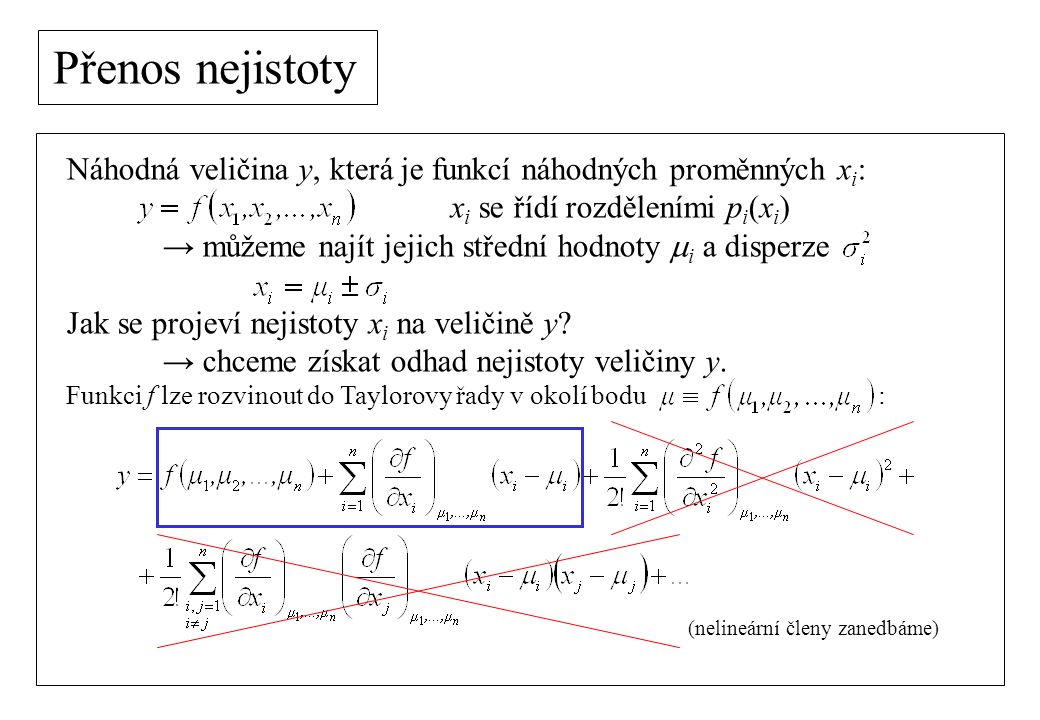
Přenos nejistoty Náhodná veličina y, která je funkcí náhodných proměnných xi: xi se řídí rozděleními pi(xi) → můžeme najít jejich střední hodnoty mi a disperze Jak se projeví nejistoty xi na veličině y? → chceme získat odhad nejistoty veličiny y. Funkci f lze rozvinout do Taylorovy řady v okolí bodu : (nelineární členy zanedbáme)
Přenos nejistoty Očekávaná hodnota: Disperze: Jsou-li xi nezávislé:
Nejistota nepřímého měření Příklad: měření el. odporu proměnné xi: U, I - měřením U jsme získali a , z přesnosti přístroje: uU, B → - měřením I jsme získali a , z přesnosti přístroje: uI, B Očekávaná hodnota: Nejistota: Výsledek:
Shrnutí: zpracování výsledků měření veličiny y = f(x1, x2, ..., xk) 1) Zpracování pro přímo měřené veličiny. Pro každou veličinu xi: a) výpočet aritm. průměru a směrodatné odchylky b) vyloučení hrubých chyb (>„3s“) c) výpočet odhadu standardní odchylky aritm. průměru d) určení chyby měřidla Dx. (Je-li , lze Dx zanedbat a obráceně.) e) volba pravděpodobnosti P a určení korekce tP (závisí na P a počtu měření ni) - např. P~ 68 % ... standardní odchylka („s“) f) určení celkové střední chyby veličiny xi: g) zaokrouhlení a zápis 2) Výsledek pro veličinu y: a) výpočet střední hodnoty: b) výpočet celkové střední chyby: c) zaokrouhlení a zápis výsledku: (P ~ 68 %)
Interpolace funkčních závislostí V experimentu měníme hodnotu jedné nebo několika veličin xi a studujeme závislost veličiny y. - např. měníme , ostatní xi bereme jako parametry (a, b, g, ...): Chceme posoudit platnost závislosti y na xi z výsledků experimentu. → tj. chceme získat odhady parametrů např. pro N hodnot jsme naměřili N hodnot Předpokládáme, že známe funkční závislost f a že přesnost nastavení hodnot veličiny x je řádově větší, než přesnost měření závisle proměnné y (která má obecně pro každý bod jinou dispersi). ... teoretická závislost (fyzikální zákon)
Metoda nejmenších čtverců Metoda početní interpolace. Používá se pro získání odhadů parametrů : 1) Zkonstruujeme veličinu 2) Hledáme minimum c2(a,b,g,...). x 1 2 3 4 5 6 7 y 0.2 0.4 0.6 0.8 1.0 1.2 1.4 1.6 1.8
Metoda nejmenších čtverců - lineární fit lineární fit, y = mx minimalizace c2: disperze m: problém: co když neznáme x 5 10 15 20 y -10 30 40 50 60 m = 2.48 0.03
Metoda nejmenších čtverců - lineární fit Pokud jsou neznámé, ale stejné, potom Pro neznámou disperzi pak lze spočítat odhad: ozn. - nevychýlený odhad: Odhad disperze m je tedy: ... minimální suma čtverců odchylek
Fitování Konstrukce křivky (funkce), která co nejlépe odpovídá naměřeným hodnotám. - může podléhat dodatečným podmínkám Lineární vs. nelineární regrese Interpolace a vyhlazování (spline) Regresní analýza a extrapolace Softwarové nástroje - Excel, Origin, Sigmaplot, ... - gnuplot, Octave, R, ... metoda největšího spádu Gaussova-Newtonova metoda algoritmus Levenberg–Marquardt simplex
