Stáhnout prezentaci
Prezentace se nahrává, počkejte prosím

1
4.1 s平面和z平面之间的映射 4.2 稳定性分析 4.3 稳态误差分析 4.4 时域特性分析 4.5 频域特性分析 4.6 应用实例

2
4.1.1 s平面和z平面的基本映射关系 s平面与z平面映射关系: 注意到 是2的周期函数 故有

3
s平面和z平面的具体映射关系 s平面虚轴的映射
s平面整个虚轴映射为z平面单位圆,左半平面任一点映射在z平面单位圆内,右半平面任一点映射在单位圆外。 表4-1 s平面与z平面关系 几何位置 虚轴 =0 任意值 单位圆周 =1 左半平面 <0 单位圆内 <1 右半平面 >0 单位圆外 >1

4
s平面和z平面的具体映射关系 2. 角频率ω与z平面相角θ关系 … 表4-2 角频率与z平面相角θ关系

5
s平面和z平面的具体映射关系 3. s平面上的主带与旁带 s平面上被分成了许多平行带子,其宽度为 主带 ( 任意变化) 图4-2 主带映射
( 任意变化) 图4-2 主带映射 图4-3旁带映射
 图4-2 主带映射. 图4-3旁带映射.")
6
s平面和z平面的具体映射关系 4. s平面主带的映射 图4-5 s平面主带左半平面的映射 图4-6 s平面主带右半平面的映射

7
4.1.2 s平面上等值线在z平面的映射 1. s平面实轴平行线(即等频率线)的映射 2. s平面虚轴平行线(即等衰减率线)的映射
图4-7 等频率线的映射 图4-8 等衰减率线的映射

8
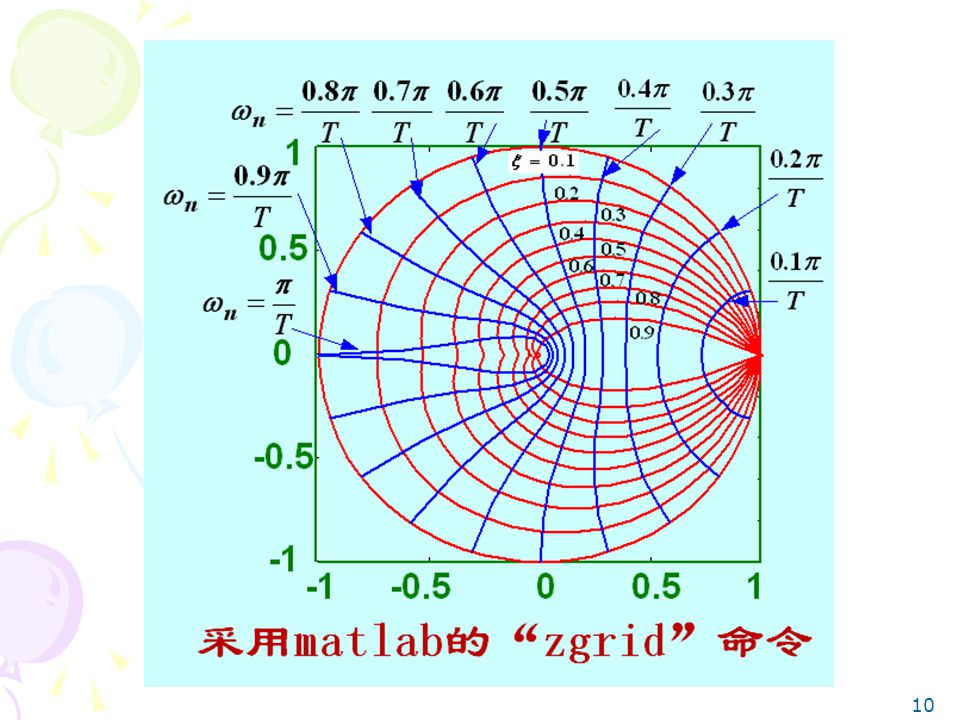
4.1.2 s平面上等值线在z平面的映射 3. s平面上等阻尼比轨迹的映射 映射至z平面 图 4-9 阻尼比线及其映射 相关公式
图 4-9 阻尼比线及其映射 相关公式 Matlab命令

9
s平面上等值线在z平面的映射 4. s平面上等自然频率轨迹的映射 s平面 z平面 所以 图4-10 等自然频率轨迹映射

11
4.1 s平面和z平面之间的映射 4.2 稳定性分析 4.3 稳态误差分析 4.4 时域特性分析 4.5 频域特性分析 4.6 应用实例

12
离散系统的稳定条件 连续系统稳定的充要条件: 特征根全部位于s域左半平面 离散系统稳定的充要条件: 特征根全部位于z平面单位圆中

13
4.2.2 稳定性的检测 1. 直接求取特征方程根 缺点是难于分析系统参数的影响 例4-2 已知 Matlab命令 r = -0.5000
0.8000 0.5000 0.4000 c=[ ]; r=roots(c) 系统稳定 例 4-3 已知 Matlab命令 g = F = [ ]; g=eig(F) 系统稳定
 系统稳定. 例 4-3 已知. Matlab命令. g = F = [ ]; g=eig(F) 系统稳定.")
14
2. 朱利代数稳定判据 —) —) —) 系统稳定条件 —)
 —) —) 系统稳定条件 —)")
15
系统稳定必要条件 或者 判断系统稳定性步骤: (1)判断必要条件是否成立,若不成立则系统不稳定。 (2)若必要条件成立,构造朱利表。
判断必要条件是否成立,若不成立则系统不稳定。 (2)若必要条件成立,构造朱利表。")
16
二阶系统稳定性条件 必要条件: 构造朱利表: 充分必要条件:

17
4.2.3 采样周期与系统稳定性 例4-5 已知一采样系统的开环传递函数
采样周期与系统稳定性 采样周期是采样系统的一个重要参数,它的大小影响特征方程的系数,从而对闭环系统的稳定性有明显的影响。 例4-5 已知一采样系统的开环传递函数 讨论采样周期对系统稳定性的影响。 系统的特征方程 解:系统稳定要求特征根位于单位圆内 结论: 当采样周期T , 使系统稳定的k值范围增大。 当k=2时,采样周期必须 小于 , 系统才能稳定

18
采样周期与系统稳定性结论: (1) 离散系统的稳定性比连续系统差
体现在使系统稳定的k值: 连续系统的k值范围大于离散系统的k值范围。 (2) 采样周期也是影响稳定性的重要参数,一般来说,T减小,系统稳定性增强。
 采样周期也是影响稳定性的重要参数,一般来说,T减小,系统稳定性增强。")
19
4.1 s平面和z平面之间的映射 4.2 稳定性分析 4.3 稳态误差分析 4.4 时域特性分析 4.5 频域特性分析 4.6 应用实例

20
4.3.1 离散系统稳态误差定义 单位反馈系统误差定义 连续系统: 离散系统:

21
4.3.2 离散系统稳态误差的计算 给定R(z)情况下的离散系统稳态误差的计算: 与输入信号R(z)及系统 结构特性均有关
情况下的离散系统稳态误差的计算: 与输入信号R(z)及系统 结构特性均有关")
22
划分系统 连续系统——按其开环传函中所含的积分环节的个数 来划分 离散系统——按其开环传函中所含 的环节的个数 来划分 ——0型 ——I型
连续系统——按其开环传函中所含的积分环节的个数 来划分 ——0型 ——I型 ——II型 离散系统——按其开环传函中所含 的环节的个数 来划分

23
1. 指令信号作用下的稳态误差计算 (1) 输入信号为单位阶跃函数 称为稳态位置误差系数 对“0”型系统, 在z=1处无极点,Kp为有限值
对“I”型系统, 在z=1处有1个极点, 若输入为阶跃信号,对单位反馈系统,系统无稳态误差的条件是系统前向通道中至少含有1个积分环节。

24
(2) 输入信号为单位斜坡信号 1. 指令信号作用下的稳态误差计算 称为稳态速度误差系数 对“0”型系统, 在z=1处无极点,
对“I”型系统, 在z=1处有1个极点, 对“II”型系统, 在z=1处有2个极点,

25
(3) 输入信号为单位加速度信号 1. 指令信号作用下的稳态误差计算 称为稳态加速度误差系数 对“0”型系统, 在z=1处无极点,
对“I”型系统, 在z=1处有1个极点, 对“II”型系统, 在z=1处有2个极点,

26
离散及连续系统稳态误差系数 误差系数 连续系统 离散系统 离散系统稳态误差 0型系统 I型系统 II型系统

27
关于稳态误差的说明 (1)计算稳态误差前提条件是系统稳定。 (2)稳态误差为无限大并不等于系统不稳定,它只表明该系统不能跟踪所输入的信号。
(3)上面讨论的稳态误差只是系统原理性误差,只与系统结构和外部输入有关,与元器件精度无关。
上面讨论的稳态误差只是系统原理性误差,只与系统结构和外部输入有关,与元器件精度无关。")
28
2. 干扰作用下的离散系统稳态误差 系统中的干扰是一种非有用信号,由它引起的输出完全是系统的误差。 误差完全由干扰n(t)引起,此时有
据终值定理,可求出系统在干扰作用下采样时刻的稳态误差

29
4.3.3 采样周期对稳态误差的影响 对具有零阶保持器的采样系统而言,稳态误差的计算与T无关,只与系统的类型、输入信号的形式有关。
采样周期对稳态误差的影响 对具有零阶保持器的采样系统而言,稳态误差的计算与T无关,只与系统的类型、输入信号的形式有关。 以下为针对不具有ZOH的采样系统的计算。 D/A本身就是一个ZOH

30
4.1 s平面和z平面之间的映射 4.2 稳定性分析 4.3 稳态误差分析 4.4 时域特性分析 4.5 频域特性分析 4.6 应用实例

31
4.4.1 离散系统动态特性指标的提法及限制条件 动态特性主要是用系统在单位阶跃输入信号作用下的响应特性来描述。 超调量 上升时间 调节时间
离散系统动态特性指标的提法及限制条件 动态特性主要是用系统在单位阶跃输入信号作用下的响应特性来描述。 超调量 图4-15 系统阶跃响应特性 图4-16 系统阶跃响应的采样 上升时间 调节时间 峰值时间

32
4.4.2 极点与零点位置与时间响应的关系 1.极点位于实轴 图 z平面极点分布与脉冲响应(实极点)
")
33
例4-7 已知数字滤波器 稳态值为A 单调收敛,很快衰减为0 振幅为 的等幅振荡脉冲

34
2.极点为复根 振荡频率: 振荡幅值与 有关

35
复极点位置与系统响应之间关系 Pi=0,脉冲响应时间最短,延时一拍 图 z平面极点分布与脉冲响应(复极点)
")
36
例4-8:试分析z平面上4对共轭复数极点对应的脉冲响应

37
4.1 s平面和z平面之间的映射 4.2 稳定性分析 4.3 稳态误差分析 4.4 时域特性分析 4.5 频域特性分析 4.6 应用实例

38
4.5.1 频域系统稳定性分析 乃奎斯特稳定判据: (1) 确定 的不稳定的极点数p; (2) 以 代入,在 范围内,画开环频率特性 ;
离散系统特征方程 乃奎斯特稳定判据: (1) 确定 的不稳定的极点数p; (2) 以 代入,在 范围内,画开环频率特性 ; (3) 计算该曲线顺时针方向包围z = –1的数目n; (4) 计算z = p – n;当且仅当z = 0时,闭环系统稳定。 注意:z平面的不稳定域是单位圆外部。
 确定 的不稳定的极点数p; (2) 以 代入,在 范围内,画开环频率特性 ; (3) 计算该曲线顺时针方向包围z = –1的数目n; (4) 计算z = p – n;当且仅当z = 0时,闭环系统稳定。 注意:z平面的不稳定域是单位圆外部。")
39
乃奎斯特稳定判据的实例说明 例4-9 某单位反馈离散系统开环传递函数 解:该开环系统稳定,所以不稳定的极点数p = 0
例4-9 某单位反馈离散系统开环传递函数 采样周期 ,试绘制它的幅相特性曲线,并分析闭环系统的稳定性。 解:该开环系统稳定,所以不稳定的极点数p = 0 当k=0.198时,频率特性不包围z=–1点,n=0,所以 z=0,故此时闭环系统稳定; 当 k=1时,频率特性包围z=–1点一次,n=1,所以 z=–1,此时闭环系统不稳定; 当k= ,频率特性穿越z= –1点,此时闭环系统为临界稳定。 幅相特性曲线

40
4.5.2相对稳定性的检验 为了检验系统在达到不稳定之前,允许提高多少增益和允许增加多少额外的相位滞后,离散时间系统引进幅值裕度和相位裕度的相对稳定性的概念(定义与连续系统相同) 利用相对稳定性两个指标,可以间接判断和检测闭环系统的动态特性,如系统快速性及振荡性等。 k= Matlab命令 w=logspace(-1,3); zG=[ ]; pG=[ ]; dbode(zG,pG,0.1,w) grid 截止频率 相位裕度 增益裕度
; zG=[ ]; pG=[ ]; dbode(zG,pG,0.1,w) grid. 截止频率. 相位裕度. 增益裕度.")
41
4.1 s平面和z平面之间的映射 4.2 稳定性分析 4.3 稳态误差分析 4.4 时域特性分析 4.5 频域特性分析 4.6 应用实例

42
4.6 应用实例 天线计算机控制系统结构图如图3-26所示。 试求该系统使系统稳定的参数D(z)=kd的范围;
试确定该系统的静态误差系数以及常值干扰Un(s) 时的稳态误差; 试确定当T=0.02s、kd =10时系统的稳定裕度; 计算T=0.02s、kd =10时 闭环系统的单位阶跃曲线,并求系统的主要动态响应指标。 解 (1) 系统传递函数
 时的稳态误差; 试确定当T=0.02s、kd =10时系统的稳定裕度; 计算T=0.02s、kd =10时 闭环系统的单位阶跃曲线,并求系统的主要动态响应指标。 解 (1) 系统传递函数.")
43
(2) 判断稳定性 根据 整理,得到
 判断稳定性 根据 整理,得到")
44
.若改变采样周期T, 考查极限放大系数kd 的变化
0.01 0.02 0.05 0.1 0.2 0.5 100.8 51.6 21.8 11.96 7.28 5.17 结论:随着采样周期的增大, 保证系统稳定的极限放大系数减小

45
(3)稳态特性分析 该系统为I型系统,位置误差系数 速度误差系数 由于干扰 所引起的输出均为误差 T=0.02s、kd =10时 稳态误差:
稳态特性分析 该系统为I型系统,位置误差系数 速度误差系数 由于干扰 所引起的输出均为误差 T=0.02s、kd =10时 稳态误差:")
46
(4)稳定裕度的计算 开环传递函数 Matlab命令 num=[0.0374 0.0351];
den=[ ]; w=logspace(-1,3); dbode(num,den,0.02,w) grid 截止频率 增益裕度 图4-21 Bode图及稳定裕度 相位裕度
![(4)稳定裕度的计算 开环传递函数 Matlab命令 num=[ ];](http://slideplayer.cz/slide/5320430/17/images/46/%284%29%E7%A8%B3%E5%AE%9A%E8%A3%95%E5%BA%A6%E7%9A%84%E8%AE%A1%E7%AE%97+%E5%BC%80%E7%8E%AF%E4%BC%A0%E9%80%92%E5%87%BD%E6%95%B0+Matlab%E5%91%BD%E4%BB%A4+num%3D%5B+%5D%3B.jpg "den=[ ]; w=logspace(-1,3); dbode(num,den,0.02,w) grid. 截止频率. 增益裕度. 图4-21 Bode图及稳定裕度. 相位裕度.")
47
(5)动态响应计算 超调量 图4-22 单位阶跃响应 峰值时间 调节时间
动态响应计算 超调量 图4-22 单位阶跃响应 峰值时间 调节时间")
48
第4章 内容结束!

Podobné prezentace

 2012 1-3.>")












 2012 1-5 捷克語(一) 2012 1-5. 第五課 第一單元 課文【】 第一單元 課文【購物 -1 Nakupování-1 】 第二單元 文法與句型 第二單元 文法與句型 【數字 Číslovky základní 】 【數字 Číslovky základní 】 【主格複數.>")
 jap. Róši 老子>")
>")

 (1239-1289) 一遍 ( 上人 ) 1221 – Džókjú no ran 承久の乱 Hógondži 宝厳寺 praxe hidžiri (Dazaifu) Kijomizudera 清水寺 1271 – Zenkódži 善光寺 rozdávání.>")
