor - prac.stroj M PS MM zát Soustrojí se ustálí na otáčkách, při kterých jsou momenty obou strojů stejné M = M zát

38
Klossův vztah Z náhradního schématu lze odvodit tzv.Klossův vztah, který popisuje závislost mezi momentem a skluzem. Hlavní vztah : Pomocné vztahy :

39
Vliv napětí

40
Vliv rotorového odporu

41
Vliv frekvence při konst.napětí Při snížení frekvence klesnou synchronní otáčky vzroste maximální moment

42
Vliv frekvence při U/f = konst. Maximální moment se nemění se změnou frekvence

44
Úprava náhradního schématu Příčná větev byla přesunuta na vstupní svorky. Proud naprázdno je tak konstantní. Příčná větev byla úplně vynechána.

45
Fázorový diagram Úbytky na odporu a reaktanci jsou posunuty o 90 o a tvoří se vstupním napětím pravoúhlý trojúhelník s konstantní přeponou. Vrchol X σ. I 1 se tedy pohybuje pro jakýkoli skluz po kružnici k (Thaletova věta). Proud I 1 je úměrný tomuto úbytku a je zpožděn o 90 o, koncový bod fázoru I 1 se proto také pohybuje po kružnici m.
. Proud I 1 je úměrný tomuto úbytku a je zpožděn o 90 o, koncový bod fázoru I 1 se proto také pohybuje po kružnici m..")
46
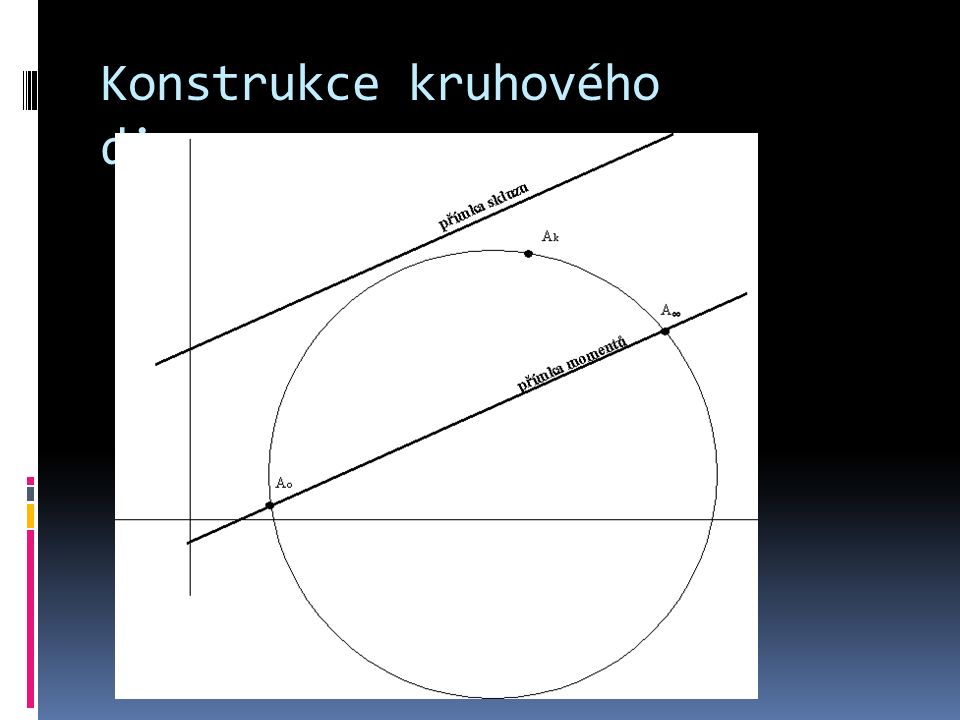
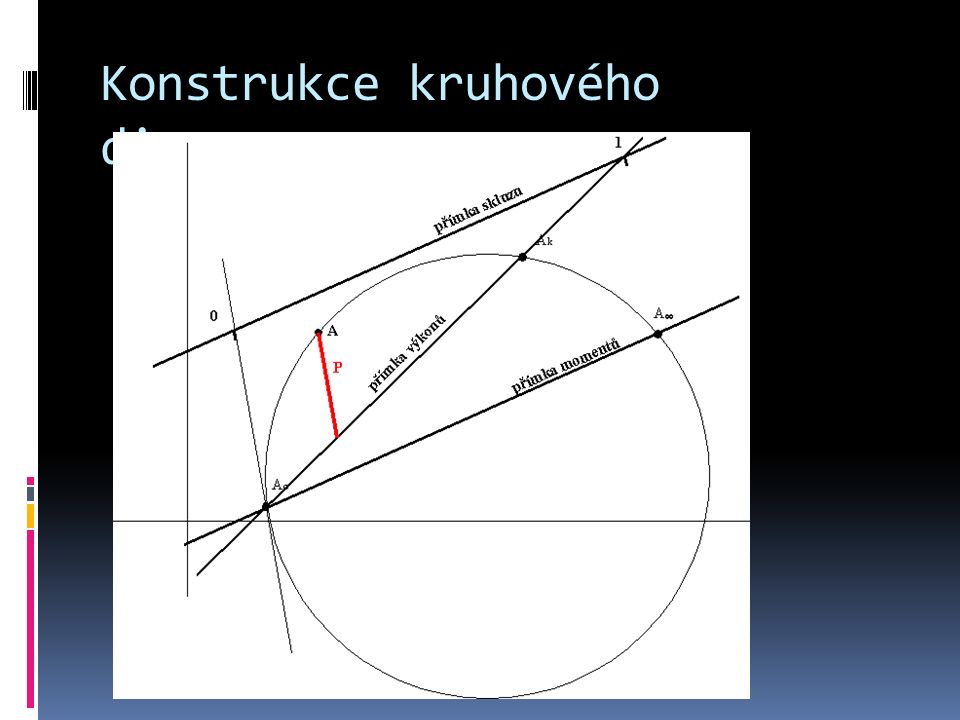
Kruhový (kružnicový) diagram Vrátíme-li na statorové svorky příčnou větev, posune se diagram proudů a tím kružnice m koncových bodů statorového proudu o konstantní fázor I o. Kružnici m všech možných (i nemožných) koncových bodů statorového proudu nazýváme kruhový diagram. Z tohoto diagramu lze odečíst důležité provozní hodnoty pro konkrétní stav stroje, jako je příkon, výkon, moment, skluz a účiník.
 koncových bodů statorového proudu nazýváme kruhový diagram. Z tohoto diagramu lze odečíst důležité provozní hodnoty pro konkrétní stav stroje, jako je příkon, výkon, moment, skluz a účiník..")
47
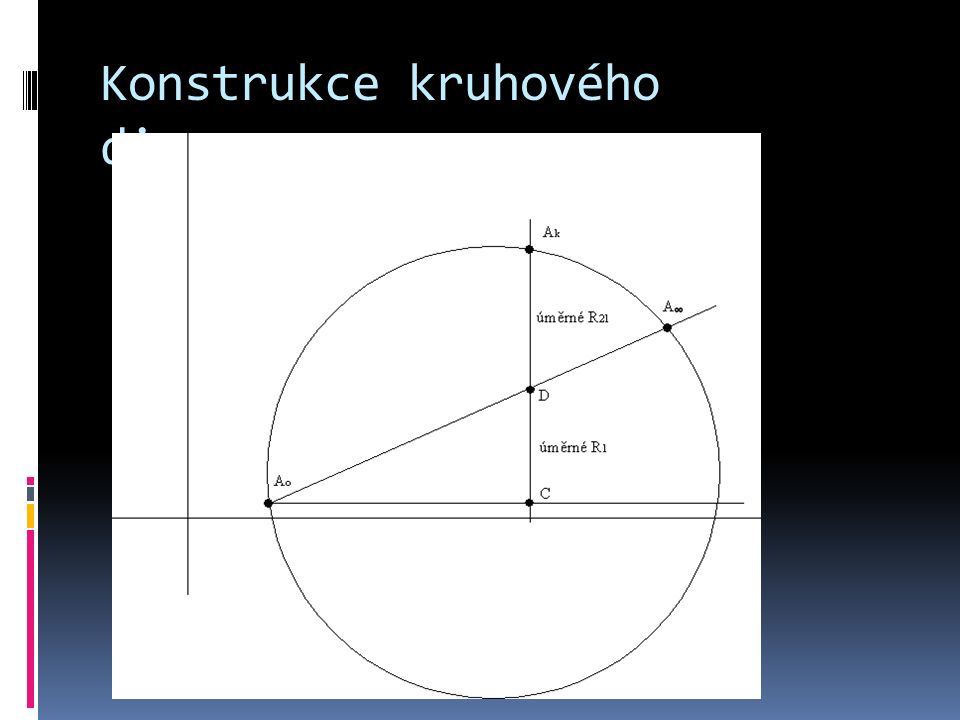
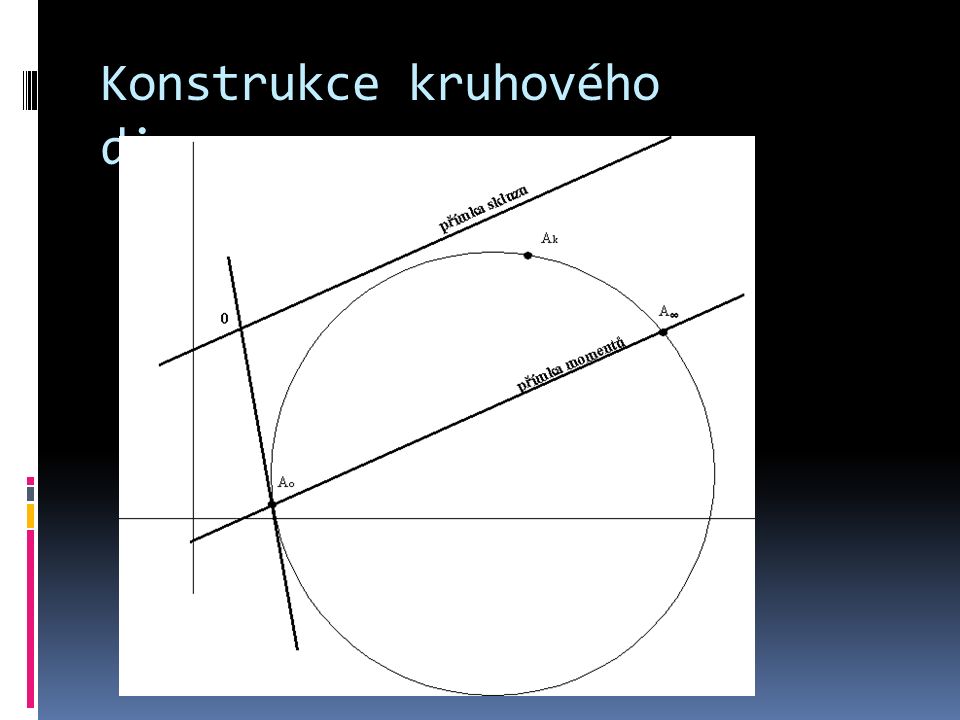
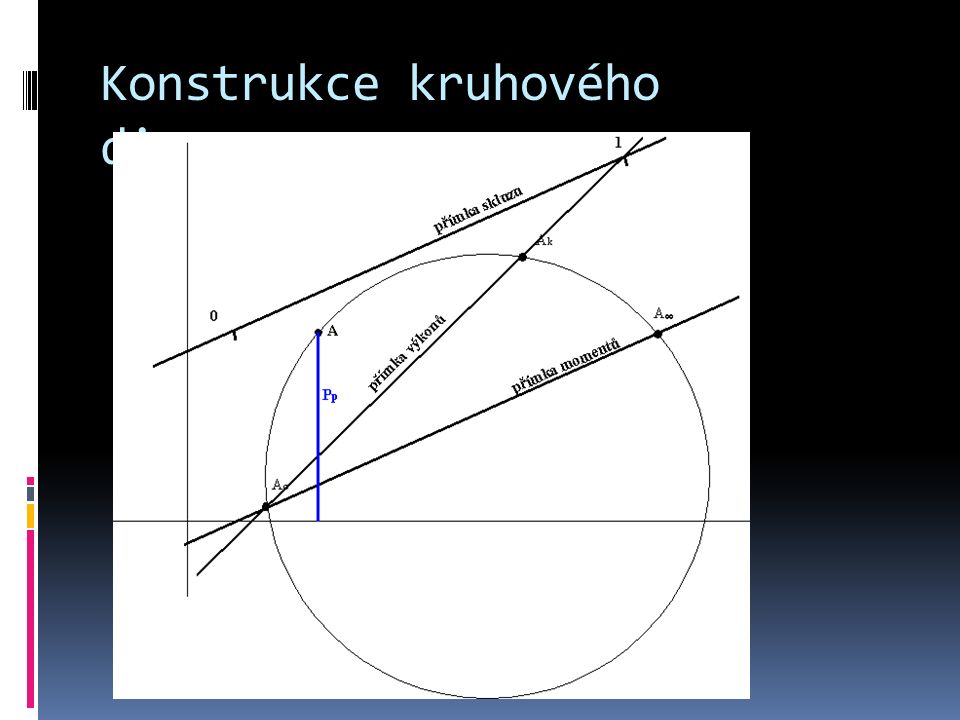
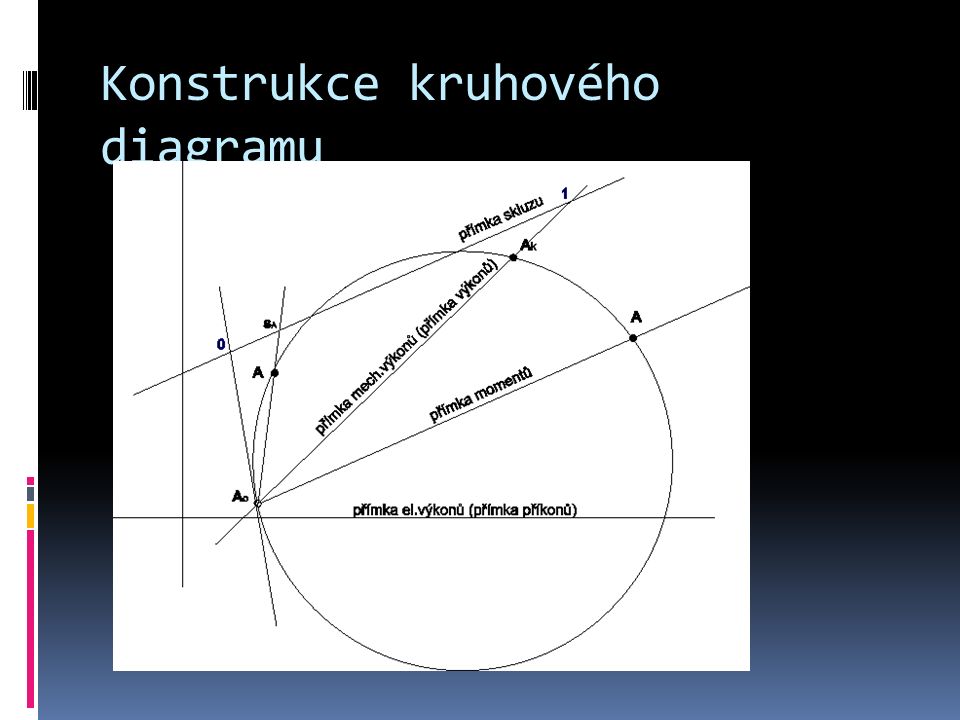
Konstrukce kruhového diagramu první bod kružnice

48
Konstrukce kruhového diagramu druhý bod kružnice

49
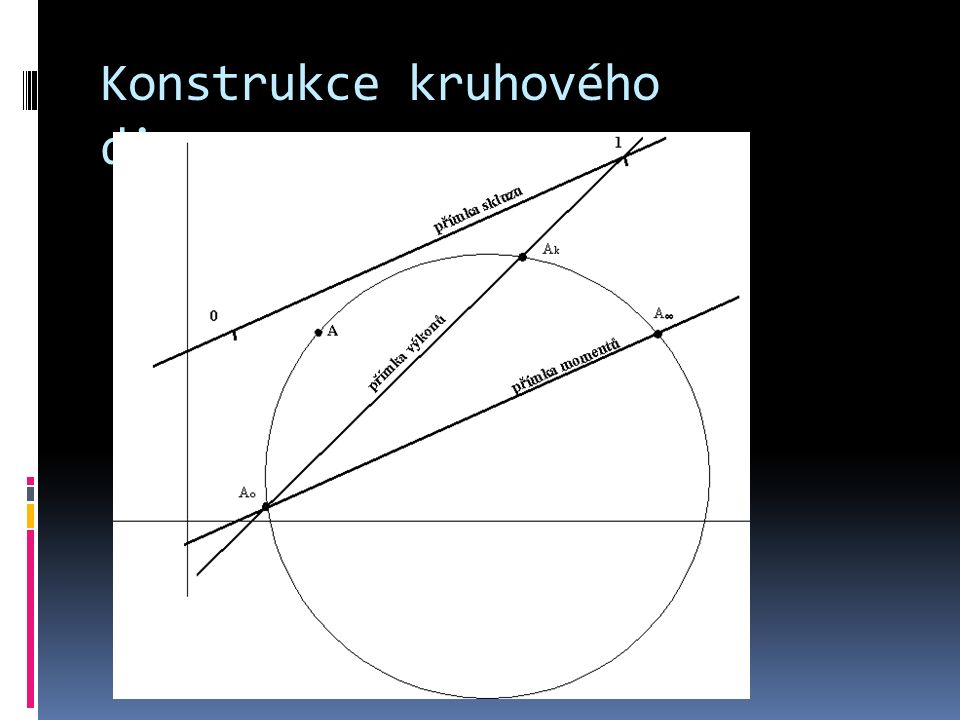
Konstrukce kruhového diagramu bod B považujeme za 3.bod kružnice

50
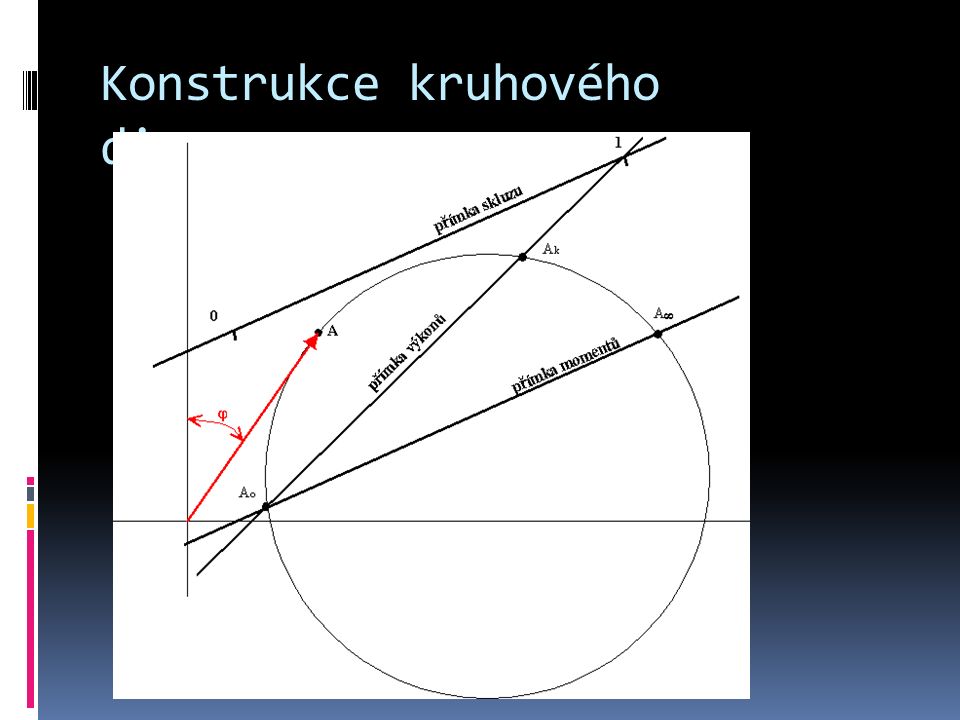
Konstrukce kruhového diagramu

51
úsečku AkC je třeba rozdělit v poměru odporů R1 a R21

52
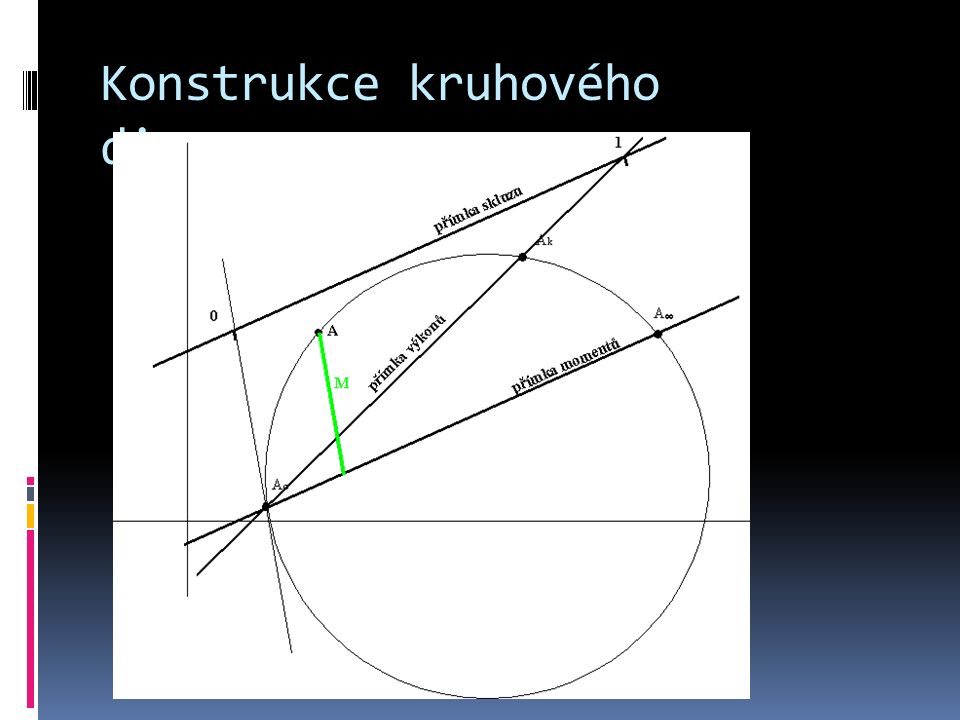
Konstrukce kruhového diagramu

54
kružnice se 3 základními body

55
Konstrukce kruhového diagramu

67
Rozběh asynchronního stroje V okamžiku připojení na síť odebírá motor ze sítě velký záběrný proud, který odpovídá proudu nakrátko I kn (stroj se v okamžiku připojení na síť netočí). Velikost záběrného proudu bývá podle konstrukce stroje v rozmezí cca 3÷7 násobku jmenovitého proudu.

68
Rozběh asynchronního stroje Velikost záběrného proudu může být pro síť nepříjemná, proto se snažíme velikost záběrného proudu omezit. Přímé připojení na síť bez omezení záběrného proudu je problematické od jmenovitého proudu motoru cca 3 kW.

69
Rozběh asynchronního stroje Snížení velikosti záběrného proudu lze dosáhnout přepínačem Y/D snížením napětí rotorovým spouštěčem frekvenčním řízením při rozběhu zvláštními kotvami nakrátko

70
Přepínač Y/D Motor se připojí na síť v zapojení do hvězdy a po rozběhu se přepne do trojúhelníku.

71
Přepínač Y/D Pro proud v zapojení do hvězdy platí a pro zapojení do trojúhelníku

72
Přepínač Y/D Stroj se tedy rozebíhá s třetinovým proudem, ale i s třetinovým momentem (M ~ U 2 ), a po rozběhu se přepne do trojúhelníku, kde pracuje s plným momentem a výkonem.
, a po rozběhu se přepne do trojúhelníku, kde pracuje s plným momentem a výkonem.")
73
Snížení napětí Snížením napětí se úměrně sníží záběrný proud, avšak moment klesne s kvadrátem změny napětí (při polovičním napětí bude poloviční záběrný proud, ale moment klesne na ¼). Snížení napětí se provádělo autotransformátorem, který se po rozběhu vyřadil z přívodu k motoru. V současné době se používají softstartéry. Řízení napětí je elektronické a lze nastavit parametry rozběhu podle požadovaných kriterií (konstantní proud a pod.).
..")
74
Rotorový spouštěč Při zvýšení rotorového odporu se zvýší impedance stroje a sníží proud. Skluz zvratu se zvýší, momentová charakteristika se stane měkčí a zvýší se záběrný moment, což je pro rozběh příznivé.

75
Rotorový spouštěč Stroj se rozebíhá s největším odporem v rotoru podle charakteristiky M1 s nejnižším záběrným proudem a postupně se při nastaveném skluzu vyřazují odpory v rotoru. Záběrný proud se tak udrží v nastaveném rozmezí.

76
Frekvenční řízení Pomocí frekvenčního měniče se postupně zvyšuje frekvence a stroj se rozbíhá plynule bez většího proudového nárazu.

77
Zvláštní kotvy Vhodným konstrukčním uspořádáním kotvy nakrátko lze dosáhnout stavu, že má kotva při rozběhu (při velkých skluzech) mnohem vyšší odpor než při jmenovitých otáčkách. Lze pak dosáhnout podobného efektu jako u rotorového spouštěče, tj. zvýšení záběrného momentu a snížení záběrného proudu.

78
Zvláštní kotvy Dvojitá (Boucherotova) klec Konstrukce klece : Stroj má dvě klece. Vrchní klec (R - blíž vzduchové mezeře) je z materiálu s vyšším odporem – mosaz, bronz. Spodní klec B pak má hluboké drážky a má menší odpor – hliník, měď. Na začátku rozběhu při vysoké rotorové frekvenci bude pro impedanci rotorové tyče rozhodující rekatance (X=2.π.f.L), kterou má vyšší klec hluboko v rotorovém mag.obvodu. Proud tedy poteče především vrchní odporovou klecí a rozběh proběhne tak, jakoby spodní klec neexistovala. Po rozběhu při nízké rotorové frekvenci začne o rozdělení proudu v klecích rozhodovat činný odpor, reaktance začne být zanedbatelná, rozhodující vliv převezme spodní klec s malým odporem. Momentová charakteristika je dána součtem charakteristiky odporové klece a klece s malým odporem.
 je z materiálu s vyšším odporem – mosaz, bronz. Spodní klec B pak má hluboké drážky a má menší odpor – hliník, měď. Na začátku rozběhu při vysoké rotorové frekvenci bude pro impedanci rotorové tyče rozhodující rekatance (X=2.π.f.L), kterou má vyšší klec hluboko v rotorovém mag.obvodu. Proud tedy poteče především vrchní odporovou klecí a rozběh proběhne tak, jakoby spodní klec neexistovala. Po rozběhu při nízké rotorové frekvenci začne o rozdělení proudu v klecích rozhodovat činný odpor, reaktance začne být zanedbatelná, rozhodující vliv převezme spodní klec s malým odporem. Momentová charakteristika je dána součtem charakteristiky odporové klece a klece s malým odporem..")
79
Zvláštní kotvy Dvojitá (Boucherotova) klec charakteristika odporové klece charakteristika hluboké klece charakteristika motoru
 klec charakteristika odporové klece charakteristika hluboké klece charakteristika motoru")
80
Zvláštní kotvy Vírová klec Konstrukce kotvy : Vírová klec má hluboké úzké drážky. Spodní část klece pak má vyšší rozptylovou indukčnost než vrchní část. Při rozběhu, kdy rozhoduje reaktance, bude mít spodní část klece vyšší impedanci než vrchní část, spodní částí téměř nepoteče proud, značně se zmenší využitý průřez tyče a tím stoupne její odpor. Rozběh pak proběhne podle schématu pro odporovou klec. Po rozběhu bude pro rozdělení proudu rozhodující odpor, proud se rozdělí rovnoměrně v celém průřezu a odpor klece značně klesne. Výsledkem je podobná momentová charakteristika jako u dvojité klece provázená opět snížením záběrného proudu.

Podobné prezentace