Stáhnout prezentaci
Prezentace se nahrává, počkejte prosím

1
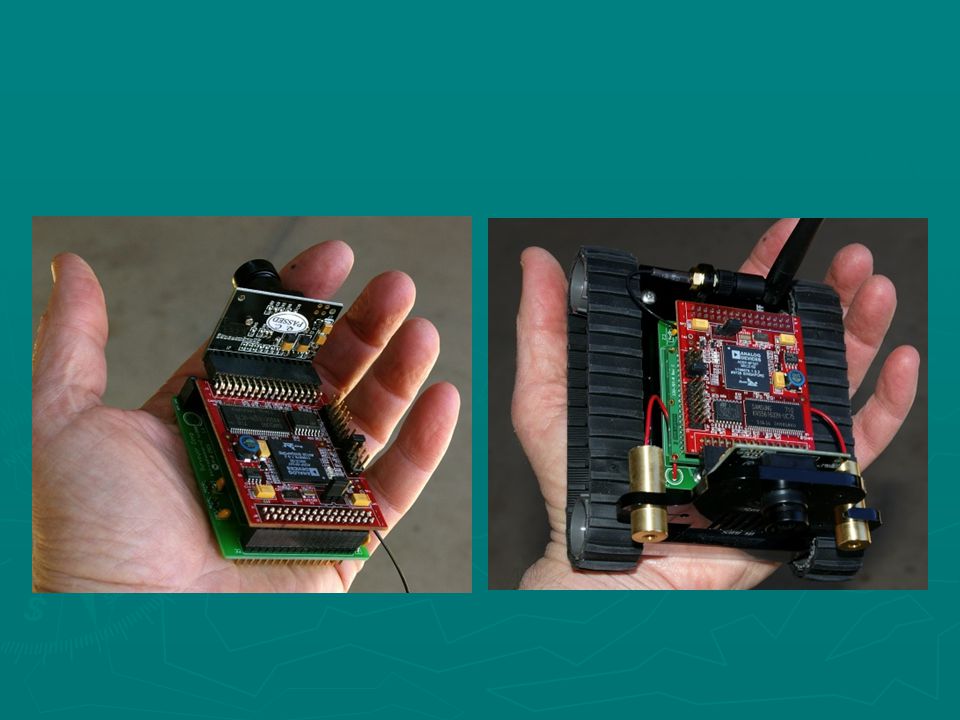
Surveyor SRV-1 Blackfin Camera

2
Součásti -500MHz Analog Devices Blackfin BF537 Processor
-Omnivision OV Megapixel Sensor -Radio/Motor Control Module

4
Specifications 500MHz Analog Devices Blackfin BF537 Processor (1000 integer MIPS) 32MB SDRAM, 4MB SPI Flash JTAG (tested with section5 ICEbear USB-JTAG) SPI Flash and UART boot mode select External I/O Header (32-pin - 16 x 2 x 0.1") 3.3V Input - 145mA total draw at 500MHz, including camera Board dimensions - 50 mm x 60 mm (2.0" x 2.6"), 36g (1.25 oz) including camera module 2 UARTS - tested at up to 2.5Mbps with CTS/RTS flow control 4 Timers (2 share pins with UART1) SPI - 2 slave select, 1 master select I2C 16 GPIO "S-32 expansion bus" header will support stacking of expansion boards RoHS compliant
 SPI Flash and UART boot mode select. External I/O Header (32-pin - 16 x 2 x 0.1 ) 3.3V Input - 145mA total draw at 500MHz, including camera. Board dimensions - 50 mm x 60 mm (2.0 x 2.6 ), 36g (1.25 oz) including camera module. 2 UARTS - tested at up to 2.5Mbps with CTS/RTS flow control. 4 Timers (2 share pins with UART1) SPI - 2 slave select, 1 master select. I2C. 16 GPIO. S-32 expansion bus header will support stacking of expansion boards. RoHS compliant.")
5
Blackfin BF537 Processor Features
Up to 600MHz high performance Blackfin processor Two 16-bit MACs (Multiply-accumulate), two 40-bit ALUs, four 8-bit video ALUs, 40-bit shifter RISC-like register and instruction model for ease of programming and compiler-friendly support Advanced debug, trace, and performance monitoring 0.8V to 1.2V core VDD with on-chip voltage regulation 2.5 V and 3.3 V-compliant I/O with specific 5 V-tolerant pins (PJ4 and TWI pins – SDA, SCL)
, two 40-bit ALUs, four 8-bit video ALUs, 40-bit shifter. RISC-like register and instruction model for ease of programming and compiler-friendly support. Advanced debug, trace, and performance monitoring. 0.8V to 1.2V core VDD with on-chip voltage regulation. 2.5 V and 3.3 V-compliant I/O with specific 5 V-tolerant pins (PJ4 and TWI pins – SDA, SCL)")
6
Blackfin BF537 Processor Memory
Up to 132K bytes of on-chip memory comprised of: Instruction SRAM/cache instruction SRAM data SRAM/cache additional dedicated data SRAM scratchpad SRAM External memory controller with glueless support for SDRAM and asynchronous 8-bit and 16-bit memories Flexible booting options from external flash, SPI and TWI memory or from SPI, TWI, and UART host devices Memory management unit providing memory protection

7
Blackfin BF537 Processor Peripherals
IEEE compliant 10/100 Ethernet MAC Controller area network (CAN) 2.0B interface Parallel peripheral interface (PPI), supporting ITU-R 656 video data formats Two dual-channel, full-duplex synchronous serial ports (SPORTs), supporting eight stereo I2S channels 12 peripheral DMAs, 2 mastered by the Ethernet MAC Two memory-to-memory DMAs with external request lines Event handler with 32 interrupt inputs
 2.0B interface. Parallel peripheral interface (PPI), supporting ITU-R 656 video data formats. Two dual-channel, full-duplex synchronous serial ports (SPORTs), supporting eight stereo I2S channels. 12 peripheral DMAs, 2 mastered by the Ethernet MAC. Two memory-to-memory DMAs with external request lines. Event handler with 32 interrupt inputs.")
8
Blackfin BF537 Processor Peripherals
Serial peripheral interface (SPI)-compatible Two UARTs with IrDA® support Two-wire interface (TWI) controller Eight 32-bit timer/counters with PWM support Real-time clock (RTC) and watchdog timer 32-bit core timer 48 general-purpose I/Os (GPIOs), 8 with high current drivers On-chip PLL capable of 1 to 63 frequency multiplication Debug/JTAG interface
-compatible. Two UARTs with IrDA® support. Two-wire interface (TWI) controller. Eight 32-bit timer/counters with PWM support. Real-time clock (RTC) and watchdog timer. 32-bit core timer. 48 general-purpose I/Os (GPIOs), 8 with high current drivers. On-chip PLL capable of 1 to 63 frequency multiplication. Debug/JTAG interface.")
9
Blackfin BF537 Processor Description
Blackfin processors combine a dual-MAC state-of-the-art signal processing engine, the advantages of a clean, orthogonal RISClike microprocessor instruction set, and single-instruction, multiple-data (SIMD) multimedia capabilities into a single instruction-set architecture. low power and low voltage combining industry-standard interfaces with a high performance signal processing core
 multimedia capabilities into a single instruction-set architecture. low power and low voltage. combining industry-standard interfaces with a high performance signal processing core.")
10
Omnivision OV9655 1.3 Megapixel Sensor
(with support for OV7725 low light VGA sensor) AA Format Module (32-pin header - 16 x 2 x 0.1") Interchangeable Lens - M12 P=0.5 format (12mm diameter, 0.5mm thread pitch). Standard lens is 3.6mm f2.0 (90-deg), optional 2.2mm f2.5 (120-deg) Camera header on production board is 90-degree female (vs straight female header shown in top left photo) - 90-degree expansion connector available to place camera parallel with processor board RoHS compliant
![]()
11
Omnivision OV9655 1.3 Megapixel Sensor
Power Supply Core 1,8 V +-10% Analog 2,45 - 3,0 V I/O 1,7 - 3,3 V 90 mW typical (15 fps SXGA YUV format) Standby <20uA Temperature -30°C to +70°C Stable image 0°C to 50°C Output Formats YUV/YCbCr 4:2:2 RGB565/555 GRB 4:2:2 Raw RGB Data
![]()
12
Omnivision OV9655 1.3 Megapixel Sensor
Maximum Image Transfer Rate SXGA 15 fps VGA, CIF and down scaling 30 fps Features High sensitivity for low-light operation VarioPixel® method fo sub-sampling VarioPixel is a newly developed technology that uses multiple pixels to act as a single pixel in order to improve the chips performance. CameraChips that incorporate the technology can provide significantly improved low light performance at video resolutions giving consumers improved LCD preview capabilities and enhanced video capture.
![]()
13
Omnivision OV9655 1.3 Megapixel Sensor
Automatic image control functions Exposure Gain White balanc Band filter Black-level calibration Image quality controls saturation gamma sharpness (edge enhancement) lens correction white pixel canceling noise canceling 50/60 Hz luminate detection
![]()
15
Radio/Motor Control Module
WiFi communication via Lantronix Matchport WLAN g radio u.fl connector to external antenna On-board 3.3V high efficiency switching regulator (Recom R ) for battery input ( VDC) Dual H-bridge motor driver (Fairchild FAN8200) with 1000mA capacity per motor 2 switching transistor drivers with 100mA capacity for laser range pointers Board dimensions - 50 mm x 65 mm (2.0" x 2.6"), 10g (0.4 oz) Mounts to SRV-1 Blackfin Camera via 32-pin external i/o header ("S-32 expansion bus") RoHS compliant
 for battery input ( VDC) Dual H-bridge motor driver (Fairchild FAN8200) with 1000mA capacity per motor. 2 switching transistor drivers with 100mA capacity for laser range pointers. Board dimensions - 50 mm x 65 mm (2.0 x 2.6 ), 10g (0.4 oz) Mounts to SRV-1 Blackfin Camera via 32-pin external i/o header ( S-32 expansion bus ) RoHS compliant.")
16
Lantronix Matchport b/g
wireless embedded device server provides a network-enabling solution based on the IEEE b/g combines a processor, memory, b/g transceiver, and 921 Kbps (maximum) serial ports includes an operating system, an embedded web server, and a full TCP/IP protocol stack.
 serial ports. includes an operating system, an embedded web server, and a full TCP/IP protocol stack.")
17
Lantronix Matchport b/g
Security Wired Equivalent Privacy – WEP (RC4 encryption algorithm, 64-bit or 104-bit key) Wireless Protected Access – WPA (Temporal Key Integrity Protocol - TKIP) 802.11i/WPA2-Personal models with and without AES encryption
 Wireless Protected Access – WPA (Temporal Key Integrity Protocol - TKIP) i/WPA2-Personal. models with and without AES encryption.")
18
Lantronix Matchport b/g
Capabilities Communication between TCP and UDP to serial Wireless interface (802.11b/g) with protection Wired Ethernet-to-wireless bridging host connected to the MatchPort b/g over a wired Ethernet interface to be accessible over a wireless network. Two serial channels; up to 921 Kbps data rate notification of configurable alarms and events Upgradeable firmware Simple Network Management Protocol (SNMP) monitoring Connection to devices through a TCP or UDP data channel to computers or to another device server Web server allowing presentation of custom content and easy configuration through the browser Contains eight programmable I/O pins used to monitor or control attached devices.
 with protection. Wired Ethernet-to-wireless bridging. host connected to the MatchPort b/g over a wired Ethernet interface to be accessible over a wireless network. Two serial channels; up to 921 Kbps data rate. notification of configurable alarms and events. Upgradeable firmware. Simple Network Management Protocol (SNMP) monitoring. Connection to devices through a TCP or UDP data channel to computers or to another device server. Web server allowing presentation of custom content and easy configuration through the browser. Contains eight programmable I/O pins used to monitor or control attached devices.")
19
Lantronix Matchport b/g
Protocol Support ARP, UDP, TCP, ICMP, Telnet, TFTP, AutoIP, DHCP, HTTP, and SNMP for network communications and management. TCP, UDP, and Telnet for connections to the serial ports. TFTP for firmware and web page updates. IP for addressing, routing, and data block handling over the network. UDP for typical datagram applications in which devices interact with other devices without maintaining a point-to-point connection. SMTP for transmission.

20
Stereo Vision System Two SRV-1 Blackfin Cameras separated by cm (4.25") Interprocessor communications via SPI bus (64MHz) WiFi communication via Lantronix Matchport WLAN g radio w/onboard 3dB dipole antenna On-board 3.3V high efficiency switching regulator (Recom R ) for battery input ( VDC) Headers for 8 servos (5V supply provided) Dual H-bridge motor driver (Fairchild FAN8200) with 1000mA capacity per motor Two switching transistor drivers with 100mA capacity for lights and laser pointers Low battery detect circuit Headers for 8 servos (5V regulator provided) Extended pin headers for full access to S-32 expansion bus of both processors Board dimensions - 60 mm x 150 mm (2.5" x 6.0"), 140g (5 oz) 1" x 2" mounting hole pattern for compatibility with SRV-1 robot base (dual and quad motor versions) RoHS compliant
 for battery input ( VDC) Headers for 8 servos (5V supply provided) Dual H-bridge motor driver (Fairchild FAN8200) with 1000mA capacity per motor. Two switching transistor drivers with 100mA capacity for lights and laser pointers. Low battery detect circuit. Headers for 8 servos (5V regulator provided) Extended pin headers for full access to S-32 expansion bus of both processors. Board dimensions - 60 mm x 150 mm (2.5 x 6.0 ), 140g (5 oz) 1 x 2 mounting hole pattern for compatibility with SRV-1 robot base (dual and quad motor versions) RoHS compliant.")
21
Default Firmware Full-speed frame capture direct to SDRAM at 1280x1024, 640x480, 320x256 or 160x128 pixel resolutions JPEG (Motion JPEG) compression Basic image processing - histogram, pixel sampling, mean, frame difference, blob, scan, count, find Motor control for PWM (H-bridge) and PPM (servo) interfaces Built-in C interpreter for scripting and autonomous operation Real-Time-Clock (milliseconds since reset), internal timer resolution to 10 nanoseconds Direct control of I2C and SPI devices In-Application-Programming (IAP) of flash memory XMODEM protocol for reliable file transfer Direct support for up to 4 Maxbotics ultrasound rangers, Locosys GPS and Honeywell HMC6352 compass Compiled with GNU Blackfin Toolchain (bfin-elf-gcc) found below Can be replaced by u-boot / uClinux found below
![]()
22
Firmware Control Protocol
Příkazy se posílají jako ASCII znaky Na každý příkaz robot odpoví tím, že zopakuje příkaz a před ním pošle znak #, nebo pošle ## následované delší odpovědí Příkazy lze posílat přes terminálový program s TCP / telnetem jako je netcat, telnet… Při zapnutí robot pošle odpověď, jako kdyby dostal příkaz ‘V‘ – vypíše verzi firmware Po zapnutí je nutné počkat asi 2 s, než bude robot schopný přijímat příkazy Popis příkazů na

23
Firmware Nejvíce informací na diskuzi
Obsahuje 2 interprety Prototyp interpretu Lispu 'P' spustí program Lispu z flash bufferu '!' spustí Lisp interaktivně Little C interpret 'Q' spustí program z flash bufferu Založen na picoC open source C interpreter

24
Firmware Příkazy obrazu
'vbc' - 'vb' hledá oblast s barvami mečujícími s barvami v proměnné 'c', vrací souřadnice obdélníku ohraničujícího oblast a počet pixelů hledané barvy, může vrátit až 16 oblastí 'vccy1y2u1u2v1v2' - nastaví barvu v proměnné 'c' 'vh' – spočítá histogram 'vm' – spočítá průměrnou hodnotu barev Y, U a V 'vpxxxxyyyy' – vrátí hodnotu pixelu daného souřadnicem xxx a yyy 'vrc' – vrátí hodnotu barev v proměnné 'c' 'vzx' – nuluje barvy v proměnné x (1-4), pro x=0 nuluje všechny barvy
, pro x=0 nuluje všechny barvy.")
25
Firmware Příkazy neuronové sítě 'np' – uloží nový vzorek
'nd' – zobrazí uložený vzorek 'ni' – inicializuje síť s náhodnými vahami 'nt' – trénuje síť z uloženého vzorku 'nx' – testuje síť se zkušebním vzorkem 'ng' – vezme vzorek použitím oblasti dané "vb" 'nb' – mečuje vzorek proti oblasti dané "vb"

26
Java konzole Lze stáhnout na http://www.surveyor.com/
Jednoduché a rychlé ověření funkčnosti Po konfiguraci MatchPortu přes webový prohlížeč a upravení konfiguračního souboru konzole (adresa a port robota) je možné se k robotovi přes ni připojit Lze nastavit vzhled a počet tlačítek a jaký příkaz mají robotovi poslat button.12=buttons/laser.png command.12=6C Zobrazuje video z robota Obsahuje webový server umožňující přístup k robotovi přes internet
 je možné se k robotovi přes ni připojit. Lze nastavit vzhled a počet tlačítek a jaký příkaz mají robotovi poslat. button.12=buttons/laser.png. command.12=6C. Zobrazuje video z robota. Obsahuje webový server umožňující přístup k robotovi přes internet.")
28
C++ konzole Lze stáhnout na Sama o sobě nezobrazuje video, umí ukládat obrázky na disk Využitelnější pro programování autonomního chování robota Implementuje komunikační rozhraní k robotovi, funkce jako setVideoMode(int mode) nad posíláním příkazů robotovi
 nad posíláním příkazů robotovi.")
Podobné prezentace



















>")
