Stáhnout prezentaci
1
Návrh komunikačního protokolu pro řízení vybraných robotických platforem Robert Čížek

2
Implementace základních rutin robotů Sestavení komunikačního protokolu pro jednotlivé platformy Otestování funkčnosti řešení Robert Čížek

3
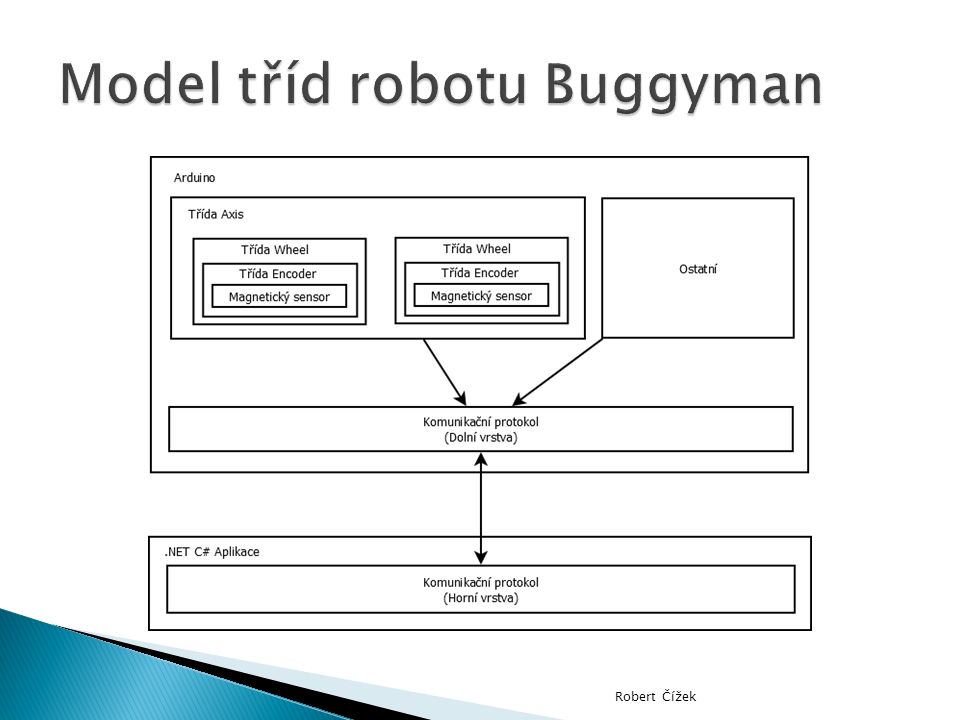
Robot Buggyman v parku na testovací jízdě před soutěží v Písku Robert Čížek Robot Buggyman

4
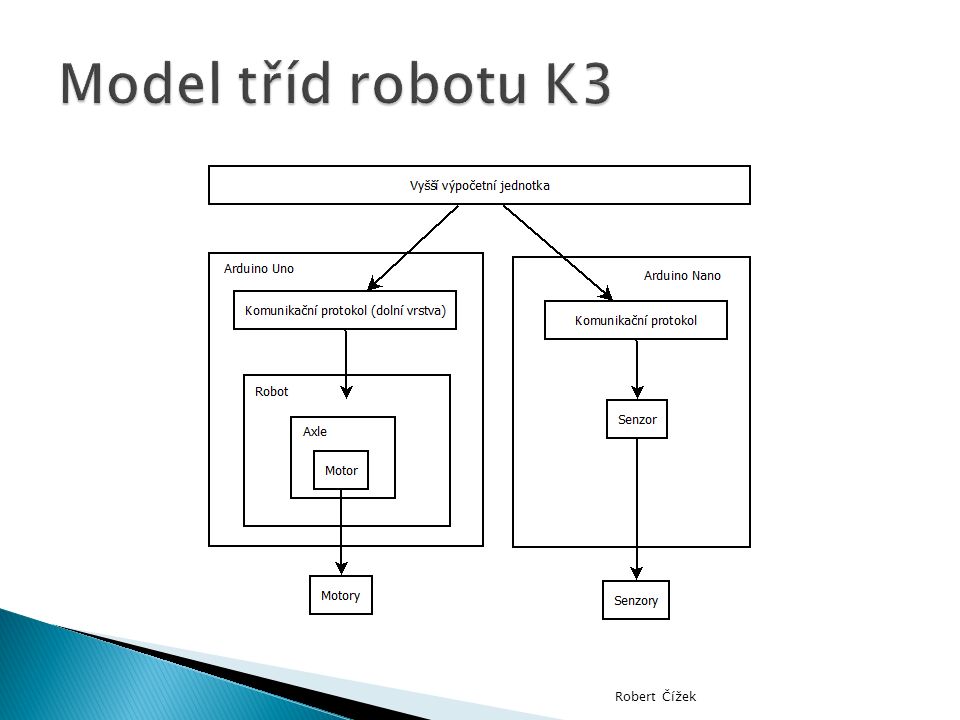
Renderovaný model robotu K3 v programu Solidworks Robert Čížek Robot K3

5
Výpočetní a kontrolní jednotka nižší HW vrstvy Arduino (C++) ◦ MEGA 2560 (Buggyman) ◦ Uno R2 (K3) ◦ Nano (K3) Komunikační protokol ◦ Sériový port (COM) Robert Čížek
 ◦ MEGA 2560 (Buggyman) ◦ Uno R2 (K3) ◦ Nano (K3) Komunikační protokol ◦ Sériový port (COM) Robert Čížek")
8
Objektový návrh (enkapsulace, dědičnost) Samostatné třídy pro jednotlivá zařízení a funkční logické celky Dolní část komunikačního protokolu Rozhodovací algoritmus Robert Čížek
 Samostatné třídy pro jednotlivá zařízení a funkční logické celky Dolní část komunikačního protokolu Rozhodovací algoritmus Robert Čížek")
9
Komunikační protokol v rozsahu 1 bajt (256 příkazů) Rozdělení dolní a horní poloviny bajtu Využito celkem 58 kombinací Robert Čížek
 Rozdělení dolní a horní poloviny bajtu Využito celkem 58 kombinací Robert Čížek")
10
Sériová komunikace Synchronní datová výměna Data ve formě sekvence bajtů (Little Endian) Přenos informací pouze integrálního datového typu (integer, long, byte, char,…) ◦ Unsigned ◦ Signed Robert Čížek
 Přenos informací pouze integrálního datového typu (integer, long, byte, char,…) ◦ Unsigned ◦ Signed Robert Čížek")
11
Dvě jednotky = dva protokoly Bajtový přenos v ASCII pro motory ◦ Forma datového paketu ◦ Enkapsulace Stop bajty Bajtový přenos čísel pro senzory Robert Čížek

12
Jednoduché úkony ◦ Volná jízda v prostoru ◦ Kalibrace podle předem daných kritérií Robotické soutěže Robert Čížek









 Používá se k dočasnému nebo trvalému uchovávání dat pomocí magnetické indukce. Jeho předchůdci byli magnetická.>")
: Komunikace řídících jednotek II. Tematická oblast:Speciální elektrická zařízení.>")




: Komunikace řídících jednotek I. Tematická oblast:Speciální elektrická zařízení.>")



: Diagnostika řídících jednotek I. Tematická oblast:Speciální elektrická zařízení.>")


