Stáhnout prezentaci
1
FIIFEI-01 Nejdůležitější partie z fyziky I
2
Hlavní body Základní zákony
Kinematika a dynamika hmotného bodu Základní dynamické veličiny. Newtonovy zákony. Konzervativní pole – gravitační a elektrostatické Důsledky základních zákonů a zachování veličin Pohyb v prostoru. Vrhy. Kinematika a dynamika soustavy hmotných bodů Rozložení náboje na tělesech a pole v blízkém okolí Stacionární elektrický proud

3
Smysl této přednášky Zopakovat hlavní myšlenky a základní zákony, přednesené v předchozím semestru Ilustrovat jejich důsledky a upozornit na souvislosti a analogie napříč probranými podobory Vytvořit základ pro probrání dalších partií

4
Kinematika a dynamika hmotného bodu
Kinematika se zabývá pouze popisem pohybu a nepátrá po příčinách jeho změn. Dynamika se zabývá pohybem včetně příčin a zachováním veličin. Nejprve se zabýváme klasickou mechanikou. Studované objekty jsou nadmolekulárních velikostí a Pohybují se rychlostmi mnohem menšími než c. Hmotný bod má nenulovou hmotnost a zanedbatelné geometrické rozměry (jde hlavně o oddělení rotací, Kallysto, kulečníková koule, moucha, motýl ).
")
5
Kinematika I Kinematika se přednáší zvláště proto, že zde lze na známých a snadno pochopitelných představách a veličinách ilustrovat postupy řešení problémů ve složitějších oblastech. Například: Prvním krokem řešení problému je zjištění jeho skutečného rozměru a zavedení příslušných souřadnic. Obdobný aparát jako je používán u rovnoměrného přímočarého pohybu, který lze popsat jednorozměrně, lze aplikovat při popisu časového vývoje všech skalárních veličin, např. koncentrace.

6
Kinematika II Poloha hmotného bodu je určena polohovým vektorem = (x1, x2, x3). Průměrná rychlost v = s/t = celková dráha/čas. Obecně se v průběhu času mění velikost i směr. Okamžitá rychlost = d /dt . (vi = dxi/dt). V daném okamžiku má vždy směr tečný k dráze. Zrychlení = d /dt = d2 /dt2 . (ai = d2xi/dt2). Je to “rychlost rychlosti”. Směr vůči vektoru rychlosti může být obecně různý, podle okolností.
. V daném okamžiku má vždy směr tečný k dráze. Zrychlení = d /dt = d2 /dt2 . (ai = d2xi/dt2). Je to rychlost rychlosti . Směr vůči vektoru rychlosti může být obecně různý, podle okolností")
7
Kinematika III Vzhledem ke směru rychlosti je účelné rozložit zrychlení na tečné a normálové: Budiž = = v , potom
8
Kinematika IV Zde je poloměr křivosti. Je-li = , je obecně
a jedná se o pohyb přímočarý. Je-li hmotný bod v určitém místě vychýlen z přímočaré trajektorie, musí zde existovat nenulové normálové zrychlení směřující do okamžitého středu křivosti – dostředivé zrychlení. Čím menší je poloměr křivosti, tím ‘ostřejší’ je zatáčka a tím větší musí být normálové zrychlení, aby bylo příslušného zakřivení dráhy dosaženo.

9
Pohyb přímočarý I Souřadnou soustavu zavádíme tak, aby se jedna osa (např. x) ztotožňovala se směrem pohybu, potom vystačíme se skalární rychlostí v a se skalárním zrychlením a. Pozůstatkem vektorové povahy těchto veličin je jejich orientace. Pohyb rovnoměrný přímočarý v = dx/dt => x(t) = x0 + v t , kde x0 ≡ x(t=0) je integrační konstanta - počáteční podmínky.
 ztotožňovala se směrem pohybu, potom vystačíme se skalární rychlostí v a se skalárním zrychlením a. Pozůstatkem vektorové povahy těchto veličin je jejich orientace. Pohyb rovnoměrný přímočarý. v = dx/dt => x(t) = x0 + v t , kde x0 ≡ x(t=0) je integrační konstanta - počáteční podmínky")
10
Pohyb přímočarý II Přímočaré pohyby mohou mít i zrychlení vyššího řádu, ale často je nenulové jen z. řádu prvního: Pohyb přímočarý rovnoměrně zrychlený a = dv/dt => v(t) = v0 + a t , kde v0 ≡ x(t=0) je druhá integrační konstanta x(t) = x0 + v0 t + a t2/2 . Po druhé integraci přibyla další integrační konstanta. Počáteční podmínky jsou určeny dvěma nezávislými parametry x0 a v0. Na počátečních podmínkách záleží, zda se jedná o pohyb zrychlený nebo o pohyb zpomalený!
 = v0 + a t , kde v0 ≡ x(t=0) je druhá integrační konstanta. x(t) = x0 + v0 t + a t2/2 . Po druhé integraci přibyla další integrační konstanta. Počáteční podmínky jsou určeny dvěma nezávislými parametry x0 a v0. Na počátečních podmínkách záleží, zda se jedná o pohyb zrychlený nebo o pohyb zpomalený!")
11
Pohyb přímočarý III Závisí to na zrychlení a i na počáteční rychlosti v0! Je-li v0 > 0 znamená a > 0 pohyb zrychlený a < 0 pohyb zpomalený Ale je-li v0 < 0 je tomu naopak (!) a > 0 pohyb zpomalený a < 0 pohyb zrychlený
 a > 0 pohyb zpomalený. a < 0 pohyb zrychlený")
12
Pohyb křivočarý Normálová složka zrychlení musí být obecně alespoň někde nenulová a poloměr křivosti se může měnit. Speciální případ je pohyb po kružnici. Odehrává se v jedné rovině a poloměr křivosti je konstantní = r.

13
Časová závislost veličin nemechanických
Jedním z důvodů, proč se vyučuje již celkem probádaná kinematika jsou analogie kinematických a nemechanických veličin. Porozumění časových průběhů takových veličin je značně usnadněno díky tomu, že vzhledem ke každodenní zkušenosti je chápání mechanických veličin je relativně nejsnadnější. Příkladem může být radioaktivní rozpad.

14
Pohyb po kružnici I Pohyb rovnoměrný je konstantní a zrychlení směřuje neustále do středu otáčení je to tedy zrychlení dostředivé. Při zjednodušeném skalárním popisu ztotožníme osu otáčení s jednou z os souřadné soustavy (z). Hmotný bod prochází pravidelně kruhovou dráhu s = 2 r rychlostí o konstantní velikostí v. Doba jedné otáčky nebo-li perioda je T [s]. Počet otáček za jednotku času f = 1/T se nazývá frekvence f [s-1 Hz].
. Hmotný bod prochází pravidelně kruhovou dráhu s = 2 r rychlostí o konstantní velikostí v. Doba jedné otáčky nebo-li perioda je T [s]. Počet otáček za jednotku času f = 1/T se nazývá frekvence f [s-1 Hz]")
15
Pohyb po kružnici II Při popisu pohybů bodů v konstantní vzdálenosti od středu otáčení je výhodné požívat úhlové veličiny : ds = r d v = ds/dt = r d/dt = r = 2 r / T = 2 f = 2 / T Takto se zavádí úhlová rychlost [s-1], která je v tomto případě konstantní.

16
Pohyb po kružnici III Po integraci:
(t) = 0 + t s(t) = s0 + r t 0 nebo s0 jsou integrační konstanty opět dané počátečními podmínkami. Skutečná dráha a rychlost mohou záviset na čase: s(t) = r (t) v(t) = r (t)
 = 0 + t. s(t) = s0 + r t. 0 nebo s0 jsou integrační konstanty opět dané počátečními podmínkami. Skutečná dráha a rychlost mohou záviset na čase: s(t) = r (t) v(t) = r (t)")
17
Pohyb po kružnici IV Při rovnoměrném pohybu po kružnici :
Jsou průměty určitého bodu do kolmých os harmonické kmity. Tedy souřadnice hmotného bodu jsou : x(t)=cos (t) = cos(0 + t) y(t)=sin (t) = sin(0 + t) 0 se zde nazývá počáteční fáze Dostředivé zrychlení má konstantní velikost: ad = v2/r = 2r = v
=cos (t) = cos(0 + t) y(t)=sin (t) = sin(0 + t) 0 se zde nazývá počáteční fáze. Dostředivé zrychlení má konstantní velikost: ad = v2/r = 2r = v")
18
Pohyb po kružnici V Pohyb rovnoměrně zrychlený po kružnici.
Hmotný bod se pohybuje s konstantním tečným at nebo úhlovým zrychlením : = d /dt at = r Po integraci (t) = 0 + t (t) = 0 + 0 t + t2/2
 = 0 + t. (t) = 0 + 0 t + t2/")
19
Pohyb po kružnici VI Zda se jedná o pohyb rovnoměrně zrychlený nebo zpomalený, opět závisí na počátečních podmínkách, konkrétně počáteční úhlové rychlosti 0 , která určuje smysl počáteční rotace : Je-li 0 > 0 a > 0 jde o pohyb zrychlený. Při < 0 jde o pohyb zpomalený. Je-li 0 < 0 je tomu samozřejmě naopak.

20
*Pohyb po kružnici VII Protože rovina kruhové dráhy může mít různou polohu v prostoru, je nutné pro úplný popis pohybu použít vektorů Orientovaný úhel má směr normály ke kružnici, orientované tak, že je úhel vidět jako kladný nebo-li pravotočivý(!). Obdobně je definován i směr a orientace úhlové rychlosti a úhlového zrychlení .
. Obdobně je definován i směr a orientace úhlové rychlosti a úhlového zrychlení")
21
*Pohyb po kružnici VIII
Jedná-li se o pohyb rovnoměrně zrychlený je orientace vektorů stejná v případě pohybu zpomaleného je jejich orientace opačná. Vektorové vyjádření rychlosti a zrychlení:

22
Úvod do dynamiky Mechanika by byla neúplná, kdyby se nezabývala, důvody proč se tělesa dávají do pohybu, zrychlují, zpomalují nebo se zakřivuje jejich dráha. Pohybují-li se tělesa s nenulovým zrychlením, musí na ně působit nenulová výslednice sil. Dojít k tomuto jednoduchému závěru bylo obtížné, protože síly, jako například tření, nemusí být patrné a navíc některé tzv. dalekodosahové sily působí na dálku bez přímého kontaktu těles.

23
Hybnost Pohybový stav hmotného bodu lze popsat vektorem hybnosti definovaným jako: Význam hybnosti spočívá ve skutečnosti, že se zachovává, když je výslednice sil působících na hmotný bod nulová a mění se, když nulová není. Taková situace může nastat v důsledku interakce s jinými hmotnými body nebo se silovými poli.

24
Newtonovy zákony Isaac Newton ( ) geniálně shrnul poznatky klasické dynamiky do tří zákonů: Zákonu setrvačnosti Zákonu síly Zákonu akce a reakce Upřesnění těchto zákonů je nutné až za hranicemi klasické mechaniky, při vysokých rychlostech a v mikrosvětě .

25
Zákon setrvačnosti Nepůsobí-li na hmotný bod síla, pohybuje se rovnoměrně přímočaře nebo je v klidu. Přesněji: Je-li síla působící na hmotný bod nebo některá její složka nulová, je jeho hybnost nebo její příslušná složka konstantní. Silou se zde a dále obecně rozumí výslednice všech působících sil. V této formulaci jsou zahrnuty i speciální pohyby, kde se mění hmotnost, jako raketový.

26
Zákon síly I Síla působící na hmotný bod je rovna časové změně jeho hybnosti. Často, ale ne vždy (!) je splněn předpoklad, že hmotnost zůstává konstantní. Potom platí formulace jednodušší : Jednotkou síly je 1 newton : N = kg m s-2
 je splněn předpoklad, že hmotnost zůstává konstantní. Potom platí formulace jednodušší : Jednotkou síly je 1 newton : N = kg m s")
27
Zákon síly II Předchozí vztahy jsou vektorové. Platí tedy i v příslušných složkách. Například: Nenulová druhá složka síly je rovna změně druhé složky hybnosti v čase. Je-li třetí složka síly nulová, je třetí složka hybnosti konstantní, atd.

28
Zákon akce a reakce Působí-li těleso 1 na těleso 2 silou ,
působí i těleso 2 na těleso 1 silou Obě síly jsou stejně velké, ale opačně orientované: Každá působí na jiné těleso a proto se tyto síly spolu nedají obecně složit. Složit se dají jen když je mezi tělesy tzv. vazba, Tedy jsou spojena. Potom je účinek sil nulový.

29
Časový účinek síly - impuls
Za určitých okolností víme, že konstantní síla působí na jisté těleso po určitou dobu, potom integrací 2. Newtonova dostáváme přímo změnu jeho hybnosti : Změna hybnosti se tedy rovná impulsu síly. Je tedy důležité, jak dlouho síla působí. Vztah platí samozřejmě opět i ve složkách.

30
Dráhový účinek síly – práce I
Za určitých okolností víme, že konstantní síla působí na jisté těleso po určité dráze, potom známe jakou práci síla vykonala a tím také, jak se změnila celková energie tohoto tělesa. Proti předchozímu případu konstantní doby je nyní situace komplikovaná tím, že dráha může být 3D a síla může mít konstantní velikost, ale mění svůj směr. Takovou dráhu dělíme na potřebný počet rovných úseků a řešíme příslušný počet jednorozměrných případů.

31
Dráhový účinek síly – práce II
Předpokládejme konstantní sílu, působící na volnou částici konstantní hmotnosti v jednom směru (po přímce = ose x), v němž se částice pohybuje. V důsledku působení síly se stav částice změní (t1, x1, v1) -> (t2, x2, v2). * Použijeme vztahu pro souřadnici v čase t při rovnoměrně zrychleném pohybu :
, v němž se částice pohybuje. V důsledku působení síly se stav částice změní (t1, x1, v1) -> (t2, x2, v2). * Použijeme vztahu pro souřadnici v čase t při rovnoměrně zrychleném pohybu :")
32
*Dráhový účinek síly - práce III
Pro čas t2 tedy platí: Nyní dosadíme : a = F/m (t2 – t1) = (v2 – v1)/a = (v2 – v1)m/F Po úpravě :
 = (v2 – v1)/a = (v2 – v1)m/F. Po úpravě :")
33
Dráhový účinek síly – práce IV
Tedy : A = F x = v22 m/2 – v21 m/2 = Ek A je práce, kterou vykoná síla F na dráze x mv2 /2 = Ek je kinetická (pohybová) energie Obě veličiny mají rozměr energie a v SI jednotku 1 joule : J = Nm = kg m2 s-2 Obecně síla nemusí působit ve směru pohybu a práce jej její průmět do směru pohybu, tedy skalární součin :
 energie. Obě veličiny mají rozměr energie a v SI jednotku 1 joule : J = Nm = kg m2 s-2. Obecně síla nemusí působit ve směru pohybu a práce jej její průmět do směru pohybu, tedy skalární součin :")
34
* Dráhový účinek síly V Uvažujme opět jednorozměrný případ působení konstantní síly na kompaktní hmotný bod. V obecnějším případě bychom ztotožnili osu x se směrem posunu a uvažovali pouze složku síly do tohoto směru. Použili jsme: Lze ukázat:

35
Výkon působící síly Často je důležité, za jakou dobu došlo k vykonání určité práce. To charakterizujeme výkonem, který chápeme jako rychlost konání práce a definujeme analogicky jako ‘klasickou’ rychlost : Průměrný výkon : <P> = A/t Okamžitý výkon : P = dA/dt Jednotkou výkonu v SI je 1 watt W = Js-1

36
Gravitační síla a pole Věnujme se první dalekodosahové síle, síle gravitační. Jejím prostřednictvím na sebe hmotné body působí, aniž by byly v přímém vzájemném kontaktu. Na základě gravitačního působení funguje nebeská mechanika a gravitační zákon vznikl zobecněním dlouhodobých astronomických pozorování. Tyto představy se mění až v rámci obecné teorie relativity, která chápe gravitaci jako důsledek existence neinerciální vztažné soustavy.

37
*Keplerovy zákovy Tisíciletá astronomická pozorování a hlavně velmi přesná měření Tychona Braheho ( ) byla shrnuta Johannesem Keplerem ( ) do tří zákonů: Planety se pohybují kolem Slunce po elipsách, blízkých kružnicím. Slunce je v jejich společném ohnisku. Při pohybu určité planety je její plošná rychlost konstantní. Při srovnání drah dvou různých planet platí pro jejich doby oběhu a dlouhé periody:
 byla shrnuta Johannesem Keplerem ( ) do tří zákonů: Planety se pohybují kolem Slunce po elipsách, blízkých kružnicím. Slunce je v jejich společném ohnisku. Při pohybu určité planety je její plošná rychlost konstantní. Při srovnání drah dvou různých planet platí pro jejich doby oběhu a dlouhé periody:")
38
Newtonův gravitační zákon I
Keplerovy zákony byly později geniálně shrnuty do všeobecného gravitačního zákona Issacem Newtonem : Každé dva hmotné body na sebe působí přitažlivou silou, která působí ve směru jejich spojnice. Je přímo úměrná součinu jejich hmotností a nepřímo úměrná druhé mocnině jejich vzdálenosti.

39
Newtonův gravitační zákon II
Pro jednoduchost umístíme m1 do počátku a poloha m2 bude určena polohovým vektorem Potom síla působící na bod m2 v důsledku existence bodu m1 , resp. její velikost jsou :

40
Newtonův gravitační zákon II
Gravitačně na sebe působí libovolné hmotnosti. = Nm2kg-2 … je univerzální gravitační konstanta “-” znamená, že se vždy jedná o sílu přitažlivou Při vzájemném působení více hmotných bodů platí princip superpozice silové působení mezi dvěma hmotnými body nezávisí na rozložení jiných hmotností v jejich okolí, dokonce ani na hmotnosti ležící mezi nimi.

41
* Od Keplera k Newtonovi I
2. K. z. gravitační síla je centrální Plošná rychlost je definována: Zjevně úzce souvisí s momentem hybnosti Zachování plošné rychlosti je tedy ekvivalentní zachování momentu hybnosti. To podle druhé impulsové věty znamená, že moment gravitační síly je nulový. Tato nenulová síla tedy musí být buď paralelní nebo antiparalelní vzhledem k průvodiči. Protože je přitažlivá je antiparalelní.

42
* Od Keplera k Newtonovi II
2. K. z. gravitační síla je centrální Pro zjednodušený případ, kružnici, znamená konstantní plošná rychlost i konstantní úhlovou rychlost a tedy nulové úhlové zrychlení, což opět svědčí o nulové výslednici momentu sil a tedy i o tom, že gravitační síla je centrální. Pohyb po eliptické dráze je podobný jako pohyb na ‘horské dráze’ – těleso může zrychlovat i zpomalovat, ale zachovává se celková mechanická energie, tedy součet kinetické a potenciální energie a moment hybnosti.

43
* Od Keplera k Newtonovi III
3. K. z. gravitační síla ubývá se čtvercem vzdálenosti. Důkaz s použitím současného matematického aparátu je relativně snadný, ale z Newtonových zápisků není dodnes jasné, jak na něj přišel s prostředky, které byly známé v jeho době.

44
* Od Keplera k Newtonovi IV
Pro kružnici, jednoduše předpokládejme že platí: po úpravě: Podle 3. K.z. Musí být pravá strana konstantní a nesmí tedy záviset na r. To je splněno jen když je = 0.

45
Gravitační pole I Gravitační pole si představujeme jako informaci, kterou o sobě šíří hmotné body do svého okolí nese údaje o jejich hmotnosti a poloze šíří se rychlostí světla na tuto informaci reagují jiné zdroje stejného typu pole = hmotnosti tím, že na ně působí síla

46
Gravitační pole II Gravitační pole je pole vektorové. Mohli bychom ho plně charakterizovat, v každém bodě třemi složkami síly , která působí na nějakou testovací hmotnost m. Výhodnější je tuto sílu vydělit testovací hmotností, čímž získáme intenzitu , která na ní již nezávisí a je tedy jednoznačnou vlastností pole.

47
Gravitační pole III Intenzitu lze také chápat jako sílu, která by v daném bodě působila na jednotkovou hmotnost. Intenzita ale nemá rozměr síly, nýbrž síly dělené hmotností a tedy i jinou jednotku [N/kg].

48
Elektrická síla a pole Mnoho základních vlastností přírody existuje jako důsledek interakcí nabitých částic od chemické vazby po elektromagnetické záření. Pro jednoduchost se nejprve budeme zabývat náboji a poli, které jsou statická, tedy v klidu. Taková pole existují po dosažení rovnováhy. Detaily, jak k této rovnováze dojde, se elektrostatika nezabývá.

49
*Příklady elektrostatických jevů I
Hřeben, kterým jsme si právě prohrábli vlasy přitahuje malé kousky papíru. Způsobuje to dalekodosahová síla, která může být i odpudivá. Pozorované síly přiřazujeme vlastnosti částic, kterou nazýváme elektrický náboj. Většinou se tělesa projevují elektricky neutrálně. Aby na sebe tělesa silově působila docílíme: nabitím – přidáním nebo odebráním náboje přerozdělením náboje.

50
*Příklady elektrostatických jevů II
Přerozdělení náboje lze docílit působením na dálku, nazývaným indukce. To se někdy mylně považuje také za nabití. Nabití je možné jen vedením náboje neboli kondukcí a vyžaduje vodivý kontakt. Jím se na těleso přivede dodatečný náboj nebo se z něj naopak odvede. Pomocí materiálů, zvaných vodiče, lze náboje přenášet snadno. Pomocí jiných, zvaných izolátory, je to obtížné nebo nemožné.

51
Hlavní vlastnosti náboje
Protože existují přitažlivé i odpudivé elektrické síly, musí být náboje dvojího druhu, pozitivní a negativní. Shodné náboje se odpuzují a rozdílné přitahují. Náboje jsou kvantovány – existují jen v násobcích elementárního náboje e = C. Ve všech známých procesech náboje vznikají nebo zanikají pouze v párech (+q a -q), takže se celkový náboj zachovává. Náboj je invariantní vůči Lorentzově transformaci.
, takže se celkový náboj zachovává. Náboj je invariantní vůči Lorentzově transformaci")
52
Hlavní vlastnosti elektrostatických interakcí
Nabité částice na sebe působí silami. Síly : jsou dalekodosahové – zprostředkované elektrickým polem splňují princip superpozice Vzájemnou interakci dvou bodových nábojů v klidu popisuje Coulombův zákon.

53
Coulombův zákon I Mějme dva bodové náboje Q1 a Q2 ve vzdálenosti r od sebe. Potom je velikost síly, kterou na sebe navzájem působí rovna : F = k Q1 Q2 / r2 jednotkou náboje v soustavě SI je 1 Coulomb [C] k = 1/40 = Nm2/C2 0 = C2/ Nm2 je permitivita vakua

54
*Coulombův zákon II Protože síly jsou vektory, je důležitá i informace o jejich směru. Úplnou informaci dostaneme, umístíme-li bodový náboj Q1 do počátku a poloha druhého Q2 bude určena polohovým vektorem . Pro sílu, působící na Q2 platí : síly působí ve směru spojnice síly působící na oba náboje jsou akce a reakce positivní síla je odpudivá

55
*Coulombův zákon III Nejobecnější vztah dostaneme, popíšeme-li polohu každého náboje Qi (i=1, 2) jeho vlastním polohovým vektorem . Potom je síla působící na náboj Q2 rovna : Protože síla závisí jen na rozdílu polohových vektorů, je poloha počátku libovolná.
 jeho vlastním polohovým vektorem . Potom je síla působící na náboj Q2 rovna : Protože síla závisí jen na rozdílu polohových vektorů, je poloha počátku libovolná")
56
Srovnání elektrostatického a gravitačního působení
Formálně je Coulombův zákon podobný Newtonovu gravitačnímu zákonu. ale elektrostatická síla je ~ 1042 (!) krát silnější tak slabá síla přesto dominuje ve vesmíru, protože hmota je obvykle neutrální nabít nějaké těleso znamená nepatrně porušit obrovskou rovnováhu
 krát silnější. tak slabá síla přesto dominuje ve vesmíru, protože hmota je obvykle neutrální. nabít nějaké těleso znamená nepatrně porušit obrovskou rovnováhu")
57
Koncepce elektrického pole
Je-li náboj umístěn v určitém bodě prostoru, “vysílá” kolem sebe informaci o své pozici, polaritě a velikosti. Tato informace se šíří rychlostí světla. Může být “zachycena” jiným nábojem. Výsledkem interakce náboje a elektrostatického pole je silové působení.

58
Elektrická intenzita I
Elektrické pole by bylo možné popsat pomocí vektoru síly , která by působila na jistý testovací náboj Q v každém bodě, který by nás zajímal. Tento popis by ale závisel na velikosti a polaritě testovacího náboje, který by se musel uvádět jako doplňující informace. Jinak by byl popis nejednoznačný.

59
Elektrická intenzita II
Vydělením testovacím nábojem je definována elektrická intenzita, která již je jednoznačnou funkcí popisovaného pole : Číselně je rovna síle, která by v daném bodě působila na jednotkový kladný náboj. Intenzita ale nemá rozměr pouhé síly.

60
Elektrická intenzita III
Vydělením testovacím nábojem se informace, jak pole tento náboj “cítí” stává objektivní informací o vlastnosti pole. Je nutné si uvědomit, že vzhledem k dvojí polaritě nábojů, působí síly vyvolané stejným polem na náboje různých polarit silami dokonce opačně orientovanými.

61
Elektrické siločáry Elektrické pole je trojrozměrné vektorové pole, které se v obecném případě obtížně znázorňuje. V jednoduchých symetrických příkladech, lze užít siločáry. Jsou to křivky, které jsou v každém bodě tečné k vektorům elektrické intenzity, čili se nemohou protnout! Velikost intensity se znázorňuje délkou nebo hustotou těchto siločar. Kladný náboj nepatrné hmotnosti by se pohyboval po určité siločáře, náboj záporný také, ale v opačném smyslu.

62
*Tok elektrické intenzity
Tok elektrické intenzity je definován jako : . Popisuje množství elektrické intenzity , která proteče kolmo ploškou , která je tak malá, aby se intenzita na ní dala považovat za konstantní a je popsána svým vnějším normálovým vektorem Zopakujme si skalární součin.

63
*Gaussova věta I Celkový tok elektrické intenzity skrz libovolnou uzavřenou plochu je roven celkovému náboji, který plocha obepíná dělený permitivitou vakua Věta je ekvivalentní tvrzení, že siločáry elektrického pole začínají v kladných a končí v záporných nábojích.

64
*Gaussova věta II V nekonečnu mohou siločáry začínat i končit.
Gaussova věta platí protože intenzita klesá s r2, což je v toku intenzity kompenzováno růstem plochy jako r2. Skalárním součinem je ošetřena vzájemná orientace siločar a plošek.

65
*Gaussova věta III Neuzavírá-li plocha žádný náboj, musí siločáry, které do objemu vstoupí zase někde vystoupit. Je-li celkový uzavřený náboj kladný více siločar vystoupí než vstoupí. Je-li naopak celkový uzavřený náboj záporný více siločar vstoupí než vystoupí. Pozitivní náboje jsou zdroji a negativní propadly. Nekonečno může být i zdrojem i propadlem.

66
*Hustota náboje V reálných situacích obvykle nepracujeme s bodovými náboji, ale s nabitými tělesy. Potom je vhodné zavést nábojovou hustotu, tedy náboj na jednotku objemu, plochy nebo délky, podle symetrie problému. Hustota je obecně funkcí polohy. Jednoduše je použitelná v případě, že tělesa jsou nabita rovnoměrně, jako v případě nabité vodivé roviny.

67
*Gaussova věta VI Gaussova věta může být považována za základ elektrostatiky podobně jako Coulombův zákon a dokonce je obecnější! Gaussova věta je užitečná : pro teoretické úvahy nebo v případech speciální symetrie například při výpočtu pole: bodového náboje nekonečného drátu nabitého s konstantní hustotou nekonečné roviny nabité s konstantní hustotou

68
Konzervativní pole Gravitační pole pro hmotné částice, podobně jako elektrostatické pole pro částice nabité, jsou příkladem konzervativních polí. Jsou definovány tak, že je nich celková vykonaná práce při přesunu částice po libovolné uzavřené křivce rovna nule.

69
Existence potenciálu Z definice konzervativního pole, lze ukázat, že práce potřebná pro přesun nabité částice v elektrostatickém poli (nebo hmotné částice v poli gravitačním) z bodu A do bodu B, nezávisí na cestě, ale pouze na jisté skalární vlastnosti pole v těchto dvou bodech. Tato vlastnost se nazývá elektrický potenciál e nebo gravitační potenciál g.
 z bodu A do bodu B, nezávisí na cestě, ale pouze na jisté skalární vlastnosti pole v těchto dvou bodech. Tato vlastnost se nazývá elektrický potenciál e nebo gravitační potenciál g")
70
Práce vykonaná na částici I
Přesune-li například nějaký vnější činitel částici s nábojem q v elektrostatickém poli nebo hmotností m v gravitačním poli z jistého bodu A do bodu B, vykoná podle definice potenciálu práci : W(A->B) q[e(B)-e(A)] nebo W(A->B) m[g(B)-g(A)]
 q[e(B)-e(A)] nebo. W(A->B) m[g(B)-g(A)]")
71
Práce vykonaná na částici II
Pro potenciální energii částice obecně platí : Ep(B)=Ep(A)+W(A->B) Tuto definici srovnáme s předchozími vztahy : W(A->B)=q[e(B)-e(A)] =Ep(B)-Ep(A) W(A->B)=m[g(B)-g(A)] =Ep(B)-Ep(A) Vykoná-li vnější činitel na částici kladnou práci, zvýší tím její potenciální energii Ep definovanou :
=Ep(A)+W(A->B) Tuto definici srovnáme s předchozími vztahy : W(A->B)=q[e(B)-e(A)] =Ep(B)-Ep(A) W(A->B)=m[g(B)-g(A)] =Ep(B)-Ep(A) Vykoná-li vnější činitel na částici kladnou práci, zvýší tím její potenciální energii Ep definovanou :")
72
Práce vykonaná na částici III
Ve většině praktických případů nás zajímá rozdíl potenciálů dvou míst. U elektrického pole o něm hovoříme jako o napětí U : UBA (B)-(A) Pomocí napětí je vykonaná práce : W(A->B)=q UBA
-(A) Pomocí napětí je vykonaná práce : W(A->B)=q UBA")
73
Práce vykonaná na částici IV
Pro práci vykonanou vnějším činitelem na nabité částici tedy platí : W=q[(B)-(A)]=Ep(B)-Ep(A)=qUBA Je důležité si uvědomit principiální rozdíly : Mezi potenciálem, což je vlastnost pole, potenciální energií částice v poli a napětím. Mezi prací vykonanou vnějším činitelem nebo polem
-(A)]=Ep(B)-Ep(A)=qUBA. Je důležité si uvědomit principiální rozdíly : Mezi potenciálem, což je vlastnost pole, potenciální energií částice v poli a napětím. Mezi prací vykonanou vnějším činitelem nebo polem")
74
Důsledky existence potenciálu
Díky existenci potenciálu je možné přejít od popisu příslušného pole pomocí vektorů intenzit k popisu pomocí skalárních potenciálů Stačí nám jen třetina informací Superpozice vede na prostý aritmetický součet Některé výrazy lépe konvergují

75
*Jednotky Jednotkou potenciálu i napětí U je 1 Volt.
[ ] = [Ep/q] => V = J/C [E] = [/d] = V/m [] = [k q/r] = V => [k] = Vm/C => [0] = CV-1m-1

76
Obecný vztah Obecný vztah je analogický u elektrického i gravitačního pole: Gradient skalární funkce f v určitém bodě je vektor : Který směřuje do směru nejrychlejšího růstu funkce f. Jeho velikost je rovna změně hodnoty funkce f, kdybychom se v tomto směru přesunuli o jednotkovou vzdálenost.

77
Pohyb v prostoru Při obecném pohybu v prostoru je nutné pracovat s vektory a operace se provádějí ve vhodných souřadnicích. Zpravidla se daří problém zjednodušit, když využijeme symetrie a snížíme počet složek, ve kterých dochází ke změně. Příkladem jsou vrhy v blízkosti povrchu Země, odehrávající se ve svislé rovině x,z.

78
Vrhy U všech vrhů předpokládáme:
Zrychlení působí svisle dolů a má velikost tíhového zrychlení. Je vhodné ztotožnit svislý směr s jednou osou, například : = (0, 0, -g) pohyb začíná z bodu = ( x0, y0, z0) s počáteční rychlostí = (vx0, vy0, vz0) Z pedagogických důvodů se vrhy dělí podle počátečních podmínek na speciální případy.
 pohyb začíná z bodu = ( x0, y0, z0) s počáteční rychlostí = (vx0, vy0, vz0) Z pedagogických důvodů se vrhy dělí podle počátečních podmínek na speciální případy")
79
Vrh svislý I Počáteční podmínky:
= (0, 0, -g) = (x0, y0, z0), zpravidla volíme x0= y0 = 0 = (0, 0, vz0) Smysl má soustředit se jen na svislou osu z : vz(t) = vz0 – g t z(t) = z0 + vz0 t – g t2/2
 = (x0, y0, z0), zpravidla volíme x0= y0 = 0. = (0, 0, vz0) Smysl má soustředit se jen na svislou osu z : vz(t) = vz0 – g t. z(t) = z0 + vz0 t – g t2/")
80
*Vrh svislý II Speciální případ je volný pád, je-li vz0 = 0.
Častý případ je vrh vzhůru : vz0 > 0, z0 = 0. Rychlost se zmenšuje , až dosáhne nuly v čase tm = vz0/g v horní úvrati z(tm) = v2z0/2g Potom těleso padá a rychlost je záporná. Na zem dopadne v čase tn, který je řešením rovnice z(tn) = tnvz0 –gt2n /2 = 0 => tn = 2vz0/g = 2tm. Rychlost dopadu v(tn) = – vz0.
 = v2z0/2g. Potom těleso padá a rychlost je záporná. Na zem dopadne v čase tn, který je řešením rovnice z(tn) = tnvz0 –gt2n /2 = 0 => tn = 2vz0/g = 2tm. Rychlost dopadu v(tn) = – vz")
81
Vrh vodorovný I Počáteční podmínky ve vhodné s. soustavě:
= (0, 0, -g) = (x0, y0, z0), zpravidla volíme x0= y0 = 0 = (vx0, 0, 0) Pohyb je nyní nutno popsat ve dvou osách. Ve směru svislém se jedná o volný pád: vz(t) = – g t z(t) = z0 – gt2 /2
 = (x0, y0, z0), zpravidla volíme x0= y0 = 0. = (vx0, 0, 0) Pohyb je nyní nutno popsat ve dvou osách. Ve směru svislém se jedná o volný pád: vz(t) = – g t. z(t) = z0 – gt2 /")
82
*Vrh vodorovný II Ve směru vodorovném o pohyb rovnoměrný. Rychlost je konstantní protože zrychlení má nenulovou jen svislou složku: vx(t) = vx0 x(t) = x0 + vx0 t Pohyb (v obou osách) je zpravidla současně ukončen dopadem hmotného bodu na zem.
 = vx0. x(t) = x0 + vx0 t. Pohyb (v obou osách) je zpravidla současně ukončen dopadem hmotného bodu na zem")
83
Vrh šikmý I Souřadnou soustavu zachováme. Poč. podmínky:
= (0, 0, -g) = (x0, y0, z0), zpravidla volíme x0= y0 = 0 = (vx0, 0, vz0) Počáteční rychlosti jsou spolu vázány: vx0 = v0 cos() vz0 = v0 sin() Těleso je tedy vrženo počáteční rychlostí v0 pod elevačním úhlem s vodorovnou rovinou.
 = (x0, y0, z0), zpravidla volíme x0= y0 = 0. = (vx0, 0, vz0) Počáteční rychlosti jsou spolu vázány: vx0 = v0 cos() vz0 = v0 sin() Těleso je tedy vrženo počáteční rychlostí v0 pod elevačním úhlem s vodorovnou rovinou")
84
*Vrh šikmý II Pohyb je opět nutno popsat ve dvou osách. Ve svislé jde o svislý vrh: vz(t) = vz0 – g t = v0 sin() – g t z(t) = z0 + v0 sin() t – g t2 /2 Ve vodorovné o rovnoměrný pohyb vx(t) = vx0 = v0 cos() x(t) = x0 + v0 cos() t
 = z0 + v0 sin() t – g t2 /2. Ve vodorovné o rovnoměrný pohyb. vx(t) = vx0 = v0 cos() x(t) = x0 + v0 cos() t")
85
*Vrh šikmý III Pohyb je opět ukončen dopadem na zem. Kdy
k němu dojde je dáno počátečními podmínkami. Například pohyb zem-zem z0 = 0 , zk = 0 : z(tk) = v0 sin() t – g t2 /2 = (v0 sin() – g/2 t) t =0 tk1 = 0 … počátek pohybu tk2 = 2v0 sin() /g … konec pohybu Dolet ve vodorovné rovině : x (tk2) = x0 + 2v20 sin()cos()
 = v0 sin() t – g t2 /2 = (v0 sin() – g/2 t) t =0. tk1 = 0 … počátek pohybu. tk2 = 2v0 sin() /g … konec pohybu. Dolet ve vodorovné rovině : x (tk2) = x0 + 2v20 sin()cos()")
86
*Vrh šikmý IV Horní úvrať (maximum výšky) :
vz(tm) = vz(t) = v0 sin() – g tm = 0 tm = v0 sin()/ g Dochází k ní v čase poloviny celkového letu xm(t) = x0 + v20 sin()cos() zm(t) = v20 sin2()/2g
 = vz(t) = v0 sin() – g tm = 0. tm = v0 sin()/ g. Dochází k ní v čase poloviny celkového letu. xm(t) = x0 + v20 sin()cos() zm(t) = v20 sin2()/2g")
87
Soustava hmotných bodů I
Dosud jsme se zabývali mechanikou hmotného bodu. Tato abstrakce se hodila pro pohodlnou definici základních veličin mechaniky, ale při splnění příslušných předpokladů ji lze použít i k řešení skutečných problémů. Obecný sytém lze chápat jako soustavu hmotných bodů, které spolu jistým způsobem interagují.

88
První věta impulsová I Na i-tý hmotný bod působí výslednice sil, kterou můžeme rozdělit na výslednici vnitřních sil, pocházejících z iterakce s hmotnými body, které jsou součástí systému a výslednici sil vnějších. Podle 2. Nz.:

89
První věta impulsová II
Celková hybnost systému je vektorový součet všech hybností: Potom platí:

90
První věta impulsová III
Časová změna celkové hybnosti je rovna výslednici vnějších sil. Jinými slovy celkovou hybnost mohou ovlivnit pouze vnější síly. Je to významný důsledek platnosti zákona akce a reakce. Součet všech vnitřních sil přes celý systém je totiž roven nule :

91
Moment hybnosti – základní zákony zachování
Z dynamiky hmotného bodu je zřejmé, že je-li výslednice působících sil nulová, zachovává hmotný bod svoji hybnost a kinetickou energii. Přímočarý pohyb je možné chápat jako okamžitou rotaci kolem počátku a definovat rotační pohybový stav hmotného bodu – moment hybnosti: I tato veličina se zachovává. K zachování může dojít dokonce i při působení nenulové síly, pokud má speciální směr; je tzv. centrální.

92
*Dynamika rotačních pohybů I
Síla uvádí tělesa do translačních i rotačních pohybů, ale u rotačních je důležité jakým způsobem působí. Na pevné nehmotné vodorovné tyčce je hmotný bod m ve vzdálenosti r od vodorovného pantu, kolem kterého se tyčka může volně otáčet. Ve vzdálenosti od tohoto pantu se snažíme působit silou F, abychom vykompenzovali gravitační působení a tyčka byla v rovnováze.

93
*Dynamika rotačních pohybů II
Naše síla vyrovnává svislou tíhu, tedy k rovnováze přispěje pouze její svislá složka, kolmá k (vodorovné) tyčce : Fk = Fsin(). Experimentálně lze ověřit, že: Tíha hmotného bodu je podepřena současně naší silou a silou v pantu : G = F0 + Fk . Rozložení tíhy je nepřímo úměrné vzdálenosti podpůrných sil : F0 r = Fk ( - r) . Tedy : G r = Fk
 tyčce : Fk = Fsin(). Experimentálně lze ověřit, že: Tíha hmotného bodu je podepřena současně naší silou a silou v pantu : G = F0 + Fk . Rozložení tíhy je nepřímo úměrné vzdálenosti podpůrných sil : F0 r = Fk ( - r) . Tedy : G r = Fk ")
94
Dynamika rotačních pohybů III
Je patrné, že pro otáčivý účinek síly je kromě její velikosti rozhodující i její vzdálenost od osy otáčení a její směr vzhledem ke směru působiště – osa. Souhrnně je otáčivý účinek popsán momentem síly : počátek je v průsečíku osy a roviny otáčení.

95
Dynamika rotačních pohybů IV
Předpokládejme konstantní moment síly. Potom s použitím druhého Newtonova zákona můžeme psát : Moment síly je tedy roven časové změně momentu hybnosti. Toto je nejobecnější formulace druhého Newtonova zákona pro rotaci.

96
Dynamika rotačních pohybů V
V případě, že těleso má konstantní hmotnost a geometrii, je výhodné zavést moment setrvačnosti vzhledem k příslušné ose otáčení : J = mi r2i a psát : Význam tohoto vztahu ilustrujme na příkladu podobnému příkladu předchozímu :

97
*Dynamika rotačních pohybů VI
Hmotný bod m, leží na pevné nehmotné tyčce ve vzdálenosti r od osy otáčení, nyní svislé : Síla F působí ve vzdálenosti od této osy a leží ve vodorovné rovině a opět svírá s tyčkou úhel : S využitím předchozího : Fk = F sin() = r m a = r2 m . Jsou-li na tyčce dva hmotné body, můžeme ukázat aditivnost momentu setrvačnosti : F sin() = r1 m1 a1 + r2 m2 a2 = (r21m1 + r22m2) .
 = r m a = r2 m . Jsou-li na tyčce dva hmotné body, můžeme ukázat aditivnost momentu setrvačnosti : F sin() = r1 m1 a1 + r2 m2 a2 = (r21m1 + r22m2)")
98
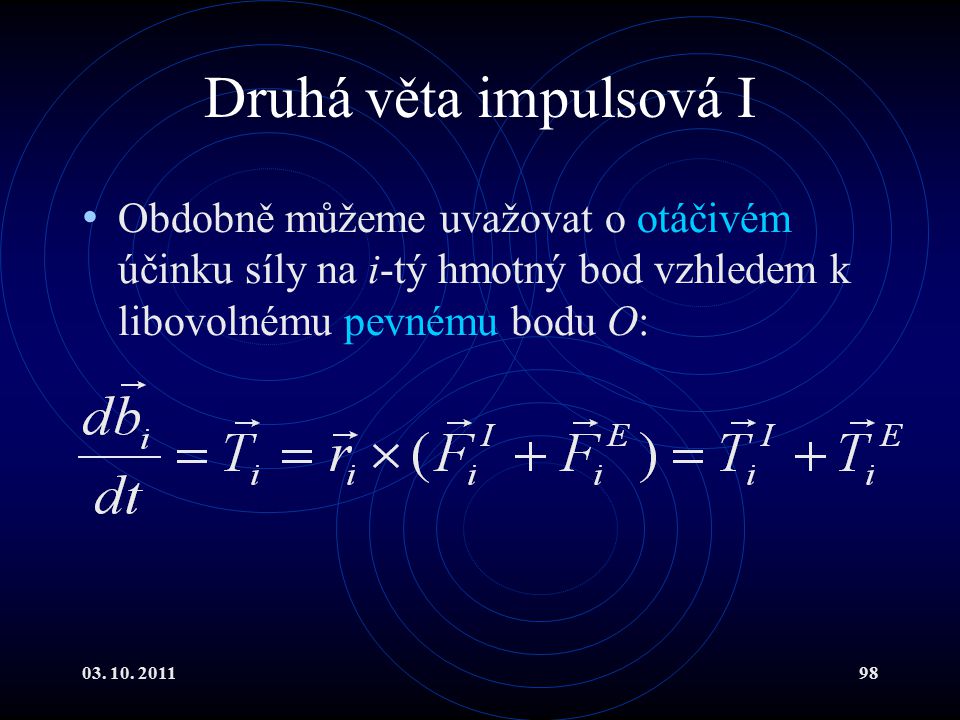
Druhá věta impulsová I Obdobně můžeme uvažovat o otáčivém účinku síly na i-tý hmotný bod vzhledem k libovolnému pevnému bodu O:
99
Druhá věta impulsová II
Celkový moment hybnost systému je vektorový součet všech momentů hybností uvažovaných k témuž pevnému bodu O: Při sčítání přes celý systém opět využíváme důsledku zákona akce a reakce.

100
Druhá věta impulsová III
Časová změna celkového momentu hybnosti je rovna výslednici momentů vnějších sil, vzhledem k pevnému bodu O:

101
Důsledky impulsových vět
Je-li výslednice vnějších sil, působících na systém nulová, zachovává se celková hybnost systému. Je-li výslednice momentů vnějších sil, působících na systém nulová, zachovává se celkový moment hybnosti systému. Vnější síly mají obecně translační i rotační účinek. Je důležité, jak působí vzhledem k hmotnému středu.

102
Příklad – ráz těles I Centrální ráz – hmotné body jsou kuličky, na které nepůsobí žádné vnější síly. Před srážkou se (proti sobě) pohybují dvě kuličky mi, rychlostmi vi. Po srážce mají rychlosti ui. Podle I.VI se vždy zachovává celková hybnost: Ráz se odehrává mezi dvěma mantinely – dokonale nepružný u1 = u2 = u , kdy se tělesa po rázu pohybují společně, část mechanické energie se mění na jinou formu: Dokonale pružný – zachovává se i celková kinetická energie. Přibude podmínka :
 pohybují dvě kuličky mi, rychlostmi vi. Po srážce mají rychlosti ui. Podle I.VI se vždy zachovává celková hybnost: Ráz se odehrává mezi dvěma mantinely – dokonale nepružný u1 = u2 = u , kdy se tělesa po rázu pohybují společně, část mechanické energie se mění na jinou formu: Dokonale pružný – zachovává se i celková kinetická energie. Přibude podmínka :")
103
*Ráz těles II po vydělení rovnic dojdeme k řešení

104
Hmotný střed I Celou soustavu lze reprezentovat těžištěm, přesněji hmotným středem , ve kterém je soustředěna celá hmotnost soustavy Získáme ho integrací rovnice : Definice těžiště platí i ve složkách : , ,

105
Hmotný střed II Hmotný střed:
Nezávisí na volbě souřadné soustavy. Ale její vhodná volba může značně usnadnit výpočet. Je v průsečíku prvků symetrie. S ohledem na to volíme souřadnou soustavu. U těles s rotační symetrií lze využít Pappova teorému : dráha těžiště x plocha = objem.

106
Hmotný střed III Uvažujme nový počátek v těžišti Potom :
Této rovnosti lze využít k důkazu důležitých vlastností těžiště : rotace systému kolem libovolné osy, procházející těžištěm a pohyb posuvný neboli translační tohoto těžiště v prostoru jsou pohyby na sobě nezávislé.

107
Hmotný střed IV Druhá věta impulsová tedy platí nejen vztáhneme-li ji k libovolnému pevnému bodu, ale také k těžišti systému, které se může dokonce obecně pohybovat. Je to ale jediný pohyblivý bod vzhledem k němuž tato věta platí.

108
Dokonale tuhé těleso I Rozložení vnějšího účinku na translační a rotační závisí na dodatečných podmínkách. Některé systémy lze považovat za dokonale tuhé. Znamená to, že žádným působením se nemohou měnit vzdálenosti mezi hmotnými body. Takový systém tedy není možné deformovat. V praxi to znamená, že deformace, které jsou u reálných materiálů přítomny vždy, lze z hlediska řešení daného problému zanedbat.

109
Dokonale tuhé těleso II
Ani translační ani rotační silové působení na dokonale tuhé těleso se nezmění když: do libovolného bodu umístíme dvě síly stejně velké, ale opačně orientované. libovolnou sílu posuneme kamkoli po přímce jejího působení. na libovolnou přímku umístíme dvě síly stejně velké, ale opačně orientované.

110
Dokonale tuhé těleso III
Účinek síly, která působí v přímce procházející těžištěm, je čistě translační Účinek dvojice stejných, opačně orientovaných sil, působících v libovolných paralelních přímkách, je čistě rotační.

111
Dokonale tuhé těleso IV Steinerova věta I
U tuhých těles je výhodné popsat rozložení hmotnosti pomocí momentu setrvačnosti : J = mi r2i Z vlastnosti těžiště plyne Steinerova věta : kde Ja je moment setrvačnosti vůči ose, vzdálené a od těžiště a Jt je m.s. vůči ose procházející těžištěm, která je s ní paralelní

112
*Dokonale tuhé těleso V Steinerova věta II
Polohový vektor i-tého bodu lze vyjádřit pomocí jeho polohového vektoru v těžišťové soustavě : Tedy : Prostřední člen je z vlastnosti těžiště roven nule.

113
Dokonale tuhé těleso VI Steinerova věta III
Je patrné, že ze všech paralelních os je moment setrvačnosti nejmenší vůči ose procházející těžištěm. Je-li výslednice všech momentů sil, které působí na DTT nulová, rotuje těleso rovnoměrně (s konstantní ) kolem osy, procházející těžištěm nebo je v klidu.
 kolem osy, procházející těžištěm nebo je v klidu")
114
Dokonale tuhé těleso VII Statika
Je-li výslednice všech sil, působících na DTT nulová, pohybuje se těleso rovnoměrně nebo je v klidu. Hledáním podmínek, za kterých zůstávají tělesa v klidu se zabývá statika. Obecně musí být vykompenzovány všechny síly a všechny momenty sil, a to každá jejich složka.

115
Dokonale tuhé těleso VIII Kinetická energie
Lze ukázat, že celková kinetická energie dokonale tuhého tělesa se obecně skládá z translační a rotační složky:

116
Dokonale tuhé těleso IX hmotnost ~ moment setrvačnosti
Ve vztazích pro rotační pohyb vystupuje moment setrvačnosti na místech, kde v analogických vztazích pro pohyb translační vystupuje hmotnost:

117
Pohyb nabitých částic v elektrostatickém poli I
Volné nabité částice se snaží pohybovat podél siločar ve směru poklesu své potenciální energie. Z druhého Newtonova zákona : V nerelativistickém případě :

118
Pohyb nabitých částic v elektrostatickém poli II
Poměr q/m, nazývaný specifický náboj je důležitou vlastností částice. elektron, positron |q/m| = C/kg proton, antiproton |q/m| = C/kg (1836 x) -částice (He jádro) |q/m| = C/kg (2 x) Další ionty … Akcelerace elementárních částic může být obrovská! Snadno lze dosáhnout relativistických rychlostí
 -částice (He jádro) |q/m| = C/kg (2 x) Další ionty … Akcelerace elementárních částic může být obrovská! Snadno lze dosáhnout relativistických rychlostí")
119
Pohyb nabitých částic v elektrostatickém poli III
Problémy lze řešit buď přes síly nebo energie. Postup přes energie je obvykle pohodlnější. Využívá zákon zachování energie a faktu, že v elektrostatickém poli existuje potenciální energie.

120
Pohyb ... IV energetický přístup
Je-li volná nabitá částice v určitý okamžik v bodě A elektrostatického pole a za nějakou dobu v libovolném bodě B, musí mít v obou bodech stejnou celkovou energii bez ohledu na čas, konkrétní tvar dráhy a složitost pole :

121
Pohyb ... V energetický přístup
Změna potenciální energie tedy musí být kompenzována změnami energie kinetické Ve fyzice vysokých energií se často používá jako jednotka energie 1 eV . 1eV = J.

122
Nabitý plný vodič I Vodiče obsahují volné nosiče náboje jedné nebo obou polarit. Nabít je znamená, přinést do nich nějaké přebytečné náboje jedné z polarit. Speciálním případem jsou kovy : každý atom, který je součástí kovu, si ponechává vnitřní elektrony ve své blízkosti. Ale elektrony valenční, slaběji vázané, jsou sdíleny celým kovem. Ty jsou volnými nosiči náboje. Působí-li na ně elektrická (nebo i jiná) síla mohou se v kovu volně pohybovat. Je relativně snadné kovu volné elektrony přidat nebo ubrat.
 síla mohou se v kovu volně pohybovat. Je relativně snadné kovu volné elektrony přidat nebo ubrat")
123
Nabitý plný vodič II Přidání elektronů znamená nabití kovu záporně
Odebrání elektronů je ekvivalentní nabití tělesa kladně. Pro naše účely můžeme mezery po chybějících elektronech považovat za volné kladné náboje +1e. V oblasti polovodičů se nazývají díry. Nabitý vodič efektivně obsahuje přebytečné kladné nebo záporné náboje, které jsou navíc volné.

124
Nabitý plný vodič III Přebytečné náboje se odpuzují a protože jsou volné a mohou se v rámci vodiče volně pohybovat, musí skončit na povrchu. Rovnováha, které je nakonec díky pohyblivosti nábojů dosaženo, je charakteristická tím, že výslednice sil, působících na každý náboj, je rovna nule. Znamená to, že uvnitř vodiče je nulové pole a celý jeho objem včetně povrchů je ekvipotenciální oblastí (a existují síly, které drží náboje v látce).
")
125
Elektrické proudy I Zatím jsme se zabývali rovnovážnými stavy.
Avšak než je jich dosaženo, dochází obvykle k pohybu volných nosičů náboje v nenulovém elektrickém poli, čili tam existují proudy. Často záměrně udržujeme na vodičích rozdíl potenciálů, abychom udrželi tok nosičů náboje, snažících se dosáhnout rovnováhy - elektrický proud. V určitém okamžiku je proud definován jako :

126
Elektrické proudy II Z fyzikálního hlediska rozlišujeme tři druhy proudu. První dva jsou přímo pohybem nosičů náboje: kondukční – pohyb volných nosičů náboje v látkách, pevných nebo roztocích konvekční – pohyb nábojů ve vakuu (např. elektronů v obrazovce) posuvný – je spojený s časovou změnou elektrického pole (nabíjení kondenzátorů, depolarizace dielektrik)
 posuvný – je spojený s časovou změnou elektrického pole (nabíjení kondenzátorů, depolarizace dielektrik)")
127
Elektrické proudy III Elektrické proudy mohou být uskutečněny pohybem nábojů obojí polarity. Podle konvence směřuje proud ve směru elektrického pole, čili stejně, jako kdyby pohybující se nosiče náboje byly kladné. Pokud jsou volné nosiče v určité látce záporné, jako například u kovů, pohybují se fyzicky proti směru konvenčního proudu.

128
Elektrické proudy IV Nejprve se budeme zabývat stacionárními proudy. Jedná se o zvláštní případ rovnováhy, kdy napětí a proudy v obvodech jsou stálá a konstantní. Stacionární proudy mohou být pouze konvekční nebo kondukční. Později se také zmíníme o časově proměnných proudech. Ty mohou být i posuvné.

129
Jednotkou proudu je 1 ampér se zkratkou A 1 A = 1 C/s.
Elektrické proudy V Jednotkou proudu je 1 ampér se zkratkou A 1 A = 1 C/s. Protože proudy lze relativně snadno měřit je právě ampér přijat jako základní elektrická jednotka v soustavě SI. Pomocí něj jsou potom definovány i další elektrické jednotky. Například 1 Coulomb : 1C = 1 As.

130
*Elektrické zdroje I Abychom udrželi konstantní proud, například ve vodivé tyčce, musíme udržet konstantní elektrické pole, které se snaží přivést náboje v tyčce k rovnováze. To je ekvivalentní udržování konstantního rozdílu potenciálu neboli napětí mezi konci tyčky. K tomu slouží zdroj elektrického napětí.

131
*Test Může být nabitý kondenzátor využit jako elektrický zdroj k dosažení stacionárního proudu? A) Ano B) Ne
 Ne")
132
*Odpověď Odpověď je NE! Nabitý kondenzátor může být využit jako zdroj například k pokrytí krátkodobých výpadků jiných zdrojů. Vybíjecí proud kondenzátoru však je nestacionární. Proud totiž vybíjí kondenzátor, čili způsobuje pokles jeho napětí a proto i sám klesá.

133
*Elektrické zdroje II Elektrický zdroj
je podobný kondenzátoru, ale musí obsahovat mechanismus, který doplňuje náboje odvedené z jednotlivých elektrod, aby napětí mezi nimi zůstalo zachováno. musí obsahovat síly neelektrické povahy (tzv. vtištěné např. chemické), které ho dobíjí. Musí například přenášet kladný náboj ze záporné elektrody na kladnou, a protože je mezi nimi napětí, konat tak práci. napětí mezi elektrodami je dáno rovnováhou mezi elektrickými a neelektrickými silami.
, které ho dobíjí. Musí například přenášet kladný náboj ze záporné elektrody na kladnou, a protože je mezi nimi napětí, konat tak práci. napětí mezi elektrodami je dáno rovnováhou mezi elektrickými a neelektrickými silami")
134
*Elektrické zdroje III
K udržení konstantního napětí při určitém konstantním proudu se dobíjení, čili i práce, musí vynakládat s určitou rychlostí, takže elektrický zdroj dodává do obvodu určitý výkon. Tam se výkon může transformovat na jiné formy, jako tepelný, světelný nebo mechanický. Část se ovšem vždy ztratí jako nechtěné teplo.

135
*Elektrické zdroje IV Existují speciální dobíjitelné zdroje – akumulátory. Jejich vlastnosti jsou velmi podobně kondenzátorům, ale pracují při určitém, (téměř) konstantním napětí. Proto potenciální energie akumulátoru nabitého nábojem Q na napětí U je : Ep = QU , tedy NE QU/2 , jak by tomu bylo u kondenzátoru.
 konstantním napětí. Proto potenciální energie akumulátoru nabitého nábojem Q na napětí U je : Ep = QU , tedy NE QU/2 , jak by tomu bylo u kondenzátoru")
136
Ohmův zákon Každé vodivé těleso potřebuje jisté napětí mezi svými konci, aby vzniklo elektrické pole s dostatečnou intenzitou k dosažení proudu určité velikosti. Toto napětí a proud jsou si přímo úměrné podle Ohmova zákona : U = RI Konstanta úměrnosti se nazývá rezistance (odpor). Je to napětí potřebné k dosažení proudu 1 A, čili se jedná o schopnost vzdorovat průtoku proudu. Jednotkou odporu je 1 ohm : 1 = 1 V/A
. Je to napětí potřebné k dosažení proudu 1 A, čili se jedná o schopnost vzdorovat průtoku proudu. Jednotkou odporu je 1 ohm : 1 = 1 V/A")
137
Rezistance a rezistory I
Každé situaci, kdy jistým vodičem protéká při určitém napětí určitý proud, můžeme přiřadit určitou rezistanci. U ideálního rezistoru (odporu) je rezistance konstantní bez ohledu na napětí a proud. V elektronice se používají speciální součástky – rezistory, které jsou vyvíjeny tak, aby jejich vlastnosti byly blízké ideálním rezistorům. Rezistance může obecně záviset na napětí, proudu, a řadě jiných faktorů.
 je rezistance konstantní bez ohledu na napětí a proud. V elektronice se používají speciální součástky – rezistory, které jsou vyvíjeny tak, aby jejich vlastnosti byly blízké ideálním rezistorům. Rezistance může obecně záviset na napětí, proudu, a řadě jiných faktorů")
138
Rezistance a rezistory II
Důležitou informací o každém vodivém materiálu je jeho volt-ampérová charakteristika. Je to naměřená a (vhodně) vynesená závislost proudu na napětí nebo naopak. Může odhalit důležité vlastnosti látek. V každém bodě takové charakteristiky můžeme definovat diferenciální rezistanci jako : dR = U/I Pro ideální odpor je tato veličina všude konstantní.
 vynesená závislost proudu na napětí nebo naopak. Může odhalit důležité vlastnosti látek. V každém bodě takové charakteristiky můžeme definovat diferenciální rezistanci jako : dR = U/I. Pro ideální odpor je tato veličina všude konstantní")
139
Skalární součin Ať Definice I (ve složkách) Definice II
Skalární součin je součin velikosti jednoho vektoru krát průmět velikosti vektoru druhého do jeho směru. ^

140
Dostředivé zrychlení při rovnoměrném pohybu po kružnici
Průvodič určitého bodu oběhne za jednu periodu T kružnici o poloměru r. Když umístíme počátky všech vektorů rychlosti do jednoho bodu, oběhnou koncové body kružnici o poloměru v. Můžeme tedy uvažovat jednoduchou analogii: ^

141
Dva elektrony 1 m od sebe Jsou elektrostaticky odpuzovány, ale gravitačně přitahovány. Která síla bude větší? ^

142
Jeden elektron a proton 0.53 10-10 m od sebe
To odpovídá jejich vzdálenosti v atomu vodíku. Takovou sílu je principiálně možné změřit makroskopicky! Značná velikost sil je tajemství, proč hmota drží pohromadě. ^

143
Oddělme elektrony a protony z 1 g vodíku a dejme je na póly Země.
1 g je 1 gram-molekula H, takže máme NA= obou typů částic. To je tíha naloženého nákladního vagónu. ^

144
Dvě 1 g Fe kuličky, 1 m od sebe se přitahují silou 10 N
Dvě 1 g Fe kuličky, 1 m od sebe se přitahují silou 10 N. Jaký je jejich přebytečný náboj? Přebytečný náboj : Celkový a přebytečný /celkový náboj : ^

145
Gradient I Je vektor sestrojený z diferenciálů funkce f ve směrech jednotlivých souřadných os . Je používán k odhadu změny funkce f provedeme-li elementární posun .

146
Gradient II Změna je druhý člen. Je to skalární součin. K největší změně dochází, je-li elementární posun paralelní ke směru gradientu. Jinými slovy má gradient směr největší změny funkce f ! ^

147
Zrychlení elektronu Jaké je zrychlení elektronu v elektrickém poli E = V/m ? a = E q/m = = ms-2 [J/Cm C/kg = N/kg = m/s2] Pro srovnání: Ferrari Maranello za cca 0.5 MEur dosáhne 100 km/h za 3.6 s , tedy a = 7.5 ms-2 ^

148
Relativistické efekty při urychlování elektronu
Relativistické efekty se začínají výrazněji projevovat, dosáhne-li rychlost c/10= ms-2. Jaké urychlovací napětí je potřebné k dosažení této rychlosti ? Ze zachování energie : mv2/2 = q U U=mv2/2e=9 1014/4 1011= 2.5 kV ! ^

149
Dva elektrony 1 m od sebe Jsou elektrostaticky odpuzovány, ale gravitačně přitahovány. Která síla bude větší? ^

150
Jeden elektron a proton 0.53 10-10 m od sebe
To odpovídá jejich vzdálenosti v atomu vodíku. Takovou sílu je principiálně možné změřit makroskopicky! Značná velikost sil je tajemství, proč hmota drží pohromadě. ^

151
Oddělme elektrony a protony z 1 g vodíku a dejme je na póly Země.
1 g je 1 gram-molekula H, takže máme NA= obou typů částic. To je tíha naloženého nákladního vagónu. ^

152
Dvě 1 g Fe kuličky, 1 m od sebe se přitahují silou 10 N
Dvě 1 g Fe kuličky, 1 m od sebe se přitahují silou 10 N. Jaký je jejich přebytečný náboj? Přebytečný náboj : Celkový a přebytečný /celkový náboj : ^





















