Stáhnout prezentaci
Prezentace se nahrává, počkejte prosím

1
Kvalita obrazu Kontrast, rozlišení, neostrost, šum a jeho eliminace, digitalizace obrazu (kvantování a vzorkování), aliasing a antialiasing, ekvalizace histogramu. Mgr. David Zoul 2013

2
Předzpracování obrazu
Image enhancement methods: Rekonstrukce obrazu: Jas, kontrast. Ekvalizace histogramu. Odstranění šumu. Periodické poškození obrazu. Detekce a zvýraznění hran a rohů. Rozpoznání poškození. Invertování. Odstranění šumu.

3
Kontrast obrazu Kontrast: Rozdíl v signálu sousedních oblastí výsledného obrazu – závisí na rozdílu zeslabovacích vlastností zobrazovaného objektu: a) rozdíl tlouštěk z b) rozdíl v µ 1) kontrast objektu 2) kontrast detektoru 3) kontrast monitoru 4) vnímavost oka Redukce kontrastu: kde S je množství rozptýleného a P množství primárního záření, dopadajícího na receptor obrazu (žádoucí, aby byl podíl S/P (SPR) co nejmenší). Příklad 1: dokažte platnost této rovnosti
 rozdíl tlouštěk z. b) rozdíl v µ. 1) kontrast objektu. 2) kontrast detektoru. 3) kontrast monitoru. 4) vnímavost oka. Redukce kontrastu: kde S je množství rozptýleného a P množství primárního záření, dopadajícího na receptor obrazu (žádoucí, aby byl podíl S/P (SPR) co nejmenší). Příklad 1: dokažte platnost této rovnosti.")
4
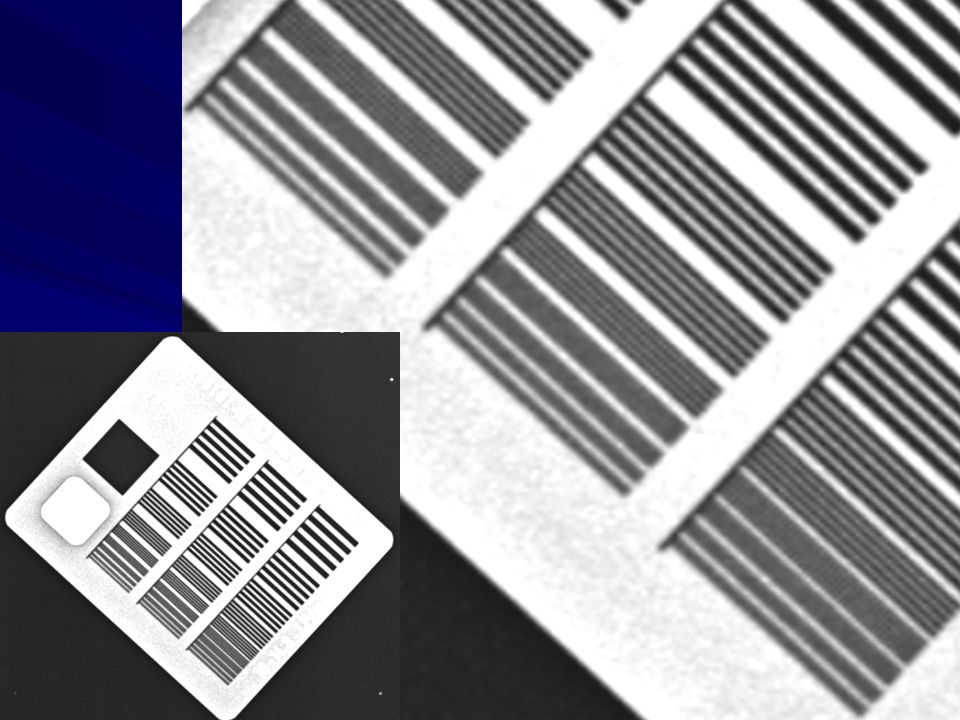
Pomůcky pro kontrolu zobrazení u přístrojů s přímou digitalizací obrazu Měření kontrastu

5
Rozlišení Rozlišení zobrazovacího systému lze popsat prostřednictvím odezvy na bodový impuls. Obraz bodového mpulsu – PSF (Point Spread Function) – má v ideálním případě tvar gaussovského píku, u něhož stanovujeme rozlišení standardně jako FWHM (Full Widh in Half Magnitude). Bodový impuls (Diracovu funkci) realizujeme při klasické RTG projekci tzv. dírkovou kamerou, při CT projekci tenkým kovovým drátkem kolmým k rovině řezu. V reálu má však ohnisko rentgenky, stejně jako otvor v dírkové kameře konečné rozměry, a obrazem bodového impulsu je proto právě Gaussova funkce. V důsledku rozbíhavosti svazku se při klasické RTG projekci tvar PSF v rámci detektoru obrazu mění místo od místa – gaussovskému píku odpovídá přibližně na centrální ose svazku
 – má v ideálním případě tvar gaussovského píku, u něhož stanovujeme rozlišení standardně jako FWHM (Full Widh in Half Magnitude). Bodový impuls (Diracovu funkci) realizujeme při klasické RTG projekci tzv. dírkovou kamerou, při CT projekci tenkým kovovým drátkem kolmým k rovině řezu. V reálu má však ohnisko rentgenky, stejně jako otvor v dírkové kameře konečné rozměry, a obrazem bodového impulsu je proto právě Gaussova funkce. V důsledku rozbíhavosti svazku se při klasické RTG projekci tvar PSF v rámci detektoru obrazu mění místo od místa – gaussovskému píku odpovídá přibližně na centrální ose svazku.")
6
Rozlišení Reálný obraz je složen z množství bodových impulsů různé amplitudy. PSF určuje neostrost výsledného obrazu. Původní ostrý obraz lze získat pomocí dekonvoluce, je-li známo jádro konvoluce – PSF.

7
Rozlišení Schopnost zobrazovacího systému rozlišit blízké kontrastní objekty ve výsledném obrazu FWHM signálu PSF (point spread function) pořízeného skrze dírkovou kameru 10 µm LSF (line spread function) signálu pořízeného štěrbinovou kamerou ESF (edge spread function) odezva na ostrou hranu – používá se pro hodnocení vlivů závislých na velikosti pole (např. SPR)
 pořízeného skrze dírkovou kameru. 10 µm. LSF (line spread function) signálu pořízeného štěrbinovou kamerou. ESF (edge spread function) odezva na ostrou hranu – používá se pro hodnocení vlivů závislých na velikosti pole (např. SPR)")
8
Gaussova funkce Bodový impuls PSF, či průmět snadněji měřitelné LSF, má charakter Gaussovy funkce kde 0 je parametr určující „šířku“ funkce. Stanovení jejího Fourierova obrazu provedeme z definičního vztahu, v němž obě exponenciely sloučíme a exponenty převedeme na součet čtverce a části nezávislé na x:

9
Gaussova funkce Poslední integrand nemá primitivní funkci, takže jej bylo nutno zintegrovat lebesgueovsky: čili Lze tedy psát což je hledaný Fourierův obraz Gaussovy funkce. Je vidět, že tvar funkce se zachová, ale šířky originálu a obrazu jsou si (v souladu s principem neurčitosti) nepřímo úměrné.
 nepřímo úměrné.")
10
Malý objekt v prostoru je velký ve frekvenční oblasti a na opak.
Princip neurčitosti FT prostor frekvenční FT prostor frekvenční Malý objekt v prostoru je velký ve frekvenční oblasti a na opak.

11
Rozlišení F (prostorová frekvence) udává se v lp/mm.
Měření F lze provádět buď pomocí Siemansovy hvězdice, nebo pomocí čárových testů.

12
Rozlišení MTF (modulační přenosová funkce) popisuje, jakým způsobem zobrazovací systém zaznamenává objekty se zvyšujícím se F. Při vysokém F dochází k modulaci MTF. MTF lze spočítat Fourierovou transformací LSF. Pokud má LSF gaussovský průběh, rovněž i MTF má gaussovský průběh. Čím je užší LSF (a tedy lepší rozlišení), tím je širší její Fourierova transformace MTF (důsledek principu neurčitosti) a tím vyšší je rozlišitelná F.
 popisuje, jakým způsobem zobrazovací systém zaznamenává objekty se zvyšujícím se F. Při vysokém F dochází k modulaci MTF. MTF lze spočítat Fourierovou transformací LSF. Pokud má LSF gaussovský průběh, rovněž i MTF má gaussovský průběh. Čím je užší LSF (a tedy lepší rozlišení), tím je širší její Fourierova transformace MTF (důsledek principu neurčitosti) a tím vyšší je rozlišitelná F.")
13
Rozlišení

15
Neostrost obrazu Neostrost: Geometrická neostrost (polostín)
kde D je nominální rozměr ohniska Pohybová neostrost kde a α je úhel směru pohybu vzhledem k rovině receptoru Materiálová neostrost – souvisí s použitím zesilujících fólií, ovlivněna jejich tloušťkou, velikostí zrn, kontaktem film-fólie.

16
Multiplikativní model
Příklad 2: Vypočtěte celkovou neostrost rentgenovaného objektu, který se pohybuje rychlostí 0,5 ms-1, jestliže expoziční čas činil 5 ms, vzdálenost ohnisko – objekt byla 60 cm, SID = 100 cm, a nominální velikost ohniska byla 0,3 mm. Materiálovou neostrost zanedbejte. Šum Aditivní model Modely šumu Multiplikativní model Elektrická interference Zdroj-Detektor interference Moiré patterns Korelované Typy šumu Kvantový šum na CCD kamery Kvantizovaný šum na dig. fotkách Neuronal noise in a retina Nekorelované

17
Šum a) Kvantový šum (poissonovské rozdělení)
b) Poměr signál – šum c) Kvantová detekční účinnost d) Strukturální šum – vzniká důsledkem náhodných fluktuací v počtu absorbovaných fotonů v jednotce plochy zesilující fólie filmu v důsledku nehomogenity scintilační vrstvy e) Zrnitost filmu – vzniká v důsledku nehomogenit v rozložení např. radiofotoluminiscenčních center na povrchu filmu a jejich odezvy při skenování f) Poměr kontrast – šum kde tloušťka vrstvy Al = 0,2 mm Příklad 3: Vypočtěte poměr signál – šum, jestliže na pixel detektoru dopadlo 106 fotonů a kvantová detekční účinnost detektoru je 10%. Příklad 4: Vypočtěte poměr kontrast – šum pro záření o polotloušťce 2 mm Al a pro stejné parametry, jako v předešlé úloze.
 Poměr signál – šum. c) Kvantová detekční účinnost. d) Strukturální šum – vzniká důsledkem náhodných fluktuací v počtu absorbovaných fotonů v jednotce plochy zesilující fólie filmu v důsledku nehomogenity scintilační vrstvy. e) Zrnitost filmu – vzniká v důsledku nehomogenit v rozložení např. radiofotoluminiscenčních center na povrchu filmu a jejich odezvy při skenování. f) Poměr kontrast – šum. kde tloušťka vrstvy Al = 0,2 mm. Příklad 3: Vypočtěte poměr signál – šum, jestliže na pixel detektoru dopadlo 106 fotonů a kvantová detekční účinnost detektoru je 10%. Příklad 4: Vypočtěte poměr kontrast – šum pro záření o polotloušťce. 2 mm Al a pro stejné parametry, jako v předešlé úloze.")
18
Kontrast a šum Náhodné fluktuace detekovaného signálu, nezávisle pro každý pixel Šum výrazně ovlivňuje kontrast. Roseovo kritérium: SNR 5
![]()
19
Pomůcky pro kontrolu zobrazení u přístrojů s přímou digitalizací obrazu Portalvision Phantom

20
C-D diagram Prostorové rozlišení lze nejlépe popsat pomocí MTF, kontrast pomocí SNR, popř. CNR. Diagram Contrast-Detail kvalitativně popisuje vzájemný vztah těchto parametrů zobrazovacího systému. Na ose x leží škála velikostí objektu (rozlišení detailů), na ose y pak kontrast objektu. A – lepší prostorové rozlišení B – lepší rozlišení kontrastu
, na ose y pak kontrast objektu. A – lepší prostorové rozlišení. B – lepší rozlišení kontrastu.")
21
Dynamický kontrast a kvantová detekční účinnost
Dynamický (expoziční) kontrast: Kvantová detekční účinnost: kde NPS je tzv. výkonové spektrum šumu, které se získá Fourierovou transformací autokorelační funkce ACF NEQ je ekvivalent šumu (číselně odpovídá Ndet)
 kontrast: Kvantová detekční účinnost: kde NPS je tzv. výkonové spektrum šumu, které se získá Fourierovou. transformací autokorelační funkce ACF. NEQ je ekvivalent šumu (číselně odpovídá Ndet)")
22
Eliminace šumu Cílem je snížit rozptyl šumové funkce.
Lidskému oku nejvíce vadí vysoké frekvence šumu nízkofrekvenční filtr. Informace o hranách také leží ve vysoké frekvenci.

23
Metody pro eliminaci šumu 1. „Časove“ průměrování
Snímá se vícekrát a konečný obraz je průměrem všech obrazů.

24
Metody pro eliminaci šumu 2. Obyčejné (souřadnicové) průměrování
 průměrování")
25
Metody pro eliminaci šumu 3. Průměrování podél hran
Pokud jsou hrany známé, tak podél hran používáme jiný filtr. V ostatních částech používáme souřadnicový filtr. Výsledek konvoluce v bodě měníme pouze když překročil zadaný práh, nebo když leží v daném intervalu (Podle toho jaké vlastnosti má šum a jaké je SNR) Metody pro eliminaci šumu 4. Prahování
 Metody pro eliminaci šumu 4. Prahování.")
26
Metody pro eliminaci šumu 5. Metoda rotujicího okna
Používají se dva typy konvoluční matice 3x3 pro všech 8 směrů (8 sousedů počítaného bodu). Metoda pracuje na okolí 5x5 bodů a to tak, že v osmi směrech od středního bodu počítá rozptyl. Vybere oblast s nejmenším rozptylem, oblast zprůměruje pomocí konvoluce a výslednou hodnotou nahradí bod uprostřed masky 5x5.
. Metoda pracuje na okolí 5x5 bodů a to tak, že v osmi směrech od středního bodu počítá rozptyl. Vybere oblast s nejmenším rozptylem, oblast zprůměruje pomocí konvoluce a výslednou hodnotou nahradí bod uprostřed masky 5x5.")
27
Metody pro eliminaci šumu 6. Mediánový Filtr
V okně provedeme seřazení dat a prostřední prvek (medián) tvoří výsledek. Výběrové okno je třeba zvolit tak, aby hrany nebyly na koncích. Algoritmus má při klasickém třídění náročnost O(n4) ale pomocí Quicksortu nebo Heapsortu nebo MergeSortu lze redukovat na O(n2 log 2n) případně na O(n log n). Existuje nová verze (FMF, Fast Median Filter) která má náročnost O(n)
 tvoří výsledek. Výběrové okno je třeba zvolit tak, aby hrany nebyly na koncích. Algoritmus má při klasickém třídění náročnost O(n4) ale pomocí Quicksortu nebo Heapsortu nebo MergeSortu lze redukovat na O(n2 log 2n) případně na O(n log n). Existuje nová verze (FMF, Fast Median Filter) která má náročnost O(n)")
28
Metody pro eliminaci šumu 7. Zobecněný Mediánový Filtr
Provedeme seřazení dat a na setříděnou posloupnost aplikujeme váhovou funkci w rovnu např.

29
Metody pro eliminaci šumu 8. Šum typu Salt and Pepper
U šumu typu S&P se většina pixelů správně zobrazí (bez šumu) a jen některé mají falešnou hodnotu 0 nebo 255. Pro takový šum stačí udělat průměrování v bodech mající hodnotu 0 nebo 255. Filtr se zvolí typu:
 a jen některé mají falešnou hodnotu 0 nebo 255. Pro takový šum stačí udělat průměrování v bodech mající hodnotu 0 nebo 255. Filtr se zvolí typu:")
30
Digitalizace obrazu high-res image pixelated quantized
ADC charakterizován vzorkovací frekvencí (pixelizace) a bitovou hloubkou (kvantování obrazu). S nižší vzorkovací frekvencí a bitovou hloubkou dochází ke ztrátě informací z původního analogového signálu. Výsledný digitální obraz obsahuje informaci o poloze bodů a amplitudě signálu v těchto bodech. K rekonstrukci obrazu na zobrazovací jednotce (monitoru) je zapotřebí DAC převodník. pixelated & quantized high-res image pixelated quantized
![]()
31
Kvantování (bitová hloubka) obrazu
 obrazu")
32
Kvantování (bitová hloubka) obrazu
Bitová hloubka určuje rozlišení kontrastu

33
Vzorkování (pixelizace)
Průměrování přes obdélník high-res image pixelated image
![]()
34
Vzorkování (pixelizace)
Ztratí se informace se vzorkováním? Ukazuje se, že za určitého předpokladu nikoliv Proces vzorkování lze chápat jako násobení původního obrázku s následujcí funkcí které říkáme „vzorkovací funkce“ a N je vzorkovací vzdálenost
![]()
35
Vzorkování (pixelizace)
Výsledný obraz je pak diskrétní verzí původního obrazu. Fourierova transformace takového obrazu je konvolucí FT původního obrazu a 2D delta funkce s intervaly 1/N. FT bude pak periodická
![]()
36
Vzorkování (pixelizace) obrazu
Určuje prostorové rozlišení
![]()
37
Aliasing Matice detekčních či zobrazovacích elementů je charakterizována vzorkovací šířkou a šířkou detekčního (zobrazovaccího) elementu – obě nenulové. Dochází ke vzorkování obrazu a zprůměrování obrazu přes šířku elementu. Interval prostorových frekvencí F, které mohou být detekovány či zobrazeny, je dána Nyquistovým kritériem F ≤ 1/(2).
 elementu – obě nenulové. Dochází ke vzorkování obrazu a zprůměrování obrazu přes šířku elementu. Interval prostorových frekvencí F, které mohou být detekovány či zobrazeny, je dána Nyquistovým kritériem F ≤ 1/(2).")
38
Aliasing

39
Aliasing

40
Aliasing Digitální receptory mají obdélníkovou LSF. Mějme obdélníkový puls popsaný funkcí Fourierova transformace obdélníkového pulzu je tedy Protože f(x) je sudá funkce, je poslední integrand lichou funkcí a jeho integrál je tudíž nulový. Máme tak Označme L vzorkovací šířku detektoru (vzdálenost středu dvou sousedních detekčních elementů), F prostorovou frekvenci (lp/mm) signálu.
 je sudá funkce, je poslední integrand lichou funkcí a jeho integrál je tudíž nulový. Máme tak. Označme L vzorkovací šířku detektoru (vzdálenost středu dvou sousedních detekčních elementů), F prostorovou frekvenci (lp/mm) signálu.")
41
Aliasing Nyquistovo kriterium:
Je li prostorová frekvence vstupního signálu vyšší než Flim, dochází k modulaci MTF, což se projeví jako splývání struktur – aliasing. Frekvence výsledného splynutého signálu je o tolik menší než F, o kolik je větší frekvence vstupního signálu oproti F.

42
Aliasing

43
Snímek cihlové zdi pořízený ve vysokém (vlevo) a v nízkém (vpravo) rozlišení
 a v nízkém (vpravo) rozlišení")
44
Anti-aliasing filter

45
Anti-aliasing

46
Image enhancement methods (Metody pro vylepšení obrazu)
Histogram obrazu je funkce četnosti jednotlivých intenzit. Kumulativní histogram obrazu je funkce intenzit kde pro každou intenzitu je funkční hodnota rovna počtu bodů majících svou intenzitu menší nebo rovnu.

47
Ekvalizace (Transformace) Histogramu
Obecně se jedná o transformace histogramu na požadovaný tvar. K transformaci se používá kumulativní histogram. Transformace je možné dělat i lokálně (změna jasu, kontrastu).
.")
48
Změna jasu 127 255

49
Změna jasu 127 255 transform mapping

50
Změna kontrastu

51
Histogram pro RGB obraz

52
Ekvalizace Histogramu
Ztráta detailů z ekvalizace histogramů

53
Zpracování digitálního obrazu
Korekce digitálního obrazu Iraw(x,y) (temný šum, vadné pixely): kdeD je průměrný temný šum elementů detektoru,G je průměrná odezva elementů detektoru na homogenní signál G(x,y). Vstupní výkonové spektrum šumu radiačního pole na povrchu detektoru Výkonové spektrum šumu na výstupu digitálního RTG zobrazovacího zařízení Detekční kvantová účinnost
 (temný šum, vadné pixely): kdeD je průměrný temný šum elementů detektoru,G je průměrná odezva elementů detektoru na homogenní signál G(x,y). Vstupní výkonové spektrum šumu radiačního pole na povrchu detektoru. Výkonové spektrum šumu na výstupu digitálního RTG zobrazovacího zařízení. Detekční kvantová účinnost.")
Podobné prezentace



>")















