Stáhnout prezentaci
Prezentace se nahrává, počkejte prosím

1
Kybernetika Výkonové prvky

2
Prvky systému Akční členy jsou všechny prvky určené k využití zpracované informace. Tyto prvky jsou vždy na konci řetězce zpracování informace a patří mezi ně patří hlavně pohony a regulační orgány. Pohony jsou zařízení, která převádějí signály z členů pro zpracování informace na výchylku konající požadovanou práci s požadovaným výkonem. Pohony můžeme rozdělit na pohony určené pro ovládání: regulačních orgánů, na pohony speciální, které jsou řešeny pro každou aplikaci individuálně.

3
Podle energie, která je využitá ke konání práce pohonů, rozlišujeme pohony: elektrické, pneumatické, hydraulické. Pohony lze dále rozdělit podle výstupního signálu na: spojité (proporcionální), nespojité (dvoupolohové) Podle dráhy pohybu jejich výstupní části na části: posuvné, kyvné, rotační.
, nespojité (dvoupolohové) Podle dráhy pohybu jejich výstupní části na části: posuvné, kyvné, rotační..")
4
Podle chování v čase se dělí na: statické, astatické. Regulační orgány jsou zařízení pro ovládání energie systémem. Ne vždy je možno rozdělit akční člen na pohon a regulační orgán. Požadavky na pohony určené k řízení procesů: přímočarý pohyb pro ovládání polohy regulačních ventilů a šoupátek v rozsahu od desítek mm výše při silách od 100 N výše. úhlové vychýlení mechanizmu pro ovládání například škrtících klapek, kohoutů atd. mnohonásobný otáčivý pohyb

5
Přídavná zařízení u pohonů: zařízení definující chováni pohonu při výpadku napájecí energie (pro zjištění bezpečnosti) zařízení pro ruční ovládání regulačního orgánu identifikace skutečné polohy regulačního orgánu zabezpečení systému pohonů polohovými (případně momentovými) koncovými spínači.
 zařízení pro ruční ovládání regulačního orgánu identifikace skutečné polohy regulačního orgánu zabezpečení systému pohonů polohovými (případně momentovými) koncovými spínači.")
6
Elektrické motory Základní vlastností elektrického motoru je: závislost zatěžovacího momentu na otáčkách, způsob a rozsah ovládání otáček a jsou-li tyto otáčky konstantní či proměnné přetížitelnost motoru, tepelná a klimatická odolnost, krytí a ochrana proti úrazu elektrickým proudem a proti přídadné explozi (v mlýnech, dolech, chemičkách) podle napájecího napětí se elektrické motory dělí na motory: stejnosměrné, střídavé.
 podle napájecího napětí se elektrické motory dělí na motory: stejnosměrné, střídavé.")
7
Stejnosměrné elektromotory se dají rozdělit na motory: komutátorové, které mají komutátor zajišťující přepínání mezi póly statoru a rotoru, čímž vytváří trvalý točivý moment. Ty se dělí na motory: s cizím buzením má napájení kotvy a buzení odděleno, s permanentním magnetem, kdy na místo derivačního či cizího buzení jsou použity permanentní magnety, derivační, kdy vinutí statoru a rotoru jsou zapojena paralelně, sériové, kdy vinutí statoru a rotoru jsou zapojena v sérii, kompaudní, vzniká spojením derivačního a sériového motoru, s mechanickým komutátorem a rotorem bez železa

8
bezkomutátorové, pro něž se používá název motory EC (Electronically Commutated, elektronicky komutovaný), nebo motory BLDC (Brushless Direct Current, stejnosměrný bezkartáčový). servomotory EC jsou v podstatě synchronní motory. Na rotoru mají připevněny permanentní magnety s velkou měrnou energií, kde poloha rotoru je přesně indikována čidlem a jednotlivé fáze statoru jsou napájeny z výkonového elektronického modulu ovládaného řídicím elektronickým modulem. Rozeznávají se servomotory: s vnitřním rotorem se statorovým vinutím bez drážek

9
se statorovým vinutím v drážkách s rotujícím jhem s vnějším rotorem ploché EC motory (diskové) s vnitřním rotorem (krátký válec) s vnějším rotorem (plochý diskový tvar) motory BLDC jsou velmi podobný motoru EC. Má vinutý stator, rotor s permanentními magnety, čidlo polohy rotoru (někdy bývá k indikaci polohy rotoru využita volná fáze statoru), jednotlivé fáze statoru jsou napájeny z elektronického modulu. krokové motory
, jednotlivé fáze statoru jsou napájeny z elektronického modulu. krokové motory.")
10
Střídavé elektromotory se dají rozdělit podle fází na: jednofázové, třífázové, podle konstrukce a způsobu provozu na: synchronní, asynchronní, komutátorové, se stíněným polem, lineární.

11
Stejnosměrné komutátorové motory Stejnosměrné komutátorové motory mají komutátor zajišťující přepínání mezi póly statoru a rotoru, čímž vytváří trvalý točivý moment. Magnetické obvody těchto motorů jsou z kompaktních materiálů. Jejich použití je v oblasti malých pohonů jako v automobilech, ručním nářadí aj. Komutátorové motory obsahují komutátor, tj. kontaktní část spojenou s rotorem. Mechanický komutátor je tvořen rotačně uloženými měděnými lamelami, vzájemně oddělenými izolací, které vytvářejí s kartáči kluzný kontakt určený k přívodu elektrického proudu do rotoru.

12
Klasický komutátorový motor a jeho princip (obrázek převzat publikace z UZIMEX Praha)
")
13
K jeho odstranění jiskření se používá kondenzátor, který akumuluje větší část energie tohoto „oblouku“. Navíc chrání i napájecí obvody před přepětím, které je minimálně 5x větší než napětí napájecí. U nových motorů firmy Maxon jsou již ochranné kondenzátory zaintegrovány mezi lamelami komutátoru, jedná se o metodu CLL (capacitor long life).
..")
14
Motor s cizím buzením Motory s cizím buzením mají napájení kotvy a buzení odděleno. Napájení je možné pouze stejnosměrným napětím. Otáčky lze řídit jak změnou napájecího napětí na kotvě, tak změnou napájecího napětí na budícím vinutí. Při řízení prostřednictvím budicího vinutí nesmí dojít k nežádoucímu odbuzení, nebo k přerušení buzení. Komutátorové motory s cizím buzením se využívají zřídka. Momentová charakteristika motoru s cizím buzením je obdobná jako charakteristika derivačního motoru.

15
Motor s permanentním magnetem Motory s permanentním magnetem mají na místo derivačního či cizího buzení použity permanentní magnety. K rozvoji motorů s permanentními magnety došlo s vyvinutím permanentních magnetů s velkou měrnou energií, jako jsou slitina AlNiCo, feritové magnety, či magnety na bázi kovů vzácných zemin (SmCo a NdFeB). Momentová charakteristika těchto motoru je podobná motoru derivačnímu včetně náchylnosti na přebuzení reakcí kotvy a je závislá na energii a magnetické vodivosti použitých magnetů. Velmi používané jsou magnety na bázi vzácných zemin, které mají velmi velké hodnoty měrné energie i když jsou drahé. Otáčky motorů se řídí změnou napájecího napětí.
. Momentová charakteristika těchto motoru je podobná motoru derivačnímu včetně náchylnosti na přebuzení reakcí kotvy a je závislá na energii a magnetické vodivosti použitých magnetů. Velmi používané jsou magnety na bázi vzácných zemin, které mají velmi velké hodnoty měrné energie i když jsou drahé. Otáčky motorů se řídí změnou napájecího napětí..")
16
Tyto motory jsou nejpoužívanějšími motory v automobilové technice, v domácích spotřebičích, ve spojení s malými usměrňovači.

17
Motor s permanentním magnetem včetně momentové charakteristiky

18
Derivační motor Derivační motory mají vinutí statoru a rotoru zapojena paralelně. Tento motor může pracovat jen při napájení stejnosměrným napětím. Jeho otáčky naprázdno jsou dány budicím magnetickým tokem, proto zde není problém při nulovém zatížení motoru. Momentová charakteristika v pracovní oblasti je výrazně „tvrdá“, tzn. změna momentu má jen nepatrný vliv na otáčky. Při nadměrném zvětšení zatěžovacího momentu způsobí reakce kotvy demagnetizaci budiče a charakteristika strmě klesá.

19
Derivační motor včetně momentové charakteristiky

20
Reakce kotvy je účinek magnetického toku, který je vytvořen proudem rotoru, tj. kotvy na magnetický tok statoru. Obě dvě dílčí pole (budicí a kotvy) se skládají ve výsledné pole, které je vlivem reakce kotvy deformováno, zeslabeno a má posunutou magnetickou neutrálu vůči geometrické, což je u motoru proti směru otáčení. Magnetický tok reakce kotvy se však může vyvinout pouze pod pólovými nástavci, neboť mezera mezi póly představuje velký magnetický odpor. Pole kotvy je v prostoru nehybné, a proto jej lze kompenzovat tzv. kompenzačním vinutím.
 se skládají ve výsledné pole, které je vlivem reakce kotvy deformováno, zeslabeno a má posunutou magnetickou neutrálu vůči geometrické, což je u motoru proti směru otáčení. Magnetický tok reakce kotvy se však může vyvinout pouze pod pólovými nástavci, neboť mezera mezi póly představuje velký magnetický odpor. Pole kotvy je v prostoru nehybné, a proto jej lze kompenzovat tzv. kompenzačním vinutím..")
21
Toto vinutí se umísťuje do drážek pólových nástavců a zapojuje se do série s kotvou. Je navrženo tak, aby jím protékající proud kotvy vytvořil stejně velké pole, jako je reakční, ale opačného směru. Kompenzační vinutí je však výrobně drahé, a proto se používá pouze u velkých strojů. Vliv reakce kotvy potlačují také tzv. komutační póly, které slouží pro zlepšení komutace. Derivační motory se využívají velmi zřídka.

22
Sériový motor Sériové motory mají vinutí statoru a rotoru zapojena v sérii. U malých dvoupólových motorů je kotva často zapojena mezi dvě cívky statoru, mj. za účelem snížení nežádoucího rušení. Sériové komutátorové motory mohou pracovat při napájení proudem jak střídavým, tak stejnosměrným a proto se nazývají jakožto univerzální komutátorové motory. Lepší vlastnosti mají však při stejnosměrném napájení.

23
Sériový komutátorový motor má velký záběrný moment i proud a se snižujícím se momentovým zatížením výrazně rostou otáčky a proud klesá. Momentová charakteristika se podobá hyperbole. Jakákoliv změna zatěžovacího momentu výrazně ovlivní otáčky. Při minimálních otáčkách mají maximální moment, při odlehčení rotoru narůstají otáčky na takovou hodnotu, že by odstředivou silou mohlo dojít až k poškození vinutí rotoru, nebo ložisek. O takové charakteristice se říká, že je „měkká“. Otáčky sériového motoru lze řídit změnou velikosti napájecího napětí. Tyto motory se využívají pro pohon ručního nářadí a kuchyňských strojů.

24
Kompaudní motor Kompaudní motory vzniká spojením derivačního a sériového motoru. Hlavní póly nesou jak derivační, tak i sériové vinutí. Podle toho jak velké jsou magnetomotorické síly těchto vinutí a jakým směrem magnetují, lze dosáhnout různých tvarů charakteristik. Převládá-li sériové vinutí, tak derivační vinutí pouze zamezuje, aby se nezvýšily otáčky při úplně odlehčeném motoru. Převládá-li derivační vinutí, lze sériové vinutí využít pro zvýšení záběrového momentu. U tohoto motoru lze brzdit rekuperací.

25
Kompaudní motor

26
Motor s mechanickým komutátorem a rotorem bez železa Konvenční motory mají vinutí na železném jádru kotvy a permanentní magnety ve vnějším plášti motoru. Magnetické pole statoru se neotáčí a je buzeno permanentním magnetem. Siločáry magnetického pole procházejí obvodovým pláštěm motoru, projdou vzduchovou mezerou pro vinutí a pak jádrem v dutině uvnitř vinutí, které je na čele spojeno se statorem. Zdrojem magnetického pole statoru jsou permanentní magnety. Je však rozměrově velmi výhodné, je-li permanentní magnet uvnitř vinutí rotoru a plášť je z feromagnetického materiálu. Toho lze však oproti klasickému motoru dosáhnout jen při použití samonosného vinutí rotoru uvnitř kterého je umístěm zafixovaný permanentní magnet.

27
a) klasický motor b) s rotačním permanentním magnetem Porovnání dvou konstrukcí stejnosměrného motoru
 klasický motor b) s rotačním permanentním magnetem Porovnání dvou konstrukcí stejnosměrného motoru")
28
Siločáry ve vzduchové mezeře, ve které bude umístěno samonosné vinutí, směřují radiálně a vytvářejí tak podmínky pro vznik mechanického momentu interakcí s magnetickým polem závitů vinutí rotoru. Výsledná magnetické pole statoru a rotoru jsou navzájem natočena o 90 úhlových stupňů a tuto polohu si musí zachovat i při otáčení rotoru. Jednotlivé skupiny závitů rotoru jsou proto připojeny na lamely mechanického komutátoru a napájeny kartáči, které zachovávají polohu vzhledem k permanentnímu magnetu.

29
Konstrukce komutátorového stejnosměrného motoru se samonosným vinutím a jeho charakteristika (obrázek převzat z materiálu firmy Uzimex sro)
")
30
Lineární závislost rychlosti motoru na napájecím napětí a lineární závislost mechanického momentu na proudu ve vinutí jsou u motorů se samonosným vinutím rotoru mnohem výraznější a ve větším rozsahu rychlostí než u klasických motorů s vinutím na železném jádru. To proto, že zde odpadají setrvačné síly potřebné jak pro roztočení, tak i zastavení jádra rotoru ze skládaných plechů. Samonosné vinutí má nízkou indukčnost a velmi nízkou elektrickou časovou konstantu. Reakce motoru na změnu napájecího napětí je proto okamžitá.

31
Samonosné vinutí dodává motoru i další podstatně lepší vlastnosti, kterými vyniká nad klasickým motorem s vinutím na železném jádru. Stejnosměrný motor se samonosným vinutím rotoru od firmy Maxon je pro určitý výkon motoru menší a lehčí, neboť permanentní magnet je vložen do prostoru uvnitř dutého vinutí rotoru. Příčný rozměr dutiny, který je podstatný pro sílu magnetu, je dostatečný, aby magnet vyvodil potřebnou magnetickou indukci v mezeře s vinutím. Pro vnější část magnetického obvodu stačí tenký plášť motoru umístěný těsně nad vinutím, kde u klasického motoru jsou ještě vloženy permanentní magnety.

32
Kotva stejnosměrného motoru s opáleným komutátorem

33
Limitujícím prvkem pro životnost stejnosměrných motorů jsou kartáče a komutátor. Konec života stejnosměrného motoru je způsoben opálením kartáčů a hran lamel komutátoru jiskřením. Jiskry vznikají odpojováním segmentů vinutí při přechodu kartáčů na následující lamelu komutátoru. Proud v odpojované části vinutí vytvářel magnetické pole rotoru, které při odpojení této části zaniká. Jeho energie se mění na proud, který se uzavírá přes odcházející lamelu a kartáč jako elektrický oblouk. Oproti tomu motor se samonosným vinutím má mnohem delší životnost, protože energie zanikajícího magnetického pole u tohoto motoru nezahrnuje energii v železném jádru, čímž je podstatně nižší a jiskření je nepatrné.

34
Pro extrémně vysokou životnost pohonů s rovnoměrným chodem se používá kovových kartáčů a mezi přívody segmentů vinutí k lamelám komutátoru umísťují kondenzátory pro další omezení jiskření. Kartáče motorů se během provozu nevyměňují, protože nejsou výrazným omezujícím článkem. S jejich opotřebením je zpravidla opotřeben mechanicky i komutátor a mazivo na jeho povrchu ztrácí své mazací vlastnosti. Navíc motory od firmy Maxon mají komutátor s jedním vyvedeným koncem hřídele, který má velmi malý průměr komutátoru z čehož vyplývá nízká obvodová rychlost a tím snížené opotřebení. Komutace takovéhoto motoru bez železného jádra nebrání zvýšit rychlost otáčení nad obvyklých 3000 až 5000 ot./min, tj. až na 10000 – 15000 ot./min.

35
Kartáče se u těchto motorů používají : kovové, kde malá přítlačná síla stačí pro dokonalý elektrický kontakt. Přechodový elektrický odpor kontaktu během otáčení motoru je malý a stejnoměrný. Malé je i mechanické brždění rotoru a proud při běhu naprázdno. Motor se navíc lehce rozběhne i po dlouhé době stání. Opalování kovových kartáčů a komutátoru elektrickými oblouky na přechodu mezi lamelami komutátoru je nepatrné vzhledem k velmi nízké indukčnosti vinutí kotvy rotoru bez železa. Kovové kartáče umožňují použít k dalšímu zmenšení oblouků kondenzátory montované do čela samonosného vinutí a zapojené mezi lamely komutátoru. Je to metoda CLL (capacitor long life) firmy MAXON.
 firmy MAXON..")
36
Kovové kartáče Kartáče grafitové (obrázky převzaty z materiálu firmy Uzimex sro)
")
37
grafitové, které doléhají na válcový povrch komutátoru podstatně větší plochou než kovové kartáče a přenesou vyšší proudy, ale vyžadují větší přítlačnou sílu. Způsobí vyšší mechanické brždění rotoru a vyšší proud při běhu naprázdno. Opotřebením kartáčů vzniká grafitový prach, který sice znečistí vnitřek motoru, ale působí jako mazivo komutátoru. doléhají na válcový povrch komutátoru podstatně větší plochou než kovové kartáče a přenesou vyšší proudy, ale vyžadují větší přítlačnou sílu. Způsobí vyšší mechanické brždění rotoru a vyšší proud při běhu naprázdno. Opotřebením kartáčů vzniká grafitový prach, který znečistí vnitřek motoru, ale působí jako mazivo komutátoru. Přechodový elektrický odpor kontaktu grafitových kartáčů během otáčení motoru je nestejnoměrný a při malých proudech roste.

38
Grafitové kartáče se použijí při velkých proudech, jaké se vyskytují v aplikacích s častými rozběhy a provozem s krátkodobým přetížením velkými mechanickými momenty.

39
Motory bezkomutátorové Bezkomutátorové motory pro něž se používá název motory EC (Electronically Commutated, elektronicky komutovaný), nebo motory BLDC (Brushless Direct Current, stejnosměrný bezkartáčový). Tyto elektromotory nemají mechanický rotační komutátor, ale jejich vlastnosti jsou podobné vlastnostem komutátorových motorů. K tomuto řešení se přistoupilo proto, že kartáče a komutátor omezují délku života stejnosměrného motoru a navíc je komutátor zdrojem elektromagnetického rušení a omezuje rychlost otáčení motoru. Současně je požadováno zachování význačných vlastností stejnosměrných motorů, tj. přetížitelnost, velký záběrový moment, nízká časová konstanta a malé rozměry.

40
Výsledkem jsou stejnosměrné motory s rotorem bez železného jádra, kde mechanickou komutaci pomocí komutátoru a kartáčů zde zajišťují elektronické obvody a to buzením starorového vinutí. Rotor je pak permanentní magnet. Bezkomutátorový motor

41
Původní mechanickou komutaci pomocí komutátoru a kartáčů zajišťují elektronické obvody. Aby se dosáhlo stejných vlastností jako u klasických stejnosměrných motoru je třeba zachovat řízení vzájemné polohy magnetického pole statoru a magnetického pole rotoru. Proto bylo třeba přemístit vinutí do statoru, kde bude možno bez problému přivést elektrickou energii nyní však již bez komutátoru. A tak se stal permanentní magnet součástí rotoru. Přepínání napájecího proudu do jednotlivých částí vinutí obstarávají elektronické spínací obvody na základě informace o okamžitém úhlu natočení rotoru, což je informace získaná ze tří Hallových sond.

42
Hallovy sondy jsou součástí statoru a jsou spínány zvláštním permanentním magnetem umístěným na rotoru. Směr magnetického pole statoru tak udržuje optimální úhel vzhledem k permanentnímu magnetu rotoru obdobně jako to obstarává mechanický komutátor stejnosměrného motoru. Pokud dojde k zablokování hřídele, zastaví se směr magnetického pole statoru a působí vysokým záběrovým momentem. Díky umístění vinutí ve statoru a permanentního magnetu v rotoru lze realizovat v motoru tvaru disku nebo ve tvaru válce.

43
Nejedná se však ani o motory asynchronní či synchronní a přestože jsou napájeny stejnosměrným proudem, bývají označovány jako střídavé. Starší obdobou bezkomutátorového motoru je ve své podstatě i krokový motor se zpětnou vazbou. Podobně jako motory střídavé mají i motory EC několikafázové vinutí napájené z výkonového elektronického modulu, který je ovládán řídicími elektronickými obvody v závislosti na požadované činnosti motoru.

44
Jejich principem je, že mají 3 vinutí jsou po obvodu pláště a permanentní magnet je umístěn na hřídeli. Fungování je založena na tom, že vždy dvěma vinutími teče elektrický proud, čímž vzniká magnetické pole, odpuzující záporný pól magnetu na hřídeli a tím s hřídelí otáčí. Postupně se mění vinutí, kterými prochází elektrický proud a tak dochází k otáčení rotoru. O tom, které dvě cívky právě budou napájeny, rozhoduje regulátor. Proud prochází vždy jen dvěma vodiči vedoucími k motoru (jsou tedy buzena v každém okamžiku jen 2 statorová vinutí) a třetí je neaktivní, což zajišťuje elektronika regulátoru.
 a třetí je neaktivní, což zajišťuje elektronika regulátoru..")
45
Nevýhodou je složitější konstrukce regulátoru, jehož řídící obvody se starají o střídavé napájení vinutí u motoru. Složitější konstrukce znamená i vyšší cenu. Další výhodou je až dvojnásobý výkon oproti stejnosměrným motorům stejné velikosti. Rozvoj těchto motorů byl umožněn rozmachem elektroniky a techniky mikropočítačů, snižováním cen komponent a miniaturizací. Jejich napájení nezávisí na druhu sítě, protože vstupní obvody lze navrhnout podle potřeby pro síť stejnosměrnou i střídavou. Rozdělení a názvosloví bezkomutátorových motorů zatím není ustáleno, pracovně předpokládejme rozdělení na dvě základní skupiny: servomotory EC pro náročné aplikace motory BLD, které jsou levnější a jednodušší, ale mohou nahrazovat asynchronní a komutátorové motory.

46
Servomotory EC Servomotory EC jsou v podstatě synchronní motory. Na rotoru mají připevněny permanentní magnety s velkou měrnou energií, kde poloha rotoru je přesně indikována čidlem a jednotlivé fáze statoru jsou napájeny z výkonového elektronického modulu ovládaného řídicím elektronickým modulem. Tento modul obsahuje mikroprocesor řídící činnost tohoto motoru. Motor EC je schopen pracovat buď zcela samostatně, nebo ve spolupráci s programovatelným automatem, či přímo s počítačem. Velmi často mají nové motory EC zaintegrovaný elektronický modul přímo ve své konstrukci, čímž je zjednodušena instalace stroje. Charakteristika motoru EC je lineární, protože je tento motor řiditelný.

47
Má mnohé použití a proti nežádoucím vlivům a chybám lze aplikovat nejrůznější ochrany v programovém vybavení. Velmi důležitá je kvalita programového vybavení, které má na vlastnosti pohonu rozhodující vliv. Motory EC jsou nasazovány ve špičkových zařízeních všech stupňů automatizace a robotizace. Rozeznávají se servomotory: s vnitřním rotorem se statorovým vinutím bez drážek se statorovým vinutím v drážkách s rotujícím jhem s vnějším rotorem

48
Skladba válcového motoru EC od firmy Maxon (obrázek převzat z materiálu firmy Uzimex sro)
")
49
Konstrukční provedení EC motoru Elektronicky komutovaný motor se skládá ze: statoru, který se podobá: standardnímu statoru třífázového asynchronního (synchronního) stroje, kde je v drážkách uloženo třífázové vinutí. Statorové drážky jsou často zešikmeny zpravidla o jednu drážkovou rozteč z důvodu snížení reluktančních momentů, způsobených různou magnetickou vodivostí drážek (vzduch) a zubů (železo). samonosného vinutí podle patentu firmy Maxon.
 a zubů (železo). samonosného vinutí podle patentu firmy Maxon..")
50
rotoru, který je konstrukčně realizován: buď s magnety na povrchu, kdy nedochází ke koncentraci magnetického toku a magnetická indukce v mezeře odpovídá indukci permanentních magnetů, nebo s magnety vestavěnými uvnitř rotoru s koncentrací magnetického toku pólový mi nástavci.

51
Řešení statoru skládající se z jednotlivých segmentů Samonosné vinutí firmy Maxon (obrázek převzat z materiálu firmy Uzimex sro.)
")
52
Jako magnetických materiálů se používá často drahých vzácných zemin (samarium - kobalt) nebo levnějších tvrdých feritů, které však nemají tak dobré magnetické vlastnosti. Kvalita permanentních magnetů se porovnává podle průběhu hysterezní křivky, zejména její tzv. demagnetizační části. Magnety v rotoru diskového motoru mají 8 až 24 pólů. Cívky ve statoru jsou na samostatných pólových nástavcích. Pólové nástavce větších motorů směřují radiálně k vnějšímu prstenci s magnety. Pólové nástavce malých motorů směřují axiálně k magnetům na čele disku rotoru. Většina větších diskových motorů EC je vybavena snímačem s Hallovými sondami s obdélníkovými signály. Cívky se napájejí napětím s obdélníkovým průběhem ve třech fázích.

53
Konstrukce rotoru může být realizována s magnety na povrchu tzv. SPM (Surface-mounted Permanent Magnet). Hlavní předností je nenáročnost výroby, magnety se na rotor lepí. Druhé konstrukční řešením je realizováno s magnety umístěny uvnitř těla rotoru tzv. IPM (Internal Permanent Magnet). Výhodou tohoto řešení oproti předchozímu je větší mechanická odolnost, nevýhodu ovšem větší náročnost výroby. U obou předchozích konstrukčních uspořádání nedochází ke koncentraci mag. toku a mag. indukce v mezeře odpovídá indukci permanentních magnetů.
. Hlavní předností je nenáročnost výroby, magnety se na rotor lepí. Druhé konstrukční řešením je realizováno s magnety umístěny uvnitř těla rotoru tzv. IPM (Internal Permanent Magnet). Výhodou tohoto řešení oproti předchozímu je větší mechanická odolnost, nevýhodu ovšem větší náročnost výroby. U obou předchozích konstrukčních uspořádání nedochází ke koncentraci mag. toku a mag. indukce v mezeře odpovídá indukci permanentních magnetů..")
54
Třetí variantou je konstrukce s vestavěnými magnety s koncentrací magnetického toku pólovými nástavci. Konstrukce motoru (obrázek převzat z materiálu firmy Uzimex sro.) a) provedení SMP b) provedení IMP c) s vestavěnými magnety
 a) provedení SMP b) provedení IMP c) s vestavěnými magnety.")
55
Princip činnosti EC motoru Pro komutaci statorového stejnosměrného proudu do následujícího fázového vinutí potřebujeme snímat polohu rotoru, a to diskrétně vždy po 60°, což je dáno principem funkce elektronicky komutovaného motoru. Proto nezbytnou součástí motoru je snímač polohy rotoru (magnetický, fotoelektrický). Velmi často se používá magnetický snímač polohy rotoru s Hallovými sondami, jejichž signály se zpracovávají a slouží jako povely pro komutaci tří statorových vinutí.
. Velmi často se používá magnetický snímač polohy rotoru s Hallovými sondami, jejichž signály se zpracovávají a slouží jako povely pro komutaci tří statorových vinutí..")
56
Poloha rotoru odvozená ze signálů z Hallových sond (obrázek převzat z materiálu firmy Uzimex sro.)
")
57
Díky tomuto principu EC motoru dochází postupným spínáním jednotlivých cívek ke vzniku vnitřního momentu motoru ve směru otáčení motoru o což se přičiňují vzájemně kolmé vektory magnetických polí cívek a permanentního magnetu. Spínání cívek je přitom řízeno elektronicky pomocí výkonových spínacích tranzistorů. Otáčky EC motoru jsou pak řízeny frekvencí spínaní tranzistorů. Elektronicky komutovaný motor se chová jako stejnosměrný motor, tj. otáčky jsou úměrné napětí, které je v daném okamžiku připojeno na statorové vinutí (u klasického motoru na kotvu), připojování jednotlivých vinutí je odvozeno od polohy rotoru, na němž jsou umístěny permanentní magnety.
, připojování jednotlivých vinutí je odvozeno od polohy rotoru, na němž jsou umístěny permanentní magnety..")
58
Moment motoru je opět úměrný proudu a přepínání proudu do jednotlivých statorových vinutí se provádí bezkontaktně tranzistorovými spínači. Střední hodnota napětí v intervalu vedení proudu je řízena PWM ( pulsní šířkovou modulací). Výkonový měnič pro napájení EC motoru má obdobné zapojení jako tranzistorový měnič pro stejnosměrný motor, místo čtyř tranzistorových spínačů v zapojení jednofázového můstku má šest spínačů v trojfázovém můstkovém zapojení lišící se jen způsobem řízení. To znamená, že napájení v daném okamžiku je vždy jen dvoufázové a tvar proudu je obdélníkový.
. Výkonový měnič pro napájení EC motoru má obdobné zapojení jako tranzistorový měnič pro stejnosměrný motor, místo čtyř tranzistorových spínačů v zapojení jednofázového můstku má šest spínačů v trojfázovém můstkovém zapojení lišící se jen způsobem řízení. To znamená, že napájení v daném okamžiku je vždy jen dvoufázové a tvar proudu je obdélníkový..")
59
Trojfázové můstkové zapojení (obrázek převzat z materiálu firmy Uzimex sro.)
")
60
Komutace těchto motorů může být: obdélníková, kde jsou změny proudu skokem, kolísání momentu 14 % a snímání je možné realizovat Hallovými sondami, sinusová, kde jsou změny proudu plynulé, kolísání momentu je teoreticky 0 % a snímání je nezbytně nutné velmi přesně a to buď resolverem, nebo inkrementálním snímačem. Jedná se o obdobu třífázového napájení s proměnnou frekvencí.

61
a) obdélníková komutace b) sinusová komutace Druhy komutace (obrázek převzat z materiálu firmy Uzimex sro.)
 obdélníková komutace b) sinusová komutace Druhy komutace (obrázek převzat z materiálu firmy Uzimex sro.)")
62
Obdélníková komutace Obdélníkovou komutaci mají jednodušší řídící jednotky vytvářejí napájecí proud. K elektronické komutaci (tj. napájení jednotlivých sekcí) dochází 30° před a 30° za optimální polohou vůči rotoru. Vzájemné natočení magnetických polí rotoru a statoru se během rotace rotoru mění v uvedených mezích, než dojde k přepojení sekcí vinutí. V optimální poloze, kdy jsou směry magnetických polí kolmé, se vyvozuje největší mechanický moment, směrem od optimální ke krajním polohám klesá ve tvaru sinusovky. Obdobná činnost je i u mechanického komutátoru.
 dochází 30° před a 30° za optimální polohou vůči rotoru. Vzájemné natočení magnetických polí rotoru a statoru se během rotace rotoru mění v uvedených mezích, než dojde k přepojení sekcí vinutí. V optimální poloze, kdy jsou směry magnetických polí kolmé, se vyvozuje největší mechanický moment, směrem od optimální ke krajním polohám klesá ve tvaru sinusovky. Obdobná činnost je i u mechanického komutátoru..")
63
V modelářských regulátorech bývají nejčastěji k řízení používány procesory ATMEL, které běžně používáme. Někteří výrobci používají specializované motorové kontrolery se šesti PWM na čipu. Jinak lze použít prakticky jakýkoliv procesor.

64
Sinusová komutace Složitější řídící jednotky vytvářejí průběh proudu většinou ve tvaru sinusovky, néně často pak jako lichoběžníkový průběh. Sinusový průběh komutace odstraňuje kolísání mechanického momentu.

65
Lineární proudový regulátor Pro jednokvadrantové řízení je tvořen výkonovým tranzistorem s proudovým regulátorem. Ztráty u malých výkonů jsou malé a převažuje zde cena a slabé rušení lineární řídící jednotky. U čtyřkvadrantového řízení se použije zapojení lineárních proudových regulátorů do můstku. Jednotka je pak schopna napájet motor napětím obou polarit. Lineární zesilování je výhodné do výkonu 10 2 W, pro vyšší výkony je nehospodárné. Proto se pro řízení vyšších výkonů používá některý typ pulzní modulace.

66
4 Q lineární regulátor

67
Nevýhodou jsou zde velké ztráty na tranzistorech – viz následující příklad Ucc = 30 V I = 3 A Umot = 5 V Z toho vyplývá, že UT1 + UT2 = 25 V Příkon motoru je 15 W, ztráty na tranzistorech 75 W a účinnost napájení je cca 16%.

68
Pulzní proudový regulátor Existuje několik typů pulzní modulce: pulzní kódová modulace PCM, pulzní amplitudová modulace PAM, pulzní poziční modulace PPM, pulzní šířková modulace PWM.

69
Nejčastěji se však pro řízení výkonové elektroniky používá pulzní šířková modulace - PWM. Konstantní napájecí napětí je časově rozděleno do impulsů s konstantní frekvencí a s řízenou šířkou PWM (Pulse width modulation). Při PWM regulaci zůstává velikost proudu i napětí do motoru stejná, mění se jen aktivní doba průchodu proudu motorem. Na výkonových tranzistorech dochází jen k minimálním ztrátám, protože jsou buď otevřeny nebo zavřeny. Touto modulací lze řídit i stejnosměrný komutátorový motor. Příklad zapojení regulátoru řízení otáček stejnosměrného motoru pomocí PWM signálu s obvodem NE555, jednokvadrantové řízení, řídí otáčky motoru pouze v jednom směru, obvod umožňuje řízení otáček plynulou změnou napětí na kotvě motoru, neumožňuje však reverzaci a brzdění motoru.
. Při PWM regulaci zůstává velikost proudu i napětí do motoru stejná, mění se jen aktivní doba průchodu proudu motorem. Na výkonových tranzistorech dochází jen k minimálním ztrátám, protože jsou buď otevřeny nebo zavřeny. Touto modulací lze řídit i stejnosměrný komutátorový motor. Příklad zapojení regulátoru řízení otáček stejnosměrného motoru pomocí PWM signálu s obvodem NE555, jednokvadrantové řízení, řídí otáčky motoru pouze v jednom směru, obvod umožňuje řízení otáček plynulou změnou napětí na kotvě motoru, neumožňuje však reverzaci a brzdění motoru..")
70
Příklad zapojení jednokvadrantového PWM regulátoru

71
Levnější a jednodušší řídící jednotky s PWM řídícím signálem generují obdélníkový řídící signál. Kvalitnější řídící jednotky generují signál se sinusovým, respektive s lichoběžníkovým průběhem. Generování signálu PWM je řízeno softwarově, takže pro názornost při použití třífázového stejnosměrného motoru je z modulu PWM vyvedeno šest výstupů. Pro ovládání každé jedné fáze jsou přiděleny dva výstupy z PWM jednotky. Jeden výstup ovládá kladnou a druhý zápornou půlperiodu signálu. Signál z PWM je přiveden na bázi výkonových tranzistorů. Pro každou (jednu) fázi jsou dva výkonové tranzistory. Spínací frekvence je v rozmezí asi od 1 kHz do 44 kHz.
 fázi jsou dva výkonové tranzistory. Spínací frekvence je v rozmezí asi od 1 kHz do 44 kHz..")
72
Velmi často se pohybuje spínání v rozsahu 8-10 kHz. Po přivedení signálu z PWM se tranzistory otevřou a proud teče do motoru. Vždy jsou sepnuty pouze dvě fáze po dobu odpovídající 120° elektrické otáčky v posunutí o 60°. Třetí fáze je v okamžiku, kdy jsou sepnuty ostatní dvě fáze bez napájení. V cívce této fáze se vlivem změny magnetického pole indukuje elektromotorické napětí EMF, které je přiváděno zpět do regulátoru a čehož se využívá k detekci polohy natočení rotoru vůči statoru.

73
Průběh v procesorové jednotce Princip regulace PWM a její realizace

74
4Q PWM proudový regulátor

75
Ploché EC motory (diskové) Tyto ploché EC motory tzv. diskové se dále rozlišují jako: s vnitřním rotorem (krátký válec) s vnějším rotorem (plochý diskový tvar) S integrovaným řízením Vícepólové diskové elektronicky komutované motory jsou používány v aplikacích vyžadujích malou stavební délku. Hřídel motoru je uložena v kuličkových ložiscích, prochází statorem s pólovými nádstavci a je ukončena vnějším rotorem, na kterém jsou uloženy permanentní magnety. Motory mají Hallovy sondy, které dávají informaci o poloze rotoru.
 s vnějším rotorem (plochý diskový tvar) S integrovaným řízením Vícepólové diskové elektronicky komutované motory jsou používány v aplikacích vyžadujích malou stavební délku. Hřídel motoru je uložena v kuličkových ložiscích, prochází statorem s pólovými nádstavci a je ukončena vnějším rotorem, na kterém jsou uloženy permanentní magnety. Motory mají Hallovy sondy, které dávají informaci o poloze rotoru..")
76
Napájecí napětí může mít hodnotu od 10 do 28 V. Motor pak drží otáčky 1250 do 3500 ot/min, popřípadě od 2500 do 7000 ot/min. Motor se otáčí pouze v jednom směru. Pětidrátové provedení motoru má již další vstupy a výstupy. Základem je napájecí napětí (Ucc a GND), zadání požadované hodnoty rychlosti od 0,33 V do 10,8 V, monitor rychlosti a vstup blokující koncový stupeň. Motory se vyrábí v provedení bez krytí (IP00) nebo s krytím IP40, které definuje ochranu před vniknutím cizích těles o průměru 1 mm, motor není chráněn proti vodě. Kryt zvětšuje vnější průměr zadní části motoru.
, zadání požadované hodnoty rychlosti od 0,33 V do 10,8 V, monitor rychlosti a vstup blokující koncový stupeň. Motory se vyrábí v provedení bez krytí (IP00) nebo s krytím IP40, které definuje ochranu před vniknutím cizích těles o průměru 1 mm, motor není chráněn proti vodě. Kryt zvětšuje vnější průměr zadní části motoru..")
77
EC motor s vnitřním rotorem EC motor s vnějším rotorem

78
EC motor s vnějším rotorem a enkoderem

79
Motory BLDC Motory BLDC jsou velmi podobné motoru EC. Mají vinutý stator, rotor s permanentními magnety, čidlo polohy rotoru (někdy bývá k indikaci polohy rotoru využita volná fáze statoru), jednotlivé fáze statoru jsou napájeny z elektronického modulu. Motor má vlastnostmi komutátorového stroje, kde nevýhoda omezené životnosti komponent kluzného kontaktu je odstraněna elektronickou komutací. Otáčky motoru BLDC je možné řídit změnou napájecího napětí, ovšem není možné komplexní řízení pohonu. Chová se jako stejnosměrný komutátorový motor s permanentními magnety, jehož technický život je omezen pouze životností ložisek.
, jednotlivé fáze statoru jsou napájeny z elektronického modulu. Motor má vlastnostmi komutátorového stroje, kde nevýhoda omezené životnosti komponent kluzného kontaktu je odstraněna elektronickou komutací. Otáčky motoru BLDC je možné řídit změnou napájecího napětí, ovšem není možné komplexní řízení pohonu. Chová se jako stejnosměrný komutátorový motor s permanentními magnety, jehož technický život je omezen pouze životností ložisek..")
80
Při napájení střídavým proudem je životnost motoru BLDC obdobná jako u asynchronního motoru s podstatně větší účinnosti. Jejich cena je při vyšších užitných vlastnostech ale vyšší!

81
BLDC motor s rotorem s permanentním magnetem ve tvaru válce Plášť motoru je tvořeno válcem, na jehož vnitřním povrchu je upevněno třífázové statorové vinutí. V čelech statoru jsou ložiska, kterými prochází hřídel na níž je nalisován vícepólový permanentní magnet. Motor není vybaven komutátorem. Spínání jednotlivých fází je prováděno elektronicky. Magnetický tok permanentních magnetů a vinutí se většinou uzavírá feromagnetickým prstencem pláště sendvičové konstrukce. Sendvičový prstenec pláště zmenšuje ztráty přemagnetováním a hysterezí.

82
Motor BLDC s rotorem s permanentním magnetem ve tvaru válce

83
BLDC motor s rotačním pláštěm (diskový motor) Stator motoru tvoří dynamové plechy (nelegované, dynamo, transformátorové, orientované plechy) s drážkami s pólovými nástavci. Do drážek je vloženo třífázové vinutí. Počet pólů je závislý na tom, pro jakou aplikaci je motor navrhován. V ose statoru jsou většinou dvě ložiska s trvalou tukovou náplní. Ložisky prochází hřídel, na níž je připevněn disk do něhož jsou vloženy permanentní magnety, které se při otáčení disku (rotoru) pohybují vně cívek vinutí. Tyto motory se také nazývají motory s rotačním nebo oběžným pláštěm, zkráceně oběžky, nebo diskové motory.
 pohybují vně cívek vinutí. Tyto motory se také nazývají motory s rotačním nebo oběžným pláštěm, zkráceně oběžky, nebo diskové motory..")
84
Výhodou tohoto uspořádání je lepší chlazení motoru, nevýhodou je nutnost zabezpečit motor tak, aby se rotující plášť nedostal do kontaktu s jiným předmětem. Životnost takového motoru je dána pouze životností ložisek.

85
Krokové motory Základní pojmy : krokový motor je impulsně napájený motor při čemž jeho pohyb je nespojitý a děje se po jednotlivých úsecích nebo-li krocích. K řízení krokového motoru slouží ovladač krokového motoru. ovladač krokového motoru řídí pohyb a režim chodu krokového motoru tak, že budí fáze vinutí krokového motoru v určité časové posloupnosti. Ovladač se skládá z výkonové části a komutátoru. Výkonová část je tvořena výkonovými spínacími prvky jejichž počet odpovídá počtu fází krokového motoru. Komutátor je elektronické zařízení, které na základě vstupních informací řídí spínání výkonových spínacích prvků tak, aby každému řídicímu impulsu odpovídalo natočení krokového motoru o jeden krok.

86
Ovladač musí: zajistit výkonové buzení fází motoru realizovat předepsanou časovou posloupnost buzení fází motoru krok je mechanická odezva rotoru krokového motoru na jeden řídicí impuls. Při tomto řídícím impulsu rotor vykoná pohyb z výchozí magnetické klidové polohy do nejbližší magnetické klidové polohy. velikost kroku α je úhel, který je dán konstrukcí a způsobem ovládání motoru a který odpovídá změně polohy rotoru po jednom řídicím impulsu. magnetická klidová poloha je poloha, kterou zaujme rotor nabuzeného krokového motoru, jestliže je statický úhel zátěže rovný nule.

87
statický úhel zátěže β je úhel o který se vychýlí rotor nabuzeného krokového motoru z magnetické klidové polohy při dané zátěži na hřídeli krokového motoru. statický moment Ms je moment, který je v rovnováze s kroutícím momentem působícím na hřídel stojícího buzeného krokového motoru a vychylujícím rotorem z magnetické klidové polohy o statický úhel zátěže. Maximální statický moment je při vychýlení rotoru právě o velikost kroku α. statická charakteristika krokového motoru je závislost statického momentu Ms na statickém úhlu zátěže β. otáčky rotoru jsou určeny kmitočtem kroků f k což je počet kroků/sekundu, které vykoná rotor krokového motoru. Kmitočet kroků f k musí být stejný jako řídicí kmitočet řídicího signálu f s, jinak dochází ke ztrátě kroku.

88
momentová charakteristika krokového motoru je závislost momentu Mz na kmitočtu kroků f k buzeného krokového motoru, který se otáčí a je zatěžován. Křivka b je provozní charakteristika krokového motoru. Křivka a je tzv. rozběhová charakteristika motoru pro moment setrvačnosti zátěže Jz. Momentová charakteristika krokového motoru je rozdělena na dvě oblasti: oblast I označovaná start/stop nebo rozběhová zahrnuje stavy do kterých se může krokový motor dostat z klidu bez ztráty jediného kroku. Například při zatěžovacím momentu M0 můžeme skokem přivést řídicí kmitočet f 0.

89
oblast II je oblast řízeného zrychlování krokového motoru označovaná jako oblast omezené řiditelnosti. V této oblasti je nutno plynule zvyšovat řídicí kmitočet aby nedocházelo ke ztrátě kroku. Například při zatěžovacím momentu M0 lze při plynulém zvyšování řídicího kmitočtu z hodnoty f 0 dosáhnout až hodnoty f2. Kmitočet f 3 je nejvyšší provozní, řídicí kmitočet, při kterém krokový motor bez zátěže je schopen se otáčet v jednom smyslu. Motor se na tento kmitočet může rozběhnout nebo z něj zastavit bez ztráty kroku. Mmax je nejvyšší provozní moment, kterým může být krokový motor zatížen.

90
Momentová charakteristika krokového motoru

91
Krokový motor je speciální druh mnohapólového synchronního motoru. Využívá se především tam, kde je třeba přesně řídit nejen otáčky, ale i konkrétní polohu rotoru. Pokud se motory nepřetěžují, lze se obejít bez zpětné vazby o změně natočení – stačí počítat kroky. Nachází uplatnění v přesné mechanice, regulační technice, robotice a podobných oborech. Závažnější nedostatek je trvalý odběr proudu i když se motor netočí a nepříliš výhodný poměr výkonu (kroutícího momentu) vůči hmotnosti motoru.
 vůči hmotnosti motoru..")
92
Princip krokového motoru Celková sestava krokového motoru

93
Složení krokového motoru statorové vinutí vlastní rotor

94
V současné technické praxi se používá tří druhů krokových motorů: krokové motory s pasivním rotorem mají vinutí pouze na statorové části motoru. Rotor je v případě pasivního rotoru tvořen svazkem plechů nalisovaných na hřídel. Plechy mají tvar, který tvoří pólové nástavce. Motory s pasivním rotorem mohou být tří a vícefázové. Prakticky se používají čtyři nebo pět fází. krokové motory s aktivním rotorem obsahují permanentní magnet a dále se dělí na mototy s: radiálně polarizovaným magnetem mají velikost kroku větší než 15°

95
krokové motory s odvalujícím se rotorem se dosahuje nejlepších hodnot ukazatele poměru provozního momentu k objemu motoru, který je dvakrát větší než u motorů s axiálně polarizovaným permanentním magnetem. Jsou vhodné pro realizaci velmi malých kroků – zlomky stupně. Dosahují velmi vysokých provozních kmitočtů (desítky kHz) a velkých přesností krokování při příznivých dynamických vlastnostech. Na výše uvedeném obrázku je krokový motor s 200 kroky na otáčku což odpovídá 1.8°/krok. Stator krokového motoru je tvořen sadou cívek. Pólové nástavce statoru jsou vroubkovány axiálně polarizovaným magnetem jsou nejrozšířenějším druhem krokových motorů. Konstruují se s velikostí kroku od 0,36 do 5° a mají při stejném objemu asi 2x větší moment, než motory s pasivním rotorem.
 a velkých přesností krokování při příznivých dynamických vlastnostech. Na výše uvedeném obrázku je krokový motor s 200 kroky na otáčku což odpovídá 1.8°/krok. Stator krokového motoru je tvořen sadou cívek. Pólové nástavce statoru jsou vroubkovány axiálně polarizovaným magnetem jsou nejrozšířenějším druhem krokových motorů. Konstruují se s velikostí kroku od 0,36 do 5° a mají při stejném objemu asi 2x větší moment, než motory s pasivním rotorem..")
96
Pokud mají stejnou rozteč jako je rozteč magnetů na rotoru, což zvyšuje přesnost motoru při stejném počtu cívek. Rotor je tvořen hřídelí usazenou na kuličkových ložiskách a prstencem permanentních magnetů. Krokové motory jsou často používány jako výkonové prvky elektrických pohonů pro nastavování polohy a rychlosti bez zpětné vazby. Oblast použití sahá od jednoduchých pohybů od bodu k bodu přes rychlé časově krátké posuvy až k přesným dvou a tří osovým polohovacím robotům. Dalšími aplikacemi jsou systémy řízení otáček s realizací přímého pohonu vřetene strojů, pohonů různých dávkovačů, čerpadel, navíječek apod.

97
Při uvádění do provozu nepotřebují náročné nastavování parametrů regulátorů s relativní nezávislostí na zatížení a připojených momentech setrvačnosti. Charakteristickou vlastností motoru je otáčení hřídele po krocích. Jedna otáčka je složena z pevně definovaného počtu kroků, který odpovídá konstrukci a způsobu řízení. Takže se nehovoří o rychlostech otáčení (otáčkách), ale o frekvenci krokování. Motory využívají svůj maximální moment již od nejnižší rychlosti, což je jedna z jejich specifických vlastností.
, ale o frekvenci krokování. Motory využívají svůj maximální moment již od nejnižší rychlosti, což je jedna z jejich specifických vlastností..")
98
Není třeba je s výjimkou kontroly krajní meze kontrolovat, protože každý krok je dán určitým úhlem natočení rotoru, což v případě lineárního posuvu se jedná vždy o konkrétní délku odpovídající počtu kroků. V případě chyby však zde vzniká problém, neb zde není žádná zpětná vazba. Jejich základním principem je pohyb rotoru o jeden krok, který je definován jako mechanická odezva rotoru krokového motoru na jeden řídící impuls řídící jednotky. Při tom vykoná rotor pohyb z výchozí magnetické klidové polohy do nejbližší magnetické klidové polohy. Změna polohy se dosahuje změnou napájení vinutí jednotlivých fází statoru. Po sepnutí určité fáze se rotor snaží natočit tak, aby výsledný magnetický odpor byl minimální.

99
U nezatíženého motoru se tedy sesouhlasí poloha zubů statoru a rotoru. V této poloze má motor nulový statický vazební moment a při vychýlení vnější zátěží moment stroje narůstá a maximální hodnota statického vazebního momentu odpovídá natočení o čtvrtinu kroku. Řídící kmitočet je definován jako kmitočet řídícího signálu v Hz nebo v kHz. Kvůli přechodovým magnetickým jevům je však omezena rychlost otáčení motoru podle typu motoru a jeho zatížení a to na několik stovek kroků za sekundu. Při překročení této maximální rychlosti, nebo při příliš velké zátězi motory začínají ztrácet kroky.

100
Vlastnosti krokových motorů U krokových motorů s pasivním rotorem je typická relativně malá velikost kroku (většinou 1 až 5°). Provozní momenty od jednotek m.Nm až do 1,5 Nm. Nejvyšší rozběhový kmitočet je od několika kHz u nejmenších až do několika desítek Hz u největších motorů. Mají však jednoduchou a levnou konstrukci. Krokové motory s permanentním magnetem mají složitější magnetický obvod a jsou tudíž dražší. Mají širší pásmo provozních kmitočtů. Pásmo provozních kmitočtů je několik kHz a u některých speciálních aplikací až desítky kHz.

101
Ovladače krokových motorů Ovladač musí v plnit dva důležité požadavky: musí vytvořit předepsanou časovou posloupnost buzení fází motoru, zajistit jmenovitou hodnotu proudu v sepnuté fázi krokového motoru. Ovladač může plnit ještě další funkce - například provoz v režimu synchronního motoru s velkým regulačním poměrem. Součástí každého krokového motoru musí být elektronický komutátor spolu s výkonovým zesilovačem. Poté je pomocí změny frekvence generátoru možno dosáhnout změny otáček krokového motoru. Frekvence řídícího signálu je v rozsahu od jednotek Hz po kHz.

102
Dále je možno zcela jednoduše dosáhnout naprosto synchronního chodu dvou motorů, popřípadě přesně definovaného vzájemného pohybu dvou i více motorů. Díky tomu krokové motory při značné jednoduchosti zajišťují spolehlivý a přesný chod. V jednoduchých aplikacích jsou používány dvoufázové krokové motory (bipolární řízení). V pohonech s mikrokrokovým pohybem mají uplatnění pětifázové motory. Používání třífázových krokových motorů je výhodné proto, že v sobě slučují všechny nejlepší vlastností používaných dvoufázových a pětifázových motorů. Mají asi o 40% vyšší výkon a navíc díky vyšší účinnosti jsou rozměrově menší při stejném kroutícím momentu.
. V pohonech s mikrokrokovým pohybem mají uplatnění pětifázové motory. Používání třífázových krokových motorů je výhodné proto, že v sobě slučují všechny nejlepší vlastností používaných dvoufázových a pětifázových motorů. Mají asi o 40% vyšší výkon a navíc díky vyšší účinnosti jsou rozměrově menší při stejném kroutícím momentu..")
103
Při navrhování pohonu s krokovými motory pro danou aplikaci se vybírá motor podle rozběhových a provozních charakteristik, jenž udává výrobce pro daný typ motoru. Rozběhová charakteristika udává mezní frekvenci, jakou se motor může při daném zátěžném momentu rozběhnout nebo zastavit bez ztráty kroku, a to při skokové změně rychlosti - tedy bez rozběhové rampy. Na vyšší rychlost se motor s takovou zátěží rozběhne jen po rampě.

104
Při rozběhu pohonu nesmí být překročena hodnota řídící frekvence (tj. rychlosti otáčení) právě podle rozběhové charakteristiky. Tato charakteristika platí pro motor s připojeným konkrétním momentem setrvačnosti a zatížený příslušným momentem. Překročení těchto parametrů vede ke ztrátě kroku a tím díky absenci zpětné vazby ke ztrátě informace o poloze rotoru. Stejné zásady platí i pro zastavování motoru. Provozní charakteristika nám udává mezní moment, který jsme schopni s motorem na dané frekvenci vyvinout. Motor zatížený vyšším momentem se nerozeběhne ani po rozběhové rampě a opět ztrácí krok.
 právě podle rozběhové charakteristiky. Tato charakteristika platí pro motor s připojeným konkrétním momentem setrvačnosti a zatížený příslušným momentem. Překročení těchto parametrů vede ke ztrátě kroku a tím díky absenci zpětné vazby ke ztrátě informace o poloze rotoru. Stejné zásady platí i pro zastavování motoru. Provozní charakteristika nám udává mezní moment, který jsme schopni s motorem na dané frekvenci vyvinout. Motor zatížený vyšším momentem se nerozeběhne ani po rozběhové rampě a opět ztrácí krok..")
105
Řízení krokových motorů Řízení krokových motorů lze realizovat: bipolárně u dvoufázových krokových motorů unipolárně u ostatních krokových motorů lze ještě realizovat: řízení s plným krokem řízení s polovičním krokem

106
Bipolární řízení u dvoufázových krokových motorů Při bipolárním řízení prochází proud vždy dvěma protilehlými cívkami, které jsou zapojené tak, že mají navzájem opačně orientované magnetické pole. Motor sice v tomto režimu poskytuje větší kroutící moment, ale za cenu vyšší spotřeby. Pro řízení jsou zapotřebí 2 můstky (například H-můstek L293D), tj. pro každou větev jeden. K řízení je zapotřebí složitější zapojení a větší počet kontrolních linek, které lze zredukovat buď přídavnou logikou či použitím mikrokontroleru. Upozornění: Při konstrukci budiče z diskrétních součástek se nesmí zapomenout na ochranné diody.
, tj. pro každou větev jeden. K řízení je zapotřebí složitější zapojení a větší počet kontrolních linek, které lze zredukovat buď přídavnou logikou či použitím mikrokontroleru. Upozornění: Při konstrukci budiče z diskrétních součástek se nesmí zapomenout na ochranné diody..")
107
Unipolární řízení tří a vícefázových krokových motorků

108
Bipolární řízení dvoufázového krokového motoru

109
Unipolární řízení krokových motorů Při unipolárním řízení prochází v jednom okamžiku právě jednou cívkou (při řízení s plným krokem). Motor s tímto buzením má nejmenší odběr, ale také poskytuje nejmenší kroutící moment. Výhodou tohoto řešení je jednoduché zapojení řídící elektroniky - v podstatě stačí jeden tranzistor na každou cívku. Pro se bude používat řízení s plným krokem, pak například pro řízení třífázového motoru platí sekvence spínání fází :

110
Spínání fází třífázového krokového motoru s pasivním rotorem

111
Řízení s plným krokem znamená, že na jednu otáčku je potřeba přesně tolik kroků, kolik zubů má stator daného motoru. Dosáhneme ho použitím kterékoliv doposud uvedené metody řízení. Řízením s polovičním krokem dosáhneme dvojnásobné přesnosti. Pro sekvenci spínání fází řízení s polovičním krokem u třífázového krokového motoru pak platí:

112
Spínání fází s polovičním krokem třífázového krokového motoru s pasivním rotorem

113
Krokové motory s aktivním rotorem - s radiálně polarizovaným permanentním magnetem U těchto krokových motorů je rotorová část magnetického obvodu tvořena permanentním magnetem. Na obvodu rotoru se střídají severní a jižní póly a jejich počet je poloviční než počet pólů statoru. Počet pólů statoru je dále dělitelný čtyřmi. Statorové vinutí je navinuto dvoufázově a při spínání fází je nutno měnit směr proudu ve vinutích. Jestliže fáze fáze krokového motoru budou napájeny impulsy podle obrázku dojde k pootočení rotoru po krocích.

114
Tyto krokové motory mají složitější magnetický obvod následkem čehož jsou dražší. Provozní moment je pouze jednotky Nm. Velikost kroku je velká a časová konstanta vinutí je malá, protože v magnetickém obvodu je zařazen permanentní magnet. Z toho vyplývá, že je možno dosáhnout vyšších provozních kmitočtů (až desítky KHz) než u motorů s pasivním rotorem.
 než u motorů s pasivním rotorem..")
115
Magnetický obvod dvoufázového KM s radiálně polarizovaným magnetem a průběh budícího proudu ve fázích krokového motoru s radiálně polarizovaným magnetem

116
Krokové motory s aktivním rotorem - s axiálně polarizovaným permanentním magnetem Rotor motoru je tvořen dvěmi pólovými nástavci nalisovanými na hřídelí z nemagnetického materiálu. Pólové nástavce jsou složeny z plechů. Mezi nimi je uložen axiálně polarizovaný permanentní magnet, který je uložen tak, aby každý pólový nástavec měl jinou magnetickou polaritu. Rotorové pólové nástavce mají po obvodu zuby jejichž počet určuje velikost kroku. Rotorové pólové nástavce jsou proti sobě v osovém směru natočeny o polovinu rotorové zubové rozteče. Na statoru je 8 pólů na kterých je dvoufázové čtyřpólové vinutí a které jsou opatřeny drážkováním. Počty zubů statoru a rotoru nejsou stejné a obvykle se volí počet rotorových zubů větší.

117
Fáze vinutí jsou v rytmu řídicích impulsů buzeny v určeném pořadí, čímž vzniká točivé statorové magnetické pole. Rotor sleduje toto magnetické pole tak, že se vždy nejbližší zuby rotoru nastaví do magneticky klidové polohy. Dole je jeho konstrukční uspořádání krokového motoru s axiálně polarizovaným magnetem

118
Ukázka reálného krokového motoru s axiálně polarizovaným magnetem

119
Buzení krokového motoru s axiálně polarizovaným magnetem je vždy jen dvoufázové a výkonové prvky musí umožnit, aby směr magnetického toku v jednotlivých pólech statoru bylo možno měnit. Musí být zajištěna možnost měnit směr budícího proudu v jednotlivých vinutích. To lze realizovat dvěma způsoby: pokud krokový motor obsahuje bifilární vinutí je možno použít pro buzení klasické spínací prvky, pokud krokový motor obsahuje pouze dvoufázové vinutí je nutno použít složitější buzení například pomocí můstkového zapojení.

120
Dvoufázový hybridní krokový motor s bifilárním vinutím a jeho řízení a)čtyřtaktní b) osmitaktní
čtyřtaktní b) osmitaktní")
121
Schema zapojení buzení dvoufázového krokového motoru s bifilárním vinutím je uvedeno na výše uvedeném obrázku na němž jsou uvedeny též časové průběhy sepnutí fází krokového motoru s bifilárním vinutím na základě čtyřtakního řízení i časové průběhy sepnutí fází krokového motoru s bifilárním vinutím na základě osmitaktního řízení. Takovéto krokové motory se někdy označují jako hybridní.

122
Na níže uvedeném obrázku je zapojení krokového motoru s klasickým dvoufázovým vinutím, který je nezbytně nutné napájet z výkonových prvků zapojených do můstku. Na témže obrázku jsou uvedeny časové průběhy sepnutí fází krokového motoru s dvoufázovým vinutím při čtyřtaktního řízení i časové průběhy spínání fází krokového motoru s dvoufázovým vinutím při osmitaktního řízení. Krokový motor axiálně polarizovaným permanentním magnetem je nejpoužívanější typ motoru jehož velikost kroku je v rozmezí 0,360 až 50. Provozní moment je jednotky až desítky Nm. Provozní kmitočet je jednotky až desítky kHz.

123
Dvoufázový hybridní krokový motor s klasickým dvoufázovým vinutím a jeho řízení - a) čtyřtaktní b) osmitaktní
 čtyřtaktní b) osmitaktní")
124
Mikrokrokování Při některých aplikacích je požadováno velice jemné krokování. Úhel kroku je dán konstrukcí krokového motoru a bývá v rozmezí 0,36 až 15°. Další zmenšení kroku umožňuje metoda nazývaná „mikrokrokování“ při které je možno každý krok rozdělit na určitý počet mikrokroků stejné délky. V praxi je možno krok rozdělit do maximálního počtu 64 až 128 mikrokroků. Při klasickém buzení krokového motoru teče jednotlivými fázemi proud vždy stejné velikosti. Vhodnou volbou velikostí proudů v jednotlivých fázích lze dosáhnout libovolné rovnovážné polohy mikrokroku mezi dvěma sousedními normálními kroky.

125
Na dalším obrázku je znázorněn průběh budících proudů při čtyřtaktním způsobu ovládání po jedné fázi umožňující dosáhnout 4 mikrokroků na jeden normální krok. Pro buzení je nutno použít dvouhladinový napájecí zdroj a zajistit potřebné řídicí impulsy pro řízení tohoto zdroje. V případě většího počtu mikrokroků rostou požadavky na napájecí a spínací obvody.

126
Mikrokrokování - 4 mikrokroky/fází

127
Mikrokrokování -cca 18 mikrokroků/fází

128
Lineární motory U různých aplikací na místo rotačního pohybu je třeba pracovat s pohybem lineárním, což je sice realizovatelné pomocí převodovky. Ale tam, kde je potřeba velká přesnost, dynamika, spolehivost a rychlost posuvu je převodovka málo vhodná. To je parketa pro lineární motory. Lineární motor je klasický synchronní (případně asynchronní stroj s permanentními magnety rozloženými v rovině na místo po kružnici. U klasického motoru je označení stator a rotor jasné, u linearního motoru jsou to dva ploché díly, které jsou označovány jako: stator, což je část s magnety, rotor, což je část pohybující se část s vinutím.

129
Princip lineárního krokového motoru

130
Výhody lineárních motorů – vysoká rychlost posuvu (až 20m/s) Nevýhody lineárního motoru : cena, která je větší, přívod energie, který je složitšjší, mechanická konstrukce, kdy je třeba vyřešit uchycení motoru, vzduchový polštář, na kterém se pohybuje běžec. Při pohybu běžce však nedochází k žádným mechanickým ztrátám ani opotřebení a funkci neomezuje ani malé znečištění povrchu což je zase naopak výhodou. Motory tohoto typu se vyznačují poměrně vysokou účinností a dlouhou životností a jsou prakticky bezúdržbové.

131
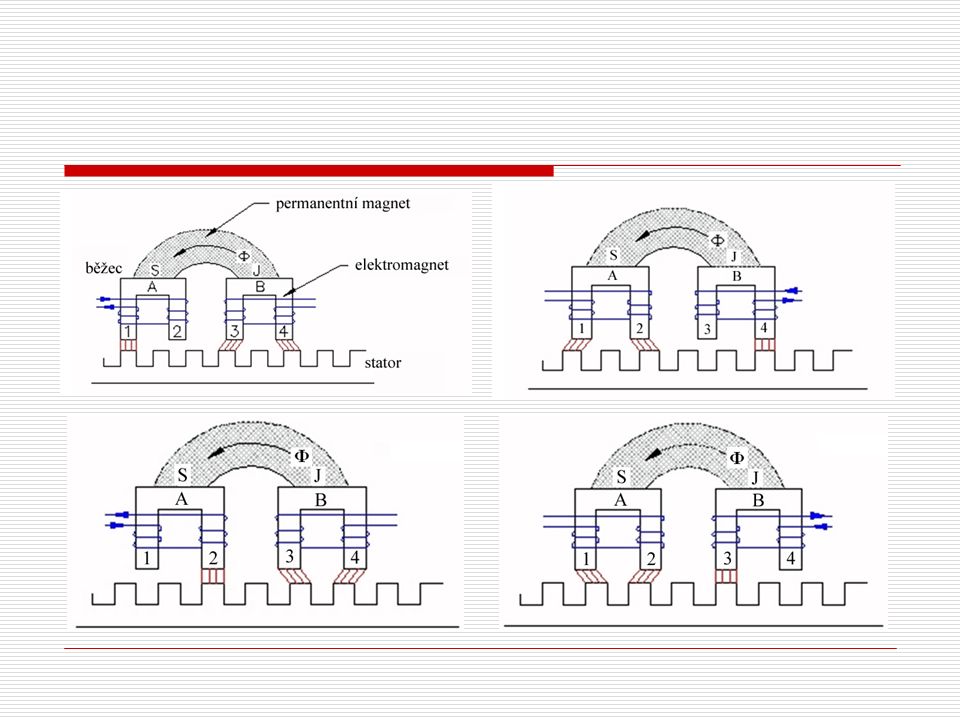
Princip dvoufázového lineárního krokového motoru Princip lineárního Sawyerova motoru, což je dvoufázový lineární krokový motor s permanentními magnety je znázorněn na níže uvedených obrázcích. Běžec je tvořen permanentním magnetem a elektromagnety A a B. Magnetický tok prochází z permanentního magnetu a elektromagnetu A přes vzduchovou mezeru do statoru, odkud se přes vzduchovou mezeru a elektromagnet B vrácí zpět do permanentního magnetu. Pokud cívkou neprochází proud, magnetický tok prochází přes oba zuby elektromagnetu, jako např. u elektromagnetu B v případě obrázek a,c. Jakmile cívkou začne protékat proud, magnetický tok prochází pouze jedním zubem elektromagnetu (obr. a). Zuby statoru a běžce jsou zarovnány a prochází jimi maximální magnetický tok, zatímco na dalším zubu je redukován na zanedbatelnou hodnotu.
. Zuby statoru a běžce jsou zarovnány a prochází jimi maximální magnetický tok, zatímco na dalším zubu je redukován na zanedbatelnou hodnotu..")
132
Princip činnosti dvoufázového lineárního krokového motoru a) c)
 c)")
134
Na obrázku a je zub 1 elektromagnetu A sesouhlasen se statorovým zubem. Pokud je proud přepnut na B, běžec se posune doprava o jednu čtvrtinu zubové rozteče tak, aby se zub 4 sesouhlasil s nejbližším statorovým zubem. (obr. b). Následně elektromagnetem B neprochází proud a elektromagnetem A prochází proud záporné polarity. To způsobí zarovnání zubu 2 se statorem (obr. c). V další fázi posunu neprochází proud elektromagnetem A a proud záporné polarity prochází elektromagnetem B (d).
. Následně elektromagnetem B neprochází proud a elektromagnetem A prochází proud záporné polarity. To způsobí zarovnání zubu 2 se statorem (obr. c). V další fázi posunu neprochází proud elektromagnetem A a proud záporné polarity prochází elektromagnetem B (d)..")
135
Ukázka skutečného lineárního krokového motoru

136
Ostatní motory

137
Jednofázové komutátorové motory Mají podobnou konstrukci a vlastnosti jako ostatní stejnosměrné stroje, které se v současné době používají především v sériovém zapojení. Liší se pouze tím, že mají magnetické obvody rotoru i statoru skládané z plechů legovaných křemíkem a to kvůli ztrátám vířivými proudy. Moment není konstantní, ale sinusově kolísá s dvojnásobnou frekvencí napájecího proudu. Mají velkou závislost otáček na zatěžovacím momentu, avšak oproti asynchronním motorům nemají omezenou hodnotu maxima otáček. Používají se hlavně u ručního nářadí a jejich jmenovité otáčky se volí kolem 10.000 ot/min i vyšší. Nevýhodou je vznik vysokofrekvenčního výboje na komutátoru, takže je nezbytné tyto výboje odrušit pomocí kondenzátorů, které vzniklou přepěťovou špičku vždy akumulují.

138
Motorek se stíněný pólem Má statorové vinutí ze dvou cívek, z nichž každá magnetizuje jeden vyniklý pól. Každý pól je rozpůlen a jeho jedna půle je obepnuta silným závitem spojeným nakrátko. Tyto závity nakrátko vytvoří točivé pole, které otáčí rotorem. Úpravou rotoru nakrátko lze docílit, že motor pracuje synchronně s frekvencí sítě. Záběrný moment a účinnost jsou malé a proto se motorku se stíněným pólem používá jen na nejmenší výkony (desítky W) – pohon hodin, zapisovačů, gramofonů atd.
 – pohon hodin, zapisovačů, gramofonů atd..")
139
Jednofázový asynchronní motor Jednofázový proud nevytvoří točivé mag.pole, nýbrž pole stojaté. Z klidu se motor sám nerozběhne. Otočí-li se s ním kterýmkoliv směrem mechanicky, roztočí se. V blízkosti synchronních otáček se chová jako trojfázový motor. Aby se motor rozběhl z klidu, má stator kromě jednofázového vinutí ještě tzv. vinutí pomocné rozběhové, dimenzované na krátkodobý chod. Toto vinutí je proti hlavnímu vinutí posunuto o 90° elektrických. Je vyrobeno z tenkého mosazného drátu a posunutí způsobuje jeho zapojení přes kondenzátor.

140
Jednofázové motory Jsou odvozeny z asynchronních motorů třífázových. Při jednofázovém napájení mají však třífázové motory nulový rozběhový moment a proto se normálně sami nemůžou rozběhnout. Rozběhu dosáhneme vřazením odporu nebo kapacity do série s pomocnou fází. Zjednodušenou konstrukcí dostaneme jednofázový asynchronní motor s hlavní a pomocným vinutím. Tyto motory jsou jednoduché, nenáročné a nevyžadují třífázový rozvod.

141
Asynchronní třífázové motory Tři fáze napětí a proudu přivedené do tří statorových vinutí motoru vytvoří kruhové točivé pole, jehož směr je určen sledem jednotlivých fází. Přehození dvou fází způsobí změnu smyslu otáčení točivého pole a tím i hřídele motoru. Rotor motoru nemá žádné vinutí, ale pouze vodivě propojenou klec – motor nakrátko. Regulaci otáček můžeme provést stupňovitě, je-li motor vybaven přepínatelnými póly, nebo změnou frekvence pomocí frekvenčního měniče.

Podobné prezentace