Stáhnout prezentaci
Prezentace se nahrává, počkejte prosím

1
Prostorové spojení se selekcí dle vzdálenosti Jaroslav Dražan

2
Úvod Prostorové spojení (spatial distance) Prostorové spojení se selekcí dle vzdálenosti (distance spatial join) –Dále jen DSJ Metody zpracování DSJ
 Prostorové spojení se selekcí dle vzdálenosti (distance spatial join) –Dále jen DSJ Metody zpracování DSJ")
3
Vzdálenost Prostorové objekty –Reálná vzdálenost Dokumenty –Podobnostní funkce Multimédia a obrázky –Podobnostní funkce …

4
Motivace Nalézt k nejbližších dokumentů danému dotazu a vrátit je na výstup seřazené dle podobnosti Nalézt k nejbližších hospod od daného hotelu

5
Příklad SELECT h.jméno, r.jméno FROM Hotel h, Restaurace r ORDER BY distance(h.umístění, r.umístění) STOP AFTER k;
 STOP AFTER k;")
6
Cíle Nalézt požadované výsledky Co nejkratší doba vyhodnocení Co nejmenší plýtvání systémovými prostředky => při spojení chceme nejprve selekcí odstranit nepotřebné údaje

7
Naivní metody Nelze přímo použít, ale zajímavé myšlenky Ukazují problémy, na které lze narazit Horní mez MOK

8
Horní mez (cuttoff distance ) Nechť dopředu víme, že k nejbližších hotelů a restaurací jsou od sebe vzdáleny nejvýše D max(H,R), pak můžeme všechny vzdálenější objekty vynechat a nespojovat je. D záleží na k Je téměř nemožné získat takovouto funkci Lze dělat inkrementálně – odhadnu D, pokud nedostanu k výsledku zvětším -> vede na plýtvání systémovými prostředky

9
Provádění prostorového spojení Standardně 2 fáze –Filtrování (filtering) Vyberou se objekty, jejichž MOK se protínají (nebo, v našem případě, splňují, že oba protínají kostku Dmax x Dmax) –Vylepšení (refinement) Zjistí se skutečný průnik (platnost podmínky) - > pokud je neprázdný ( podmínka platí), objekty se spojí
 Vyberou se objekty, jejichž MOK se protínají (nebo, v našem případě, splňují, že oba protínají kostku Dmax x Dmax) –Vylepšení (refinement) Zjistí se skutečný průnik (platnost podmínky) - > pokud je neprázdný ( podmínka platí), objekty se spojí")
10
MOK (MBR) Minimální ohraničující kostky Nelze přímo použít Neplatí: –Vzdál(MOK(h1),MOK(r1)) Vzdál(h1,r1) <Vzdál(h2,r2)
 Minimální ohraničující kostky Nelze přímo použít Neplatí: –Vzdál(MOK(h1),MOK(r1)) Vzdál(h1,r1) <Vzdál(h2,r2)")
11
Pokročilé metody Indexy z R-stromů –Dvousměrné expanze uzlů –Optimalizované zametání rovinou –Adaptivní vícefázové algoritmy

12
Potřebné znalosti R – stromy –Předek obsahuje syna Lemma 1: Pro dva R-stromové indexy R a S platí, Pokud ani r prvek R, ani s prvek S nejsou kořenem, pak: –Vzdál(r,s) >= Vzdál(rodič(r),rodič(s)) –Vzdál(r,s) >= Vzdál(r,rodič(s)) –Vzdál(r,s) >= Vzdál(rodič(r),s)
 >= Vzdál(rodič(r),rodič(s)) –Vzdál(r,s) >= Vzdál(r,rodič(s)) –Vzdál(r,s) >= Vzdál(rodič(r),s)")
13
Potřebné znalosti

14
Z Lemmatu 1 plyne: Pokud při procházení od shora dolů R – stromovými indexy R a S zjistíme, že nelistové uzly r a s jsou od sebe příliš vzdáleny, pak už větve pod r a s nemusíme procházet Klíčová vlastnost pro spojování na základě R- stromových indexů

15
Spojování na základě R-stromů Procházíme indexy od shora dolů Dvojice uzlů dáváme do hlavní fronty Na začátku ve frontě dvojice kořenů indexů R a S Pokud dvojice uzlů ve frontě nejsou oba objekty, pak spárujeme potomky těchto uzlů a dáme je do hlavní fronty Pokud je jeden uzel objekt a druhý ne, pak ten objektový spárujeme s potomky toho neobjektového

16
Spojování na základě R-stromů Iteruje se, dokud je fronta neprázdná, nebo dokud to interaktivní uživatel nezastaví Procesu párování se říká expanse uzlů (node expansion) Pokud narazíme na dvojici objektů, můžeme je spojit a poslat na výstup
 Pokud narazíme na dvojici objektů, můžeme je spojit a poslat na výstup")
17
Spojování na základě R-stromů

18
Na výstup pouze k objektů (DSJ with stopping cardinality k) Navíc vzdálenostní prioritní fronta – pamatuje si nejmenší vzdálenosti mezi k doposud nalezenými objekty Pokud vzdálenost uzlů v hlavní frontě je vetší než maximální vzdálenost ve vzdálenostní frontě -> tyto uzly se nemusí porovnávat a jejich potomci také ne Prvek je do vzdálenostní fronty přidán pří expanzi uzlu, pokud vzniká dvojice objektů
 Navíc vzdálenostní prioritní fronta – pamatuje si nejmenší vzdálenosti mezi k doposud nalezenými objekty Pokud vzdálenost uzlů v hlavní frontě je vetší než maximální vzdálenost ve vzdálenostní frontě -> tyto uzly se nemusí porovnávat a jejich potomci také ne Prvek je do vzdálenostní fronty přidán pří expanzi uzlu, pokud vzniká dvojice objektů")
19
Spojování na základě R-stromů

20
Implementace –Hlavní fronta – minimová halda –Vzdálenostní fronta – maximová halda Poměrně účinná metoda, obzvláště pro malá k

21
Jednosměrná X obousměrná expanze Jednosměrná expanze –Pokud dvojice neobjektových uzlů, pak do fronty přibudou dvojice nebo opačné Obousměrná expanze –Přibudou dvojice

22
Jednosměrná X obousměrná expanze Jednosměrná –V každém kroku přibude málo dvojic (omezeno max. počtem potomků v R- stromu) –Na jeden uzel na disku se šahá vícekrát než by se muselo –Musí se vyrobit všechny možné páry uzlu r s potomky uzlu s (nebo naopak)
 –Na jeden uzel na disku se šahá vícekrát než by se muselo –Musí se vyrobit všechny možné páry uzlu r s potomky uzlu s (nebo naopak).")
23
Spojování na základě R-stromů k velké -> ze začátku dlouho velké maximum ve vzdálenostní frontě- > malá účinnost prořezávání “Pomalý start algoritmu” Neuvažovali jsme pomocné techniky –Clustrování –Bufferování clustrů Nebude blíže rozebráno

24
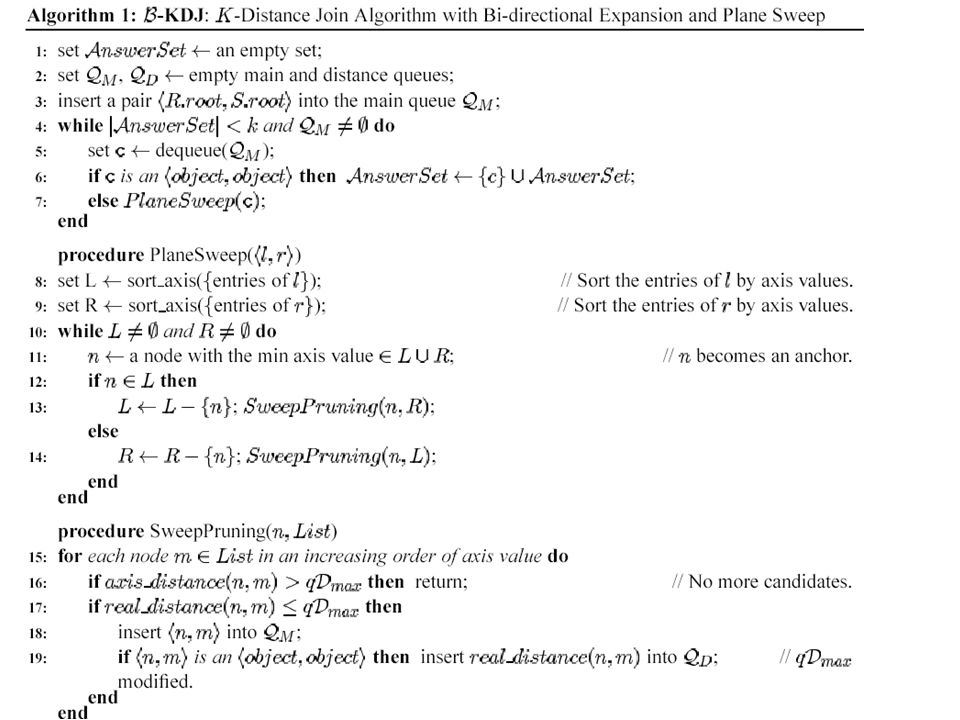
Obousměrné spojování Založeno na obousměrné expanzi Snaha o minimalizaci přístupu k uzlům R-stromů Hrozba – kartézský součin potomků uzlů r a s může produkovat více redundantních dvojic než jednosměrné spojení –Redundantní - nebude se vyhodnocovat, bude oříznuto později pomocí maxima ze vzdálenostní fronty

25
Obousměrné spojování Funguje jako předchozí algoritmus s obousměrnou expanzí Při vyjímání dvojice z hlavní fronty: pokud dvojice objektů, tak se pošlou na výstup, jinak se použije zametací (planesweep) procedura
 procedura")
27
r1 – kotva, x vybraná dimenze (sweeping direction), qDmax – maximální vybraná vzdálenost
, qDmax – maximální vybraná vzdálenost")
28
Obousměrné spojování Pro malé qD max složitost O(|r|+|s|). Pro velké O(|r| * |s|). Platí : osová vzdálenost (r,s) <= reálná vzdálenost(r,s) Používá se osová vzdálenost, neboť se snáze počítá než reálná (ta se počítá, až když není vyhnutí)
. Platí : osová vzdálenost (r,s) <= reálná vzdálenost(r,s) Používá se osová vzdálenost, neboť se snáze počítá než reálná (ta se počítá, až když není vyhnutí).")
29
Zametací osy - intuitivně Vybere se vždy ta osa, podél níž jsou ostatní uzly rozprostřeny nejvíce do šířky –Pak vznikne menší počet dvojic se vzdáleností menší než qDmax

30
Zametací osy - intuitivně Pokud by se vybrala osa x, pak se musí reálná vzdálenost počítat pro všechny uzly

31
Zametací osy - formálně Zametací index – metrika – argumenty Dvojice uzlů, qDmax –Vrací nezáporné reálné číslo –Ve vzorci – překlep – to tělo integrálu se má ještě vydělit |s| x resp. |r| x

32
Zametací osy - formálně Menší zametací index -> méně výpočtů reálných vzdáleností (menší překrytí -> menší integrály) Vybere se osa s nejmenším zametacím indexem Výpočet není tak složitý – pouze aritmetické operace (navíc se obvykle většina integrálů nuluje)
 Vybere se osa s nejmenším zametacím indexem Výpočet není tak složitý – pouze aritmetické operace (navíc se obvykle většina integrálů nuluje)")
33
Zametací osy – motivace

35
Směr zametání Rozlišujeme dopředné a zpětné zametání Dopředné –Vzestupně dle dané osy Zpětné –Sestupně dle dané osy

36
Směr zametání Projekce uzlů r, s do dané osy –Neprázný průnik, ale projekce r není podmna projekce s ani naopak (intersected) –Prázdný průnik (separated) –r obsahuje s nebo naopak (containment) Levý interval kratší než pravý -> dopřené zametání, jinak zpětné To by mělo dostat do hlavní fronty dřív bližší dvojice -> větší účinnost prořezávání
 –Prázdný průnik (separated) –r obsahuje s nebo naopak (containment) Levý interval kratší než pravý -> dopřené zametání, jinak zpětné To by mělo dostat do hlavní fronty dřív bližší dvojice -> větší účinnost prořezávání")
37
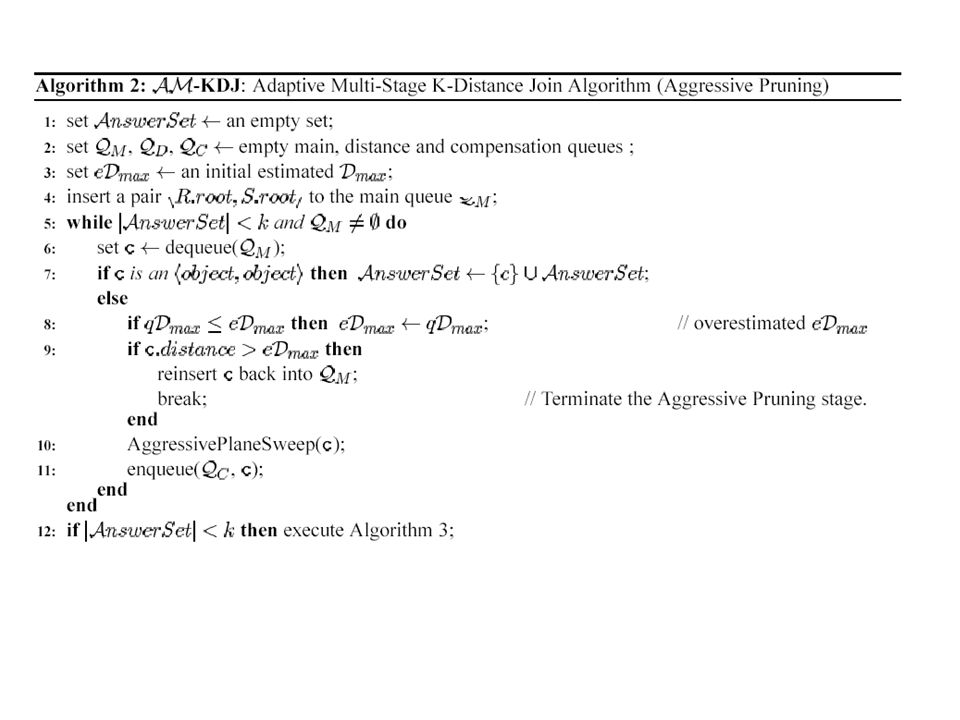
Adaptivní Vícefázové Spojení Adaptive multi-stage distance join Nevýhoda předešlého algoritmu: –qDmax je na začátku nekonečno, může klesat hodně pomalu –Způsobuje efekt zvaný pomalý start (slow start) Zhoršuje se s rostoucím k k – 100.000 – 90% času programu stráveno na nalezení 1% výsledků (1000)
 Zhoršuje se s rostoucím k k – – 90% času programu stráveno na nalezení 1% výsledků (1000)")
38
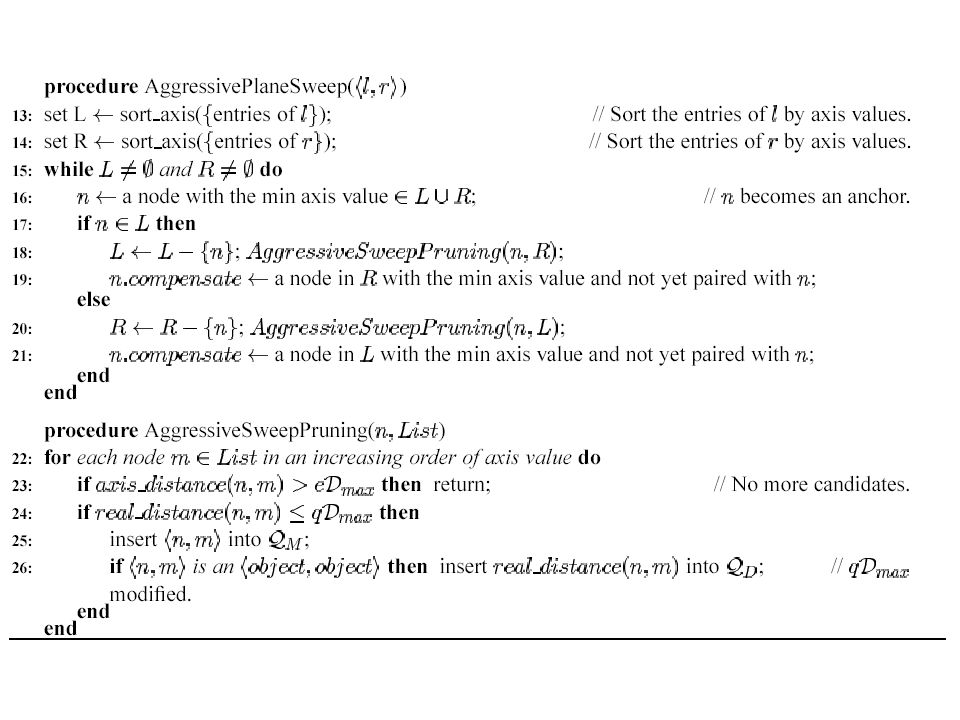
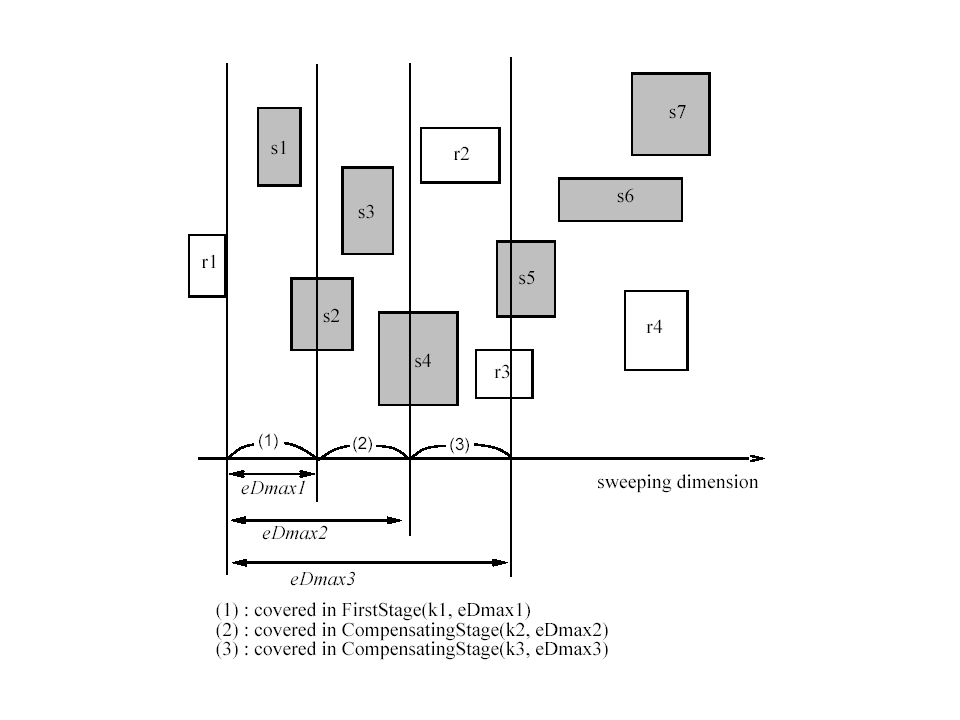
Adaptivní Vícefázové Spojení Budeme navíc používat eDmax eDmax na začátku napevno pro dané k Postupně se bude upravovat eDmax – prořezávání dle osových vzdáleností qDmax – prořezávání dle reálných vzdáleností

39
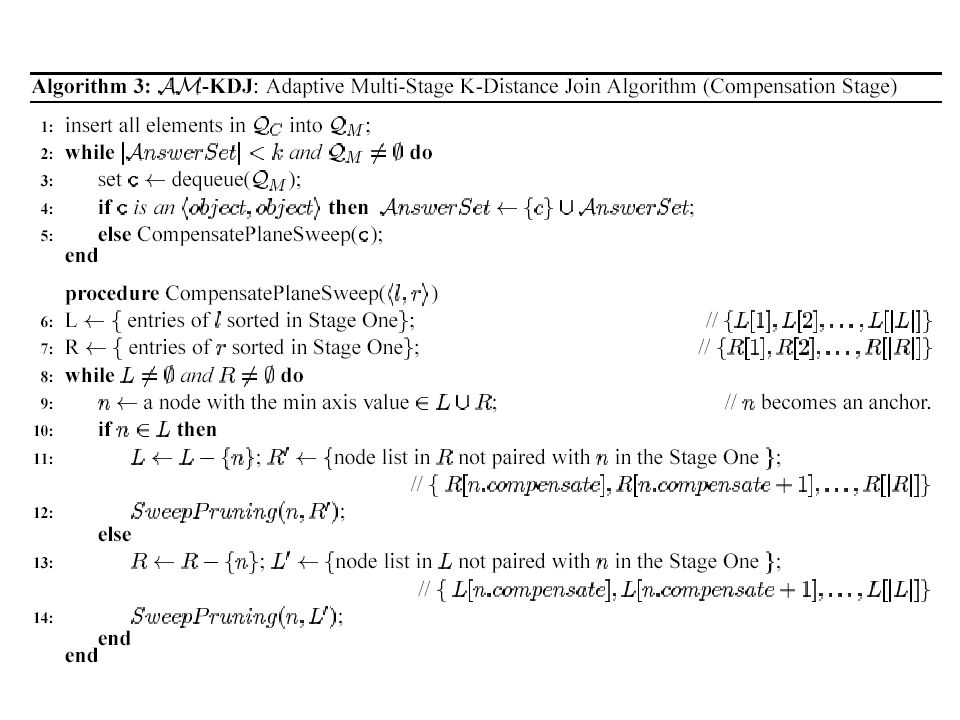
Adaptivní Vícefázové Spojení Navíc kompenzační fronta – obsahuje dvojice uzlů vybrané z hlavní fronty, jejichž vzdálenost je mezi eDmax a qDmax Pokud by agresivní prořezávání bylo moc agresivní, pak je možná oprava

43
Adaptivní Vícefázové Spojení Pokud další fáze: –Dětské uzly se netřídí znova (jsou již setříděny) –Párují se pouze dosud nespárované dvojice Řeší slow start problém Urychluje vyhledávání
 –Párují se pouze dosud nespárované dvojice Řeší slow start problém Urychluje vyhledávání")
44
Adaptivní Inkrementální Vícefázové Spojení V dynamickém prostředí (např. web) –Dokumenty se mění i během zpracování –Nelze přímo použít stávající algoritmy Nemusíme také dopředu vědět, kolik objektů uživatel chce (může si dynamicky žádat další)
 –Dokumenty se mění i během zpracování –Nelze přímo použít stávající algoritmy Nemusíme také dopředu vědět, kolik objektů uživatel chce (může si dynamicky žádat další).")
45
Adaptivní Inkrementální Vícefázové Spojení Algoritmus jako u Adaptivního vícefázového spojení Nepoužívá qDmax a vzdálenostní frontu Pokud potřeba další dokumenty, zvětší se eDmax Pokud na začátku potřeba k1 dokumentů, pak se začne s eDmax pro k1, pokud třeba v další fázi k2, pak se vezme eDmax pro k2

47
Výkonnost algoritmů HS-KDJ –algoritmus s jednosměrnou expanzí Beta-KDJ - algoritmus s obousměrnou expanzí a zametáním AM-KDJ – adaptivní algoritmus (eDmax) SJ-SORT – prostorové spojení založené na R-stromech + setřídění
 SJ-SORT – prostorové spojení založené na R-stromech + setřídění")
49
Výkonnost algoritmů SJ – SORT – není inkrementální –Pokud uživatel požaduje více a více dat, tak se jeho provádění prodlužuje lineárně, u ostatních ne (neustálý restart programu). –Dopředu známé reálné Dmax – ve skutečnosti by nešel použít

50
Shrnutí Spojení a setřídění (Dmax) Základní algoritmus s jednosměrnou expanzí – počáteční qDmax = 00 Algoritmus s obousměrnou expanzí a zametáním (qDmax) Adaptivní algoritmus s obousměrnou expanzí a zametáním (eDmax)
 Základní algoritmus s jednosměrnou expanzí – počáteční qDmax = 00 Algoritmus s obousměrnou expanzí a zametáním (qDmax) Adaptivní algoritmus s obousměrnou expanzí a zametáním (eDmax)")
51
Zdroje http://db.snu.ac.kr/~hsshin/paper/tkde.pdf Totéž, ale starší okopírovaná verze

Podobné prezentace





>")



 dle daného klíče vzestupně (od nejmenší do největší hodnoty klíče) sestupně (od největší.>")










