Stáhnout prezentaci
1
Středoškolská odborná činnost Modulární stavba robota Aleš Aster SPŠ A VOŠ Technická, Sokolská 1, Brno

2
Historie Pokračování na práci z minulého roku Účast na různých robotických soutěžích Robotický den v Praze

4
Důvody k předělání pohonu Účast na jiných soutěžích Zvětšení obratnosti robota Velikost současných motorů

5
Pohon Skládá se z těla, které nese ostatní části pohonu, motor, převodovku, kolo

6
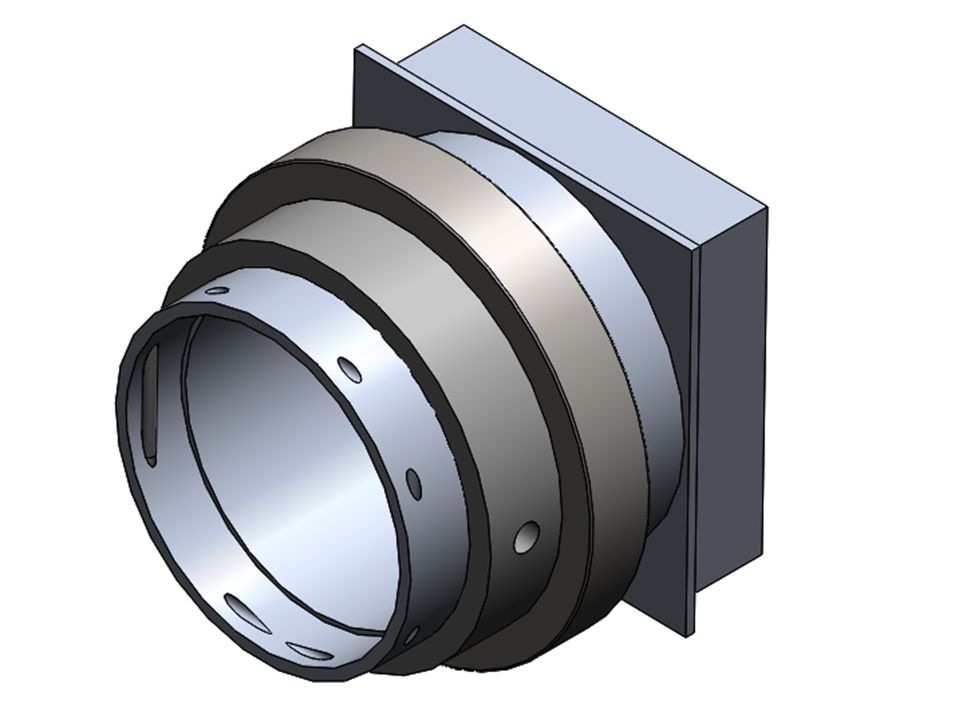
Tělo Vyrobeno z hliníkového kvádru Hlavní nosná součást pohonu Dvě ložiska

8
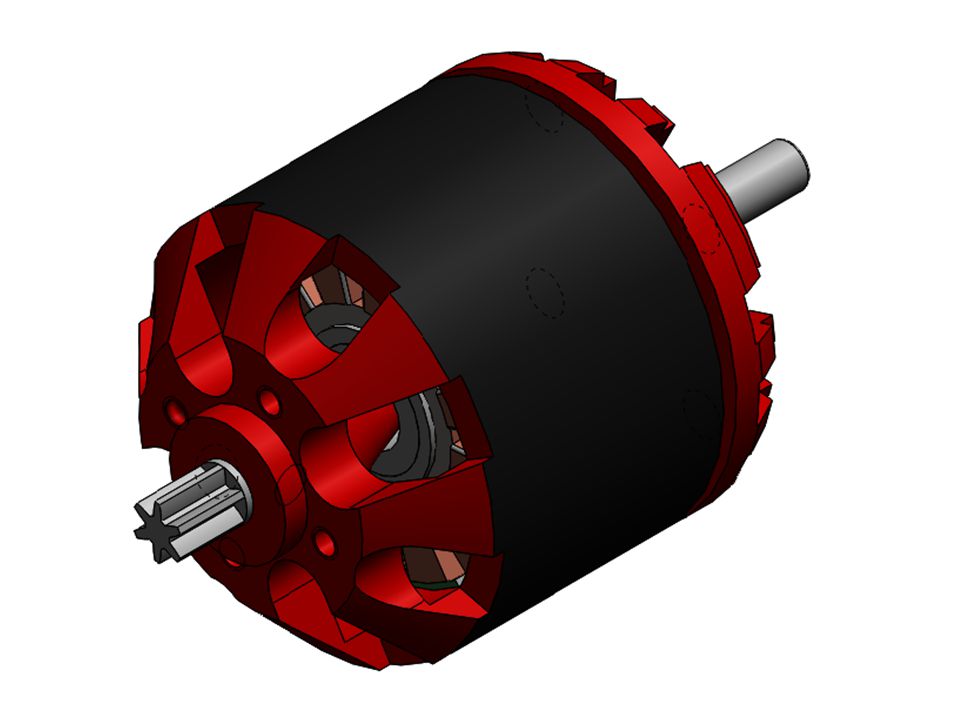
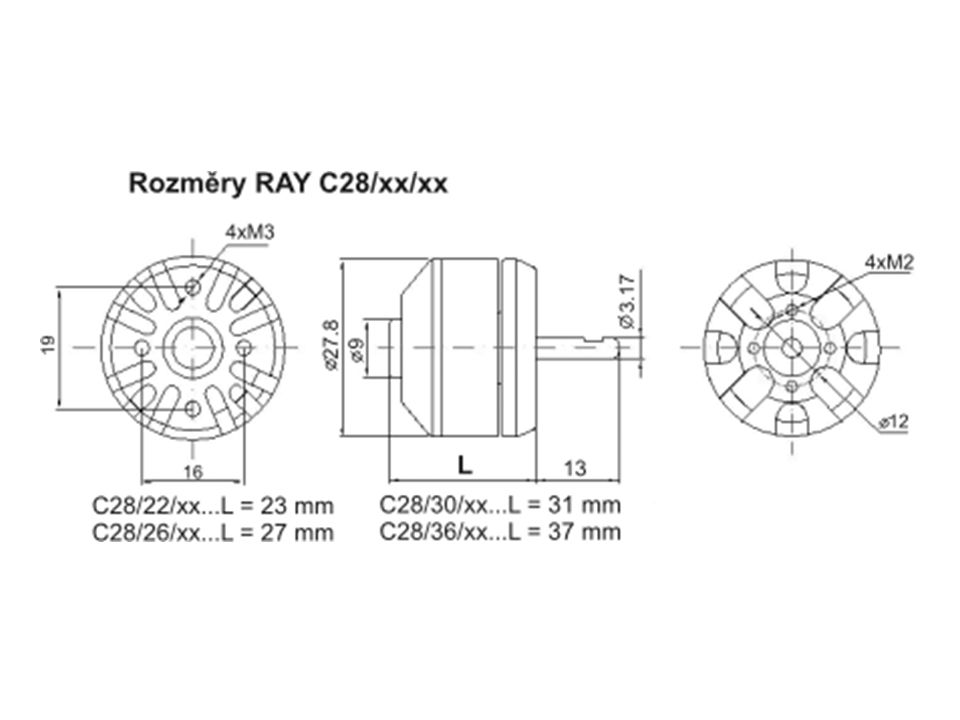
Motor Modelářský motorek Velký výkon a nízká váha Snadné připevnění k tělu Menší otáčky

11
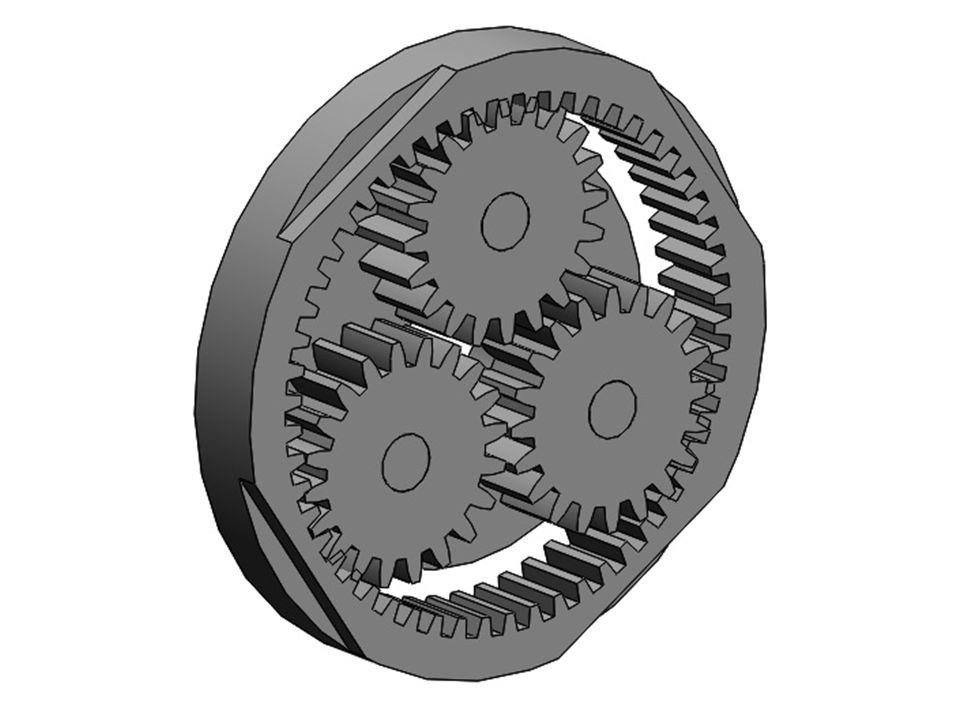
Planetová převodovka Součástky z AKU šroubováků Pouze jeden stupeň 3 planetky Zajištění pojistným kroužkem

13
Kolo Speciální pneumatika s velkou přilnavostí Vyrobeno z balzy Uhlíková tkanina Malá hmotnost

15
Závěr Délka 58,50 mm ( o ½ kratší než starší verze) Váha 240 g ( o 257 g lehčí než starší verze)
 Váha 240 g ( o 257 g lehčí než starší verze)")
17
Děkuji za pozornost Děkuji JCMM, JMK konzultantům Jarkovi Páralovi, Jiřímu Váchovi a Radkovi Šebkovi.