Stáhnout prezentaci
Prezentace se nahrává, počkejte prosím

1
Analýza dostupností signálů GPS s ohledem na konfiguraci terénu Analýza současných standardů formátu pro GPS, návrh algoritmu pro analýzu viditelnosti David VOJTEK VSB-TU Ostrava HGF dave_ostrava@hotmail.com

2
Úvod do problematiky Systém GPS byl vytvořen pro účely navigace armádou USA Navigaci zajišťuje síť 24 družic K zjištění přesné polohy je nutná přímá viditelnost (oblohy) min. 4 družic a jejích vhodná konstelace Hustá zástavba nebo lesní porost může viditelnost snížit. Projekt má poskytnout nástroje pro předpověď dostupnosti signálů GPS s využitím DMR Naplánovat měření či cestu rizikového nákladu.

3
Co bylo předcházelo? Toto téma bylo řešeno již v rámci stejnojmenné Diplomové práce Cílem této práce bylo vytvořit mapu dostupnosti signálů GPS pro zájmové území a libovolný čase Projekt se stal podkladem pro doktorandskou práci a poukázal na oblasti, kterým by se měla, mimo jiné, věnovat pozornost v rámci řešení doktorandské práce

4
Cíle projektu 1 Aplikace, která umožní vyhodnotit dostupnost signálů, kontinuitu signálů, DOP pro systém GPS (popřípadě GLONASS) a to libovolné části DMR ve vybrané oblasti Výstupy: –Mapa dostupností signálů –Mapa kontinuity signálů –Mapa DOP
 a to libovolné části DMR ve vybrané oblasti Výstupy: –Mapa dostupností signálů –Mapa kontinuity signálů –Mapa DOP")
5
Cíle projektu 2 Na základě splnění Cílů projektu 1 vytvořit postup pro: –plánování měřičské kampaně v zastavěné oblasti –zhodnocení dostupností signálů pro potřeby sledování kritických nákladů

6
Plán řešení Analýzy viditelnosti (počítačová grafika) Stanovení polohy družic, výpočet DOP DMR (typy, požívané standardy a formáty) Transformace souřadných systémů (S-JTSK WGS-84 S-42 PZ-90) Plánování měřičských kampaní a sledování trasy kritických nákladů
 Stanovení polohy družic, výpočet DOP DMR (typy, požívané standardy a formáty) Transformace souřadných systémů (S-JTSK WGS-84 S-42 PZ-90) Plánování měřičských kampaní a sledování trasy kritických nákladů")
7
Co se právě řeší? Analýza viditelnosti Výpočty polohy družic GPS DMR

8
Analýzy viditelnosti

9
Analýza viditelnosti Úlohy analýzami viditelností se zabývá obor počítačová grafika Počítačová grafika rozlišuje dva typy algoritmu pro řešení viditelnosti: –Obrazově orientované algoritmy –Objektově orientované algoritmy

10
Obrazově orientované algoritmy Pracuji s rastry, určí pro každý pixel obrazovky, který objekt lze v něm vidět (ten který je mu nejblíž) Výpočetní složitost n*p Pracují s promítnutými a poté rasterizovanýmí objekty Obrazové algoritmy jsou méně citlivé na chyby Nevýhodou je pevný rozměr výsledného rastru Neznámější algoritmem je Z-Buffer
 Výpočetní složitost n*p Pracují s promítnutými a poté rasterizovanýmí objekty Obrazové algoritmy jsou méně citlivé na chyby Nevýhodou je pevný rozměr výsledného rastru Neznámější algoritmem je Z-Buffer")
11
Objektově orientované algoritmy Pracují s objekty (stěny, hrany) a porovnávají jejich vzájemnou viditelnost. Jejich výpočetní náročnost je n 2 Výsledkem bývá seznam viditelných a neviditelných hran Bývají citlivé na chyby Zástupcem těchto algoritmu je Robertsův algoritmus

12
Viditelnost v GIS Programové prostředky pro GIS řeší 2 typy úloh analýzy viditelnosti –Viditelnosti na paprsku (line of sign) –Viditelnost oblasti z místa (viewshed) Byl proveden test těchto nástrojů u produktů: –ARC/INFO 8.1, ArcView 3.2 GIS –IDRISI 32 –ERDAS IMAGINE Profesional 8.4 Všechny testované programy pracovaly při analýze viditelnosti s DMR reprezentovaným GRIDEM
 –Viditelnost oblasti z místa (viewshed) Byl proveden test těchto nástrojů u produktů: –ARC/INFO 8.1, ArcView 3.2 GIS –IDRISI 32 –ERDAS IMAGINE Profesional 8.4 Všechny testované programy pracovaly při analýze viditelnosti s DMR reprezentovaným GRIDEM")
13
Ukázka výsledků testů DMTESRIERDASIDRISI Výstupy ArcView 3.2. GIS

14
Výsledky testů

15
Kde se poděl algoritmus použitý v Diplomové práci? Algoritmus byl alespoň podroben úpravě podle požadavků které jsou kladeny na algoritmy počítačové grafiky: –méně výpočetních operací –používaní celočíselných operací –převedení scény obecná 3D soustava > 3D soustava orientována do XY Pracuje s rastrem

16
GPS

17
Poloha družic GPS Polohu družic lze vypočíst na základě vztahů uvedených dokumentu IDC-200e (Interface Document Control) vydaném ARCIN ARCIN Incorporation je hlavním dodavatelem kontrolního rozhraní pro JPO (Join Program Office)
 vydaném ARCIN ARCIN Incorporation je hlavním dodavatelem kontrolního rozhraní pro JPO (Join Program Office)")
18
Výměnné formáty dat GPS Zdrojem pro načtení dat o oběžných drahách družic jsou almanachy a efemeridy Standardy obsahující data oběžných drah: –NMEA 0183 –RINEX (GPS nebo GLONASS efemeridy) –SEM (almanach) –YUMA (almanach) –SP3 (efemeridy) Výrobci GPS přijímačů používají vlastní komunikační protokoly
 –SEM (almanach) –YUMA (almanach) –SP3 (efemeridy) Výrobci GPS přijímačů používají vlastní komunikační protokoly")
19
Test GPS Byl proveden test dostupnosti signálů GPS v zastavěné oblasti a v zalesněném terénu. Prokázal že v zastavěné oblasti, dochází ke ztrátě signálů Test také ukázal také na velký vliv vysoké hodnoty koeficientu DOP Jestli dojde ke ztrátě signálu, to závisí na typu přístroje (TRIMBLE PathFinder PRO- XL, GARMIN )
.")
20
Zhodnocení

21
Co by mělo být vyřešeno ? Způsoby načítání dat o oběžných drahách družic GPS a rozšířit postup o družice systému GLONASS, ze všech hlavních formátů a ověřit správnost výpočtu Vytvořit implementovat alespoň jeden z algoritmů počítačové grafiky (obrazově orientovaný) Dokončit úpravu algoritmu použitého v rámci diplomové práce. Provést testy práce obou časové náročnosti a správnosti výpočtu a srovnat s komerčně používanými produkty GIS.
 Dokončit úpravu algoritmu použitého v rámci diplomové práce. Provést testy práce obou časové náročnosti a správnosti výpočtu a srovnat s komerčně používanými produkty GIS..")
22
Co se bude řešit dále ? Zjistit používané standardy pro DMR (DMT) Další postup bude věnována analýzám datových modelů pro DMR (DMT) v běžně používaných GISech Rozhodnutí zdali bude využíván datový model typu GRID, nebo TIN Studie transformací souřadných systémů S-JTSK, WGS-84, S-42, PZ-90
 Další postup bude věnována analýzám datových modelů pro DMR (DMT) v běžně používaných GISech Rozhodnutí zdali bude využíván datový model typu GRID, nebo TIN Studie transformací souřadných systémů S-JTSK, WGS-84, S-42, PZ-90.")
23
Konec

30
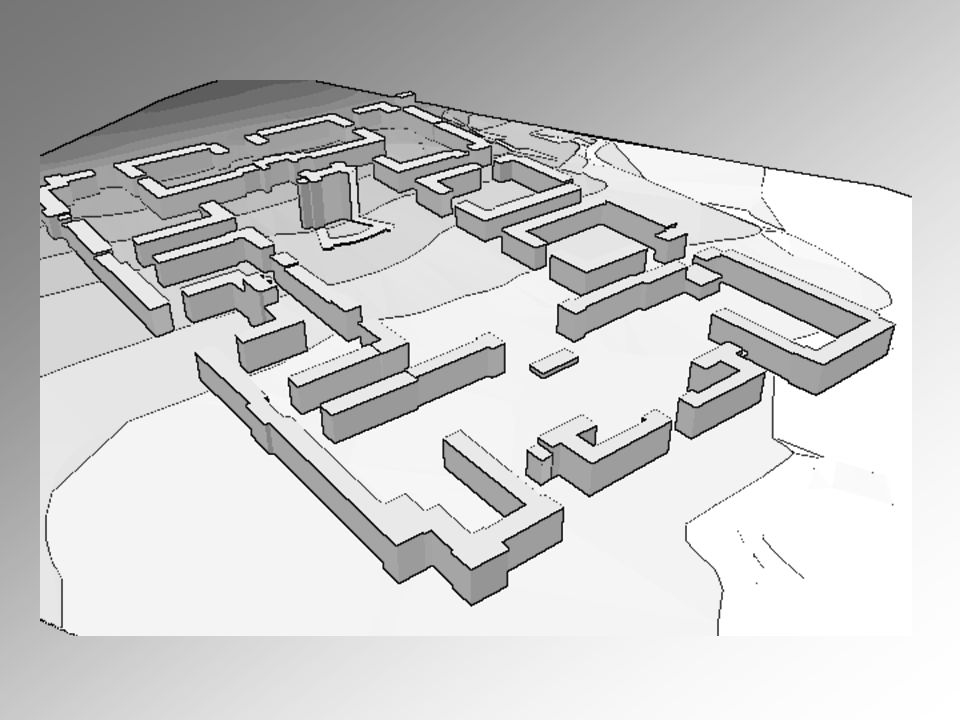
Závěry diplomové práce Pro DMR byl použit datový typ GRID –Generalizovány tvary střech –Nebyla zahrnuta vegetace Algoritmus pro stanovení viditelnosti družic GPS je funkční, ale neefektivní V mapě dostupnosti nebyly zahrnuty koeficienty DOP (Dilution of Precision) Bylo nalezeno mnoho formátů vstupních dat pro určení polohy družic GPS (nevyužito)
 Bylo nalezeno mnoho formátů vstupních dat pro určení polohy družic GPS (nevyužito)")
Podobné prezentace