Stáhnout prezentaci
Prezentace se nahrává, počkejte prosím

1
Tvorba modelu prostředí pro mobilní roboty Petr Kolman

2
Úvod Tvorba CAD modelu v mobilní robotice –Zpracování dat senzorického měření –CAD model –Experiment

3
Zpracování dat senzorického měření Získání bodů v pravoúhlém souřadném systému

4
Zpracování dat senzorického měření Detekce úseček

5
CAD model Vložení bodů do C-sítě Detekce ploch Detekce hranic Vizualizace (VRML)
")
6
CAD model C-síť Podřízená, nadřízená a sousední množina Stromová struktura Rozlišení sítě

7
CAD model detekce ploch Měřený objektNaměřené body C-síť a RANSAC Proložení rovinou

8
CAD model detekce hranic Nalezená plochaKonvexní hranice Hraniční úsečkyNekonvexní hranice

9
CAD model vizualizace (VRML) Měřený objektVýsledný CAD model C-síť (triangulace)
 Měřený objektVýsledný CAD model C-síť (triangulace)")
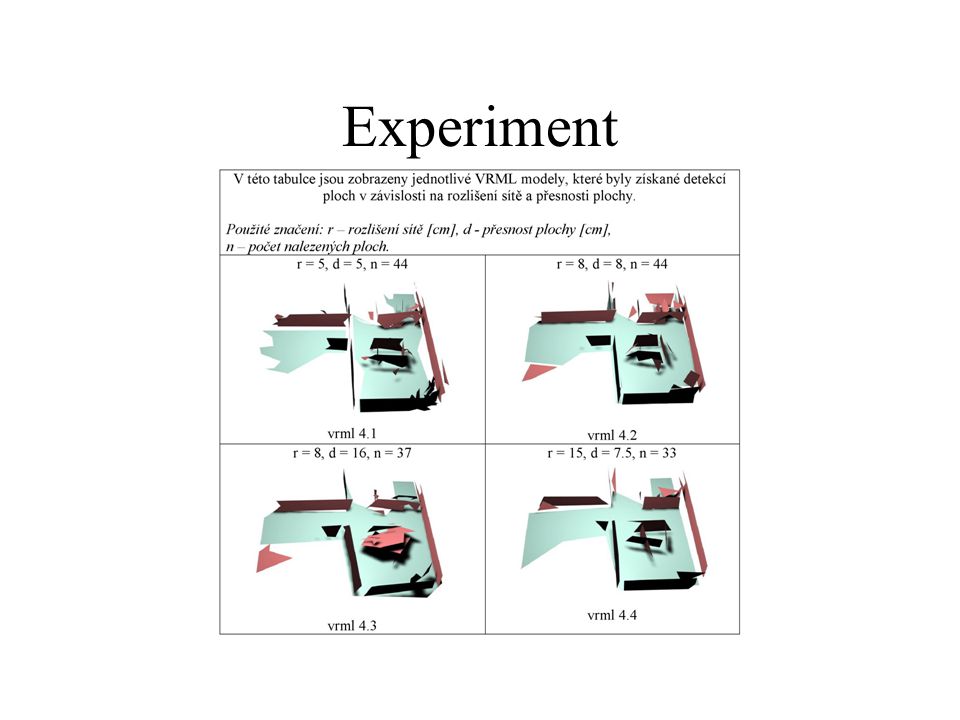
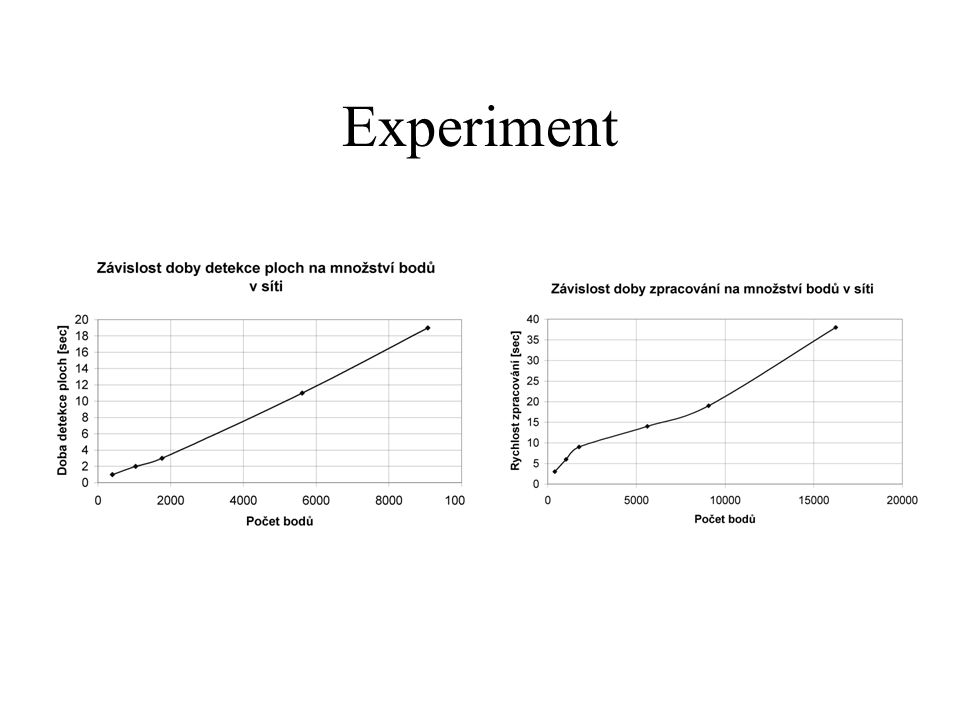
10
Experiment

13
Závěr Nová metoda detekce úseček Navržena datová struktura C-síť Implementace v C++ Další možnosti rozšíření

Podobné prezentace



>")




>")

>")








