Stáhnout prezentaci
Prezentace se nahrává, počkejte prosím

1
Charakteristiky stejnosměrných motorů
Dostupné z Metodického portálu ISSN: , financovaného z ESF a státního rozpočtu ČR. Provozováno Výzkumným ústavem pedagogickým v Praze.

3
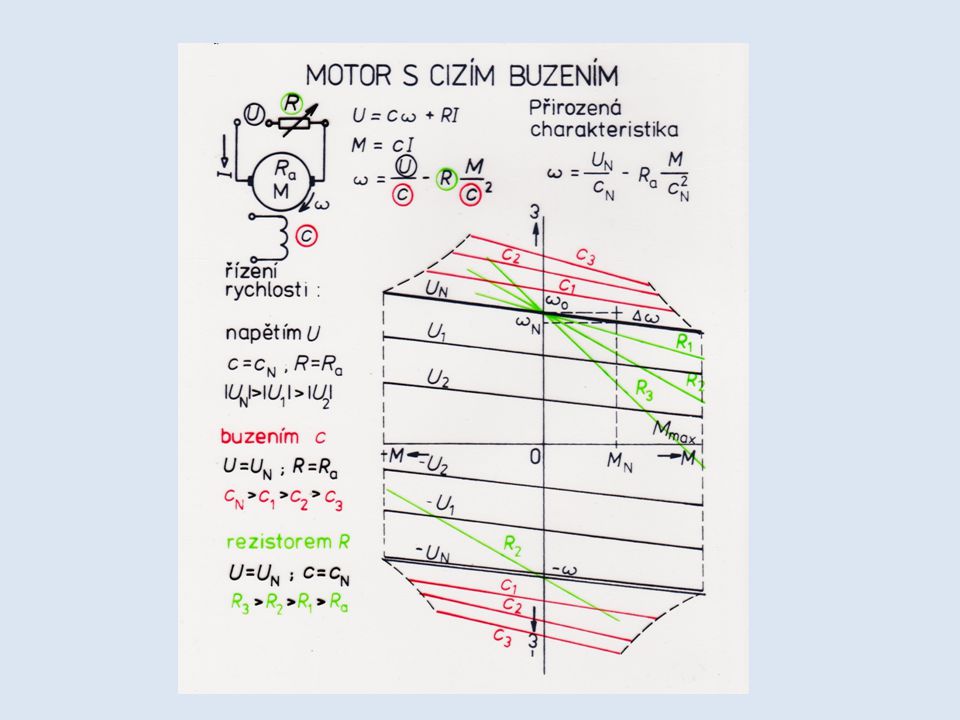
Chování stejnosměrných motorů při zatěžování popisuje lineární závislost úhlové rychlosti na momentu ω = f(M), nebo otáček na momentu n = f (M). Budící vinutí derivačního motoru je připojeno paralelně ke svorkám napájecí sítě. Tato síť je zdrojem nezávislým na motoru (cizí zdroj), proto vlastnosti motoru s cizím buzením a motoru derivačního jsou popsány shodně. Řízení otáček vychází ze vztahu Lze je řídi třemi způsoby: - napájecím napětím (při zvýšení napětí se zvyšují otáčky) - budícím tokem, tj. změnou budícího proudu (při zvyšování budícího proudu se otáčky snižují). - změnou odporu v obvodu kotvy (mění se sklon charky, při zvyšování odporu se zvětšuje strmost).
, proto vlastnosti motoru s cizím buzením a motoru derivačního jsou popsány shodně. Řízení otáček vychází ze vztahu. Lze je řídi třemi způsoby: - napájecím napětím (při zvýšení napětí se zvyšují otáčky) - budícím tokem, tj. změnou budícího proudu (při. zvyšování budícího proudu se otáčky snižují). - změnou odporu v obvodu kotvy (mění se sklon charky, při zvyšování odporu se zvětšuje strmost).")
5
Brzdit lze motor derivační a s cizím buzením třemi způsoby:
- rekuperací, tj. navrácení výkonu do sítě – při zvětšení budícího proudu dojde k poklesu otáček, stroj přejde z pracovního bodu 1 do bodu 1‘. Otáčky se snižují do bodu 2. - protiproudem – při změně polarity se otáčky stanou zápornými a pracovní bod 1‘ se nachází v levé polorovině v nekonečnu. Přepnutí by doprovázel velký proudový náraz, proto současně je zařazen do obvodu kotvy odpor R, který změní sklon charakteristiky. Po dobrzdění na nulové otáčky je nutno zajistit odpojení stroje od napájení. - odporem –motor se odpojí od sítě a svorky se zatíží odporem, ve kterém se maří brzděná energie.

7
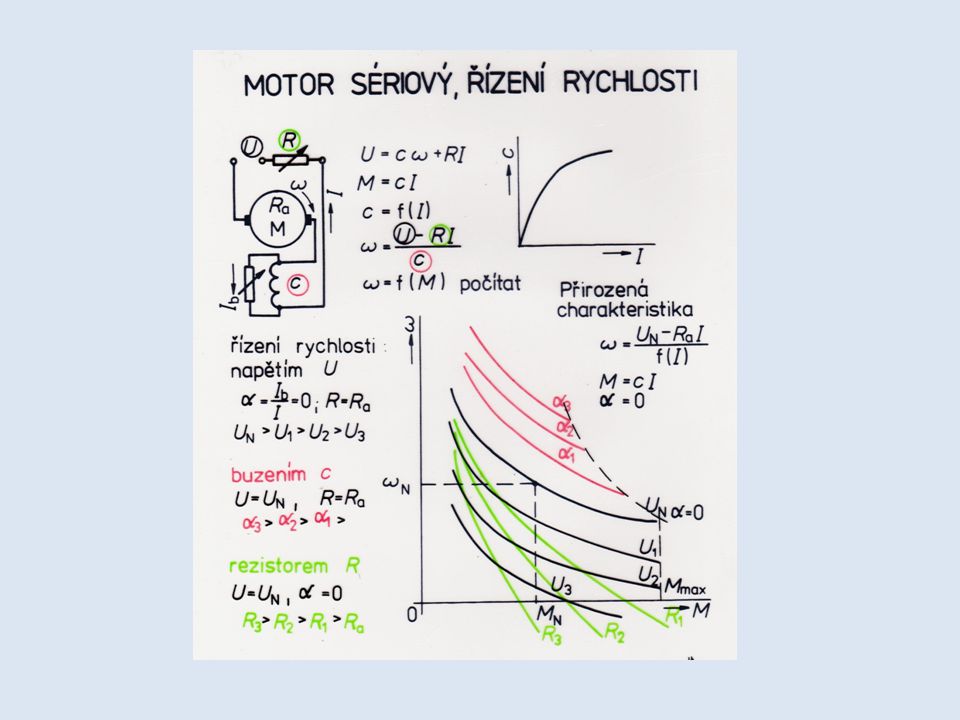
Charakteristiky sériového motoru se blíží hyperbole, teoreticky se otáčky mohou řídit stejnými způsoby, jako u předchozího motoru: - napětím – při snižujícím se napětí se otáčky snižují. - buzením – vzhledem k tomu, že budící proud prochází současně kotvou, používá se tzv. shunt, což je paralelní bočník připojený k budícímu vinutí, kterým prochází část pracovního proudu. Lze tedy provádět pouze odbuzování, tedy zvyšování otáček. - rezistorem – mění se strmost charakteristiky. Sériový motor nesmí běžet bez zatížení, neboť dojde k odbuzení a otáčky se zvyšují nad bezpečnou mez.

9
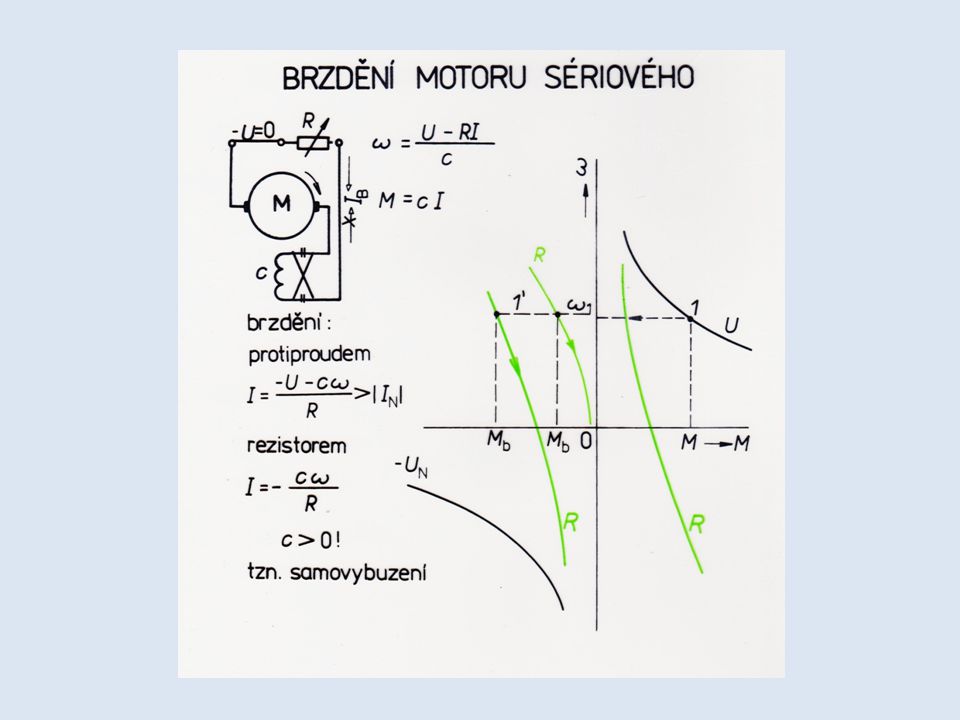
Brzdění sériového motoru není možné rekuperací, neboť při navrácení energie do sítě dojde ke změně směru proudu. Ten protéká rovněž budícím vinutím. Při změně směru proudu v tomto vinutí by došlo k potlačení remanentní magnetizace pólů. Proto jsou použitelné jen další dva způsoby: - protiproudem – opět pouze s použitím odporu v obvodu kotvy, motor přejde z bodu 1 do bodu 1‘ a po zelené charakteristice dobrzdí do nulových otáček. - do odporu – motor se odpojí od sítě, ke svorkám se připojí odpor, ve kterém se maří brzděná energie.

10
K zopakování: Proč lze považovat vlastnosti stejnosměrného motoru s cizím buzením derivačního za stejné? Jakými způsoby lze regulovat otáčky těchto dvou motorů? Čím lze brzdit tyto dva motory? Jak lze regulovat otáčky sériového stroje? Jakým způsobem jej lze brzdit?

Podobné prezentace