Stáhnout prezentaci
Prezentace se nahrává, počkejte prosím

1
Čidlo robotického vidění SOŠ a VOŠ, COP Sezimovo Ústí II, Českobudějovicka 421 Autor: Pavel Nácal Třída: ET4B Rok:2007/2008 Obor:Elektrotechnika – počítačové systémy Vedoucí práce:Ing. Vladimír Čebiš

2
firma PPT Vision Inc. kamera IMPACT A10 inteligentní kamera pro strojové vidění s integrovaným vyhodnocením, signálový procesor, paměť 256 MB RAM / 256 MB Flash, napájení 24 V DC, 3 digitální vstupy, 5 digitálních výstupů, rozhraní RS232, gigabitový ethernet, snímací prvek CMOS (1/3" formát), černobílý, rozlišení 752 x 480 bodů, jednoduché programování pomocí vývojového prostředí Impact
, černobílý, rozlišení 752 x 480 bodů, jednoduché programování pomocí vývojového prostředí Impact.")
3
Bajt = Adresa ( 1 z 128) nebo Data ( 000 0000 – 111 1111) Sériová linka RS232C Obousměrný přenos 9.600 Bd Obecný komunikační protokol
 nebo Data ( – ) Sériová linka RS232C Obousměrný přenos Bd Obecný komunikační protokol")
4
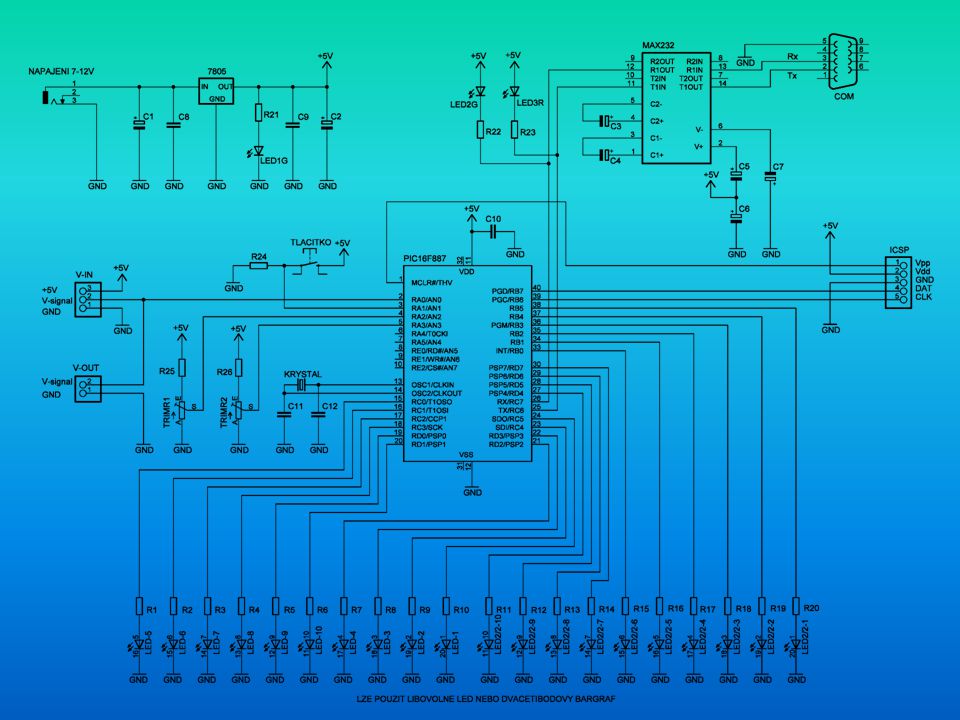
CCD kamera USART Televizní signál Jednočipový mikropočítač PIC16F887 PC bargraf

5
128 x 128 bodůHloubka rozlišení 1 bit (černá / bílá)Doba měření bodu je 400 ns X Y
Doba měření bodu je 400 ns X Y")
6
Komunikační protokol Povel 0 sejmutí 20 bodů podle zadaných souřadnic Povel 1 zatím nepoužito : : Povel 127zatím nepoužito Povel od PC Odpověď pro PC

8
Ovládací program pro demonstraci funkce

Podobné prezentace









>")



>")





