Stáhnout prezentaci
Prezentace se nahrává, počkejte prosím

1
FIFEI-02 Mechanika – kinematika a dynamika hmotného bodu
Doc. Miloš Steinhart, UPCE , ext. 6029

2
Hlavní body Úvod do mechaniky, kinematika hmotného bodu
Pohyb přímočarý rovnoměrný rovnoměrně zrychlený Pohyb křivočarý: Pohyb po kružnici Pohyb v prostoru: Vrhy. Relativní pohyb

3
Fyzika - zákony zachování
Energie : Celková energie soustavy, tedy součet všech jejích druhů se při všech dějích a interakcích zachovává. Hybnosti : Nepůsobí-li vnější síly, zachovává se při všech dějích a interakcích vektor celkové hybnosti soustavy. Momentu hybnosti Nepůsobí-li momenty vnějších sil, zachovává se při všech dějích a interakcích vektor celkového momentu hybnosti soustavy. Náboje Elektrický náboj soustavy se zachovává při všech dějích a interakcích.

4
Úvod do mechaniky Zopakujte si skalární a vektorový součin!
Budeme se zabývat klasickou mechanikou. Studované objekty nejsou mikroskopických velikostí a Pohybují se rychlostmi mnohem menšími než c. Kinematika se zabývá pouze popisem pohybu a nepátrá po jeho příčinách. Dynamika se zabývá pohybem včetně příčin a zachováním veličin. Hmotný bod má nenulovou hmotnost a zanedbatelné geometrické rozměry.

5
Kinematika I Kinematika se přednáší zvláště proto, že zde lze na známých a snadno pochopitelných představách a veličinách ilustrovat postupy řešení problémů ve složitějších oblastech. Například: Prvním krokem řešení problému je zjištění jeho skutečného rozměru a zavedení příslušných souřadnic. Obdobný aparát jako je používán u přímočarého pohybu, který lze popsat skalárně, lze aplikovat u popisu časového vývoje jiných veličin, např. koncentrace alkoholu při kvašení. Snadno se ilustruje význam integračních konstant.

6
Kinematika II Poloha hmotného bodu je určena polohovým vektorem = (x1, x2, x3). Průměrná rychlost v = s/t = celková dráha/čas. Obecně se v průběhu času mění velikost i směr. Vektor průměrné rychlosti Okamžitá rychlost (vi = dxi/dt). Má směr tečný k dráze v daném okamžiku. Zrychlení = d /dt = d2 /dt2 . (ai = d2xi/dt2). Je to “rychlost rychlosti”. Směr může být obecně různý, podle okolností.
. Má směr tečný k dráze v daném okamžiku. Zrychlení = d /dt = d2 /dt2 . (ai = d2xi/dt2). Je to rychlost rychlosti . Směr může být obecně různý, podle okolností")
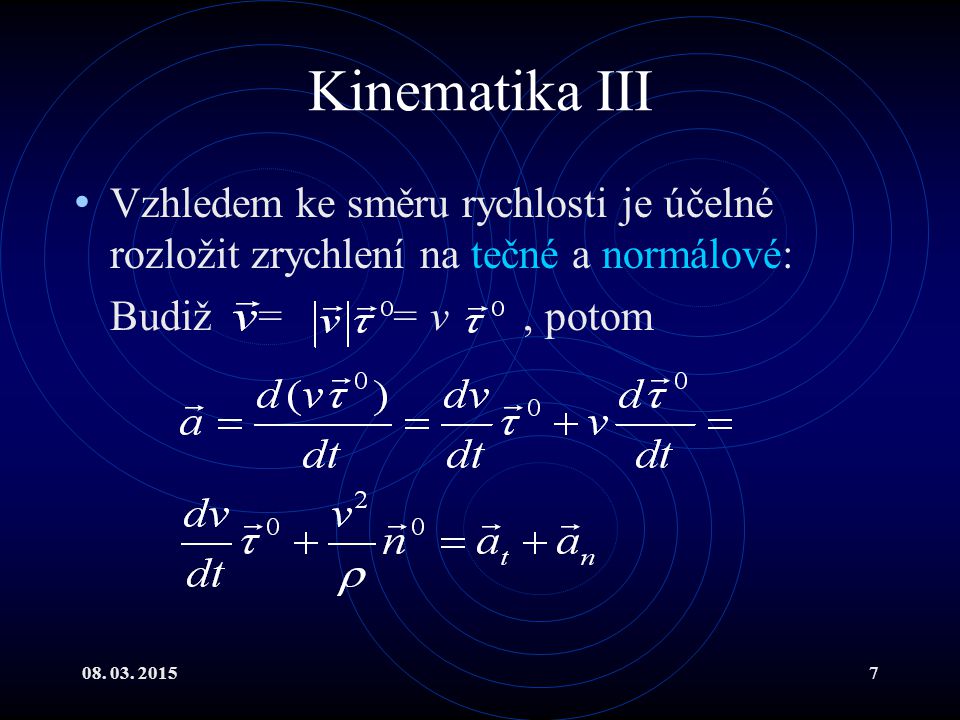
7
Kinematika III Vzhledem ke směru rychlosti je účelné rozložit zrychlení na tečné a normálové: Budiž = = v , potom
8
Kinematika IV Zde je poloměr křivosti. Je-li = , je obecně
a jedná se o pohyb přímočarý. Je-li hmotný bod v určitém místě vychýlen z přímočaré trajektorie, musí zde existovat nenulové normálové zrychlení směřující do okamžitého středu křivosti – dostředivé zrychlení. Čím menší je poloměr křivosti, tím ‘ostřejší’ je zatáčka a tím větší musí být normálové zrychlení.

9
Pohyb přímočarý I Zavádíme souřadnou soustavu tak, aby se jedna osa (např. x) ztotožňovala se směrem pohybu, potom vystačíme se skalární rychlostí v a se skalárním zrychlením a. Pozůstatkem vektorové povahy těchto veličin je jejich orientace. Pohyb rovnoměrný přímočarý v = dx/dt => x(t) = x0 + v t , kde x0 ≡ x(t=0) je integrační konstanta - počáteční podmínka: Abychom mohli popsat, kde je bod v libovolném čase, musíme znát, kde byl v jednom určitém čase, nejčastěji počátečním, ale může to být i v jiném.
 ztotožňovala se směrem pohybu, potom vystačíme se skalární rychlostí v a se skalárním zrychlením a. Pozůstatkem vektorové povahy těchto veličin je jejich orientace. Pohyb rovnoměrný přímočarý. v = dx/dt => x(t) = x0 + v t , kde x0 ≡ x(t=0) je integrační konstanta - počáteční podmínka: Abychom mohli popsat, kde je bod v libovolném čase, musíme znát, kde byl v jednom určitém čase, nejčastěji počátečním, ale může to být i v jiném")
10
Pohyb přímočarý II Pohyb přímočarý rovnoměrně zrychlený .
a = dv/dt => v(t) = v0 + a t , kde v0 ≡ x(t=0) je druhá integrační konstanta x(t) = x0 + v0 t + a t2/2 . Po druhé integraci přibyla další integrační konstanta. Počáteční podmínky jsou nyní určeny dvěma nezávislými parametry x0 a v0. Na počátečních podmínkách záleží, zda se jedná o pohyb zrychlený nebo o pohyb zpomalený!
 = v0 + a t , kde v0 ≡ x(t=0) je druhá integrační konstanta. x(t) = x0 + v0 t + a t2/2 . Po druhé integraci přibyla další integrační konstanta. Počáteční podmínky jsou nyní určeny dvěma nezávislými parametry x0 a v0. Na počátečních podmínkách záleží, zda se jedná o pohyb zrychlený nebo o pohyb zpomalený!")
11
Pohyb přímočarý III Závisí to na zrychlení a i na počáteční rychlosti v0! Je-li v0 > 0 znamená a > 0 pohyb zrychlený; a < 0 pohyb zpomalený Ale je-li v0 < 0 je tomu naopak (!) a > 0 pohyb zpomalený; a < 0 pohyb zrychlený Tedy, mají-li zrychlení a počáteční rychlost stejnou orientaci, jedná se o pohyb zrychlený, mají-li orientaci opačnou, je pohyb zpomalený.
 a > 0 pohyb zpomalený; a < 0 pohyb zrychlený. Tedy, mají-li zrychlení a počáteční rychlost stejnou orientaci, jedná se o pohyb zrychlený, mají-li orientaci opačnou, je pohyb zpomalený")
12
Pohyb křivočarý Normálová složka zrychlení musí být obecně alespoň někde nenulová a poloměr křivosti se může měnit. Speciální případ je pohyb po kružnici. Odehrává se v jedné rovině a poloměr křivosti je konstantní = r.

13
Časová závislost nemechanických veličin
Jedním z důvodů, proč se vyučuje již celkem probádaná kinematika jsou analogie kinematických a nemechanických veličin. Porozumění časových průběhů takových veličin je značně usnadněno díky tomu, že vzhledem ke každodenní zkušenosti je chápání mechanických veličin je relativně nejsnadnější. Příkladem může být radioaktivní rozpad.

14
Pohyb po kružnici I Pohyb rovnoměrný je konstantní a zrychlení směřuje neustále do jednoho středu kružnice. Je to tedy zrychlení dostředivé. Při zjednodušeném skalárním popisu ztotožníme osu otáčení s jednou z os souřadné soustavy (z). Hmotný bod prochází pravidelně kruhovou dráhu s = 2 r rychlostí o konstantní velikostí v. Doba jedné otáčky nebo-li perioda je T [s]. Počet otáček za jednotku času f = 1/T se nazývá frekvence f [s-1 Hz].
. Hmotný bod prochází pravidelně kruhovou dráhu s = 2 r rychlostí o konstantní velikostí v. Doba jedné otáčky nebo-li perioda je T [s]. Počet otáček za jednotku času f = 1/T se nazývá frekvence f [s-1 Hz]")
15
Pohyb po kružnici II Při popisu pohybů bodů zvláště v konstantní vzdálenosti od středu otáčení je výhodné požívat úhlové veličiny: ds = r d v radiánech ! v = ds/dt = r d/dt = r = 2 f = 2 / T Takto se zavádí úhlová rychlost [s-1], která je v případě rovnoměrného otáčivého pohybu konstantní.

16
Pohyb po kružnici III Po integraci dostáváme :
(t) = 0 + t s(t) = s0 + r t 0 nebo s0 jsou integrační konstanty opět dané počátečními podmínkami. Skutečná dráha a rychlost mohou záviset na čase: s(t) = r (t) v(t) = r (t)
 = 0 + t. s(t) = s0 + r t. 0 nebo s0 jsou integrační konstanty opět dané počátečními podmínkami. Skutečná dráha a rychlost mohou záviset na čase: s(t) = r (t) v(t) = r (t)")
17
Pohyb po kružnici IV Při rovnoměrném pohybu po kružnici :
Jsou průměty určitého bodu do kolmých os harmonické kmity. Tedy souřadnice hmotného bodu jsou : x(t)=cos (t) = cos(0 + t) y(t)=sin (t) = sin(0 + t) 0 se zde nazývá počáteční fáze Dostředivé zrychlení má konstantní velikost:
=cos (t) = cos(0 + t) y(t)=sin (t) = sin(0 + t) 0 se zde nazývá počáteční fáze. Dostředivé zrychlení má konstantní velikost:")
18
Pohyb po kružnici V Pohyb rovnoměrně zrychlený po kružnici.
Hmotný bod se pohybuje s konstantním tečným at a tedy i úhlovým zrychlením : = d /dt at = r Po integraci (t) = 0 + t (t) = 0 + 0 t + t2/2
 = 0 + t. (t) = 0 + 0 t + t2/")
19
Pohyb po kružnici VI Zda se jedná o pohyb rovnoměrně zrychlený nebo zpomalený, opět závisí na počátečních podmínkách, konkrétně počáteční úhlové rychlosti 0 , která určuje smysl počáteční rotace : Je-li 0 > 0 a > 0 jde o pohyb zrychlený. Při < 0 jde o pohyb zpomalený. Je-li 0 < 0 je tomu samozřejmě naopak. Situace je analogická přímočarému pohybu.

20
Pohyb po kružnici VII Protože rovina kruhové dráhy může mít různou polohu v prostoru, je nutné pro úplný popis pohybu použít vektorů Orientovaný úhel má směr normály ke kružnici, orientované tak, že je úhel vidět jako kladný nebo-li pravotočivý(!). Obdobně jsou definovány i vektory úhlové rychlosti a úhlového zrychlení .
. Obdobně jsou definovány i vektory úhlové rychlosti a úhlového zrychlení")
21
Pohyb po kružnici VIII Jedná-li se o pohyb rovnoměrně zrychlený je orientace vektorů stejná, v případě pohybu zpomaleného je jejich orientace opačná. Vektorové vyjádření rychlosti a zrychlení:

22
Pohyb v prostoru - vrhy Při obecném pohybu v prostoru je nutné pracovat s vektory a operace se provádějí ve vhodných souřadnicích. Zpravidla se daří problém zjednodušit, když využijeme symetrie a snížíme počet složek, ve kterých dochází ke změně - počet stupňů volnosti problému. Příkladem jsou vrhy v blízkosti povrchu Země, odehrávající se ve svislé rovině x, z.

23
Vrhy obecně I U všech vrhů předpokládáme:
Zrychlení působí svisle dolů a má velikost tíhového zrychlení. Je vhodné ztotožnit svislý směr s jednou osou, například : = (0, 0, -g) Volitelné počáteční podmínky jsou určeny : bodem = ( x0, y0, z0) z něhož pohyb začíná a počáteční rychlostí = (vx0, vy0, vz0)
 Volitelné počáteční podmínky jsou určeny : bodem = ( x0, y0, z0) z něhož pohyb začíná. a počáteční rychlostí = (vx0, vy0, vz0)")
24
Vrhy obecně II Obecný vrh je omezen na pohyb v určité svislé rovině. Obvyklé počáteční podmínky: = (0, 0, -g) = (vx0, 0, vz0) osa x je vodorovná = (x0, y0, z0), zpravidla volíme x0= y0 = 0 Z pedagogických důvodů se vrhy dělí podle počátečního na speciální případy.
 osa x je vodorovná. = (x0, y0, z0), zpravidla volíme x0= y0 = 0. Z pedagogických důvodů se vrhy dělí podle počátečního na speciální případy")
25
Vrh svislý I Počáteční podmínky:
= (0, 0, -g) = (x0, y0, z0), zpravidla volíme x0= y0 = 0 = (0, 0, vz0) Smysl má soustředit se jen na svislou osu z, je tu jeden stupeň volnosti : vz(t) = vz0 – g t z(t) = z0 + vz0 t – g t2/2
 = (x0, y0, z0), zpravidla volíme x0= y0 = 0. = (0, 0, vz0) Smysl má soustředit se jen na svislou osu z, je tu jeden stupeň volnosti : vz(t) = vz0 – g t. z(t) = z0 + vz0 t – g t2/")
26
Vrh svislý II Speciální případ je volný pád, je-li vz0 = 0.
Častý případ je vrh vzhůru : vz0 > 0, z0 = 0. Rychlost se zmenšuje , až dosáhne nuly v čase tm = vz0/g v horní úvrati z(tm) = v2z0/2g Pak těleso padá a rychlost je záporná. Na zem dopadne v čase tn, který je řešením rovnice z(tn) = tnvz0 –gt2n /2 = 0 => tn = 2vz0/g = 2tm. Rychlost dopadu je opačná k počáteční. Platí obecně v každé výšce! v(tn) = – vz0.
 = v2z0/2g. Pak těleso padá a rychlost je záporná. Na zem dopadne v čase tn, který je řešením rovnice. z(tn) = tnvz0 –gt2n /2 = 0 => tn = 2vz0/g = 2tm. Rychlost dopadu je opačná k počáteční. Platí obecně v každé výšce! v(tn) = – vz")
27
Vrh vodorovný I Počáteční podmínky ve vhodné s. soustavě:
= (0, 0, -g) = (x0, y0, z0), zpravidla volíme x0= y0 = 0 = (vx0, 0, 0) Pohyb je nyní nutno popsat ve dvou osách, přičemž směru svislém jde o volný pád: vz(t) = – g t z(t) = z0 – gt2 /2
 = (x0, y0, z0), zpravidla volíme x0= y0 = 0. = (vx0, 0, 0) Pohyb je nyní nutno popsat ve dvou osách, přičemž směru svislém jde o volný pád: vz(t) = – g t. z(t) = z0 – gt2 /")
28
Vrh vodorovný II Ve směru vodorovném o pohyb rovnoměrný. Rychlost je konstantní protože zrychlení má nenulovou jen svislou složku: vx(t) = vx0 x(t) = x0 + vx0 t Pohyb (v obou osách) je obvykle současně ukončen dopadem hmotného bodu na zem.
 = vx0. x(t) = x0 + vx0 t. Pohyb (v obou osách) je obvykle současně ukončen dopadem hmotného bodu na zem")
29
Vrh šikmý I Souřadnou soustavu zachováme. Poč. podmínky:
= (0, 0, -g) = (x0, y0, z0), často můžeme volit x0= y0 = 0 = (vx0, 0, vz0) Složky počáteční rychlosti se vyjadřují pomocí velikosti počáteční rychlosti v0 a elevačního úhlu , který rychlost svírá s vodorovnou rovinou : vx0 = v0 cos() vz0 = v0 sin()
 = (x0, y0, z0), často můžeme volit x0= y0 = 0. = (vx0, 0, vz0) Složky počáteční rychlosti se vyjadřují pomocí velikosti počáteční rychlosti v0 a elevačního úhlu , který rychlost svírá s vodorovnou rovinou : vx0 = v0 cos() vz0 = v0 sin()")
30
Vrh šikmý II Pohyb je opět nutno popsat ve dvou osách. Ve svislé jde o svislý vrh: vz(t) = vz0 – g t = v0 sin() – g t z(t) = z0 + v0 sin() t – g t2 /2 Ve vodorovné o rovnoměrný pohyb vx(t) = vx0 = v0 cos() x(t) = x0 + v0 cos() t
 = z0 + v0 sin() t – g t2 /2. Ve vodorovné o rovnoměrný pohyb. vx(t) = vx0 = v0 cos() x(t) = x0 + v0 cos() t")
31
Vrh šikmý III Pohyb je opět ukončen dopadem na zem. Kdy
k němu dojde je dáno počátečními podmínkami. Například pohyb zem-zem z0 = 0 , zk = 0 : z(tk) = v0 sin() t – g t2 /2 = (v0 sin() – g/2 t) t =0 tk1 = 0 … počátek pohybu tk2 = 2v0 sin() /g … konec pohybu Dolet ve vodorovné rovině : x (tk2) = x0 + 2v20 sin()cos()
 = v0 sin() t – g t2 /2 = (v0 sin() – g/2 t) t =0. tk1 = 0 … počátek pohybu. tk2 = 2v0 sin() /g … konec pohybu. Dolet ve vodorovné rovině : x (tk2) = x0 + 2v20 sin()cos()")
32
Vrh šikmý IV Horní úvrať (maximum výšky) :
vz(tm) = vz(t) = v0 sin() – g tm = 0 tm = v0 sin()/ g Dochází k ní v čase poloviny celkového letu xm(t) = x0 + v20 sin()cos() zm(t) = v20 sin2()/2g
 = vz(t) = v0 sin() – g tm = 0. tm = v0 sin()/ g. Dochází k ní v čase poloviny celkového letu. xm(t) = x0 + v20 sin()cos() zm(t) = v20 sin2()/2g")
33
Relativní poloha a rychlost I
Předpokládejme: že hmotný bod má vůči počátku souřadné soustavy I polohový vektor . Počátek souřadné soustavy I má v soustavě II polohový vektor Potom polohový vektor tohoto bodu má v soustavě II polohový vektor:

34
Relativní poloha a rychlost II
Předpokládejme: že hmotný bod má vůči počátku souřadné soustavy I rychlost . Počátek souřadné soustavy I má v soustavě II rychlost Potom vektor rychlosti tohoto bodu v soustavě II je časovou derivací předchozí rovnice:

35
Relativní poloha a rychlost III
Loď pluje kolmo na proud řeky relativní rychlostí o velikosti 1.85 ms-1. Vektor rychlosti je Řeka proudí rychlostí 1.2 ms-1 směrem na západ a vektor proudu je Jaká je rychlost lodi vůči souši ?

36
Skalární součin Ať Definice I (ve složkách) Definice II
Skalární součin je součin velikosti jednoho vektoru krát průmět velikosti vektoru druhého do jeho směru. ^

37
Dostředivé zrychlení při rovnoměrném pohybu po kružnici
Během jedné otáčky, tedy za jednu periodu T oběhne průvodič určitého bodu kružnici o poloměru r. Když umístíme počátky všech vektorů rychlosti do jednoho bodu, oběhnou za T koncové body kružnici o poloměru v. Můžeme tedy uvažovat jednoduchou analogii: ^

38
Šikmý vrh Pod jakým úhlem musíme vystřelit, aby střela dolétla při dané počáteční rychlosti co nejdále? Souřadnici doletu můžeme chápat jako funkci v0, x0 a : Hledáme extrém doletu jako funkce : ^

39
Relativní pohyb Pod jakým úhlem musí plout loď schopná vyvinout rychlost 1.85 ms-1 aby plavala kolmo vzhledem k břehu, teče-li řeka na západ rychlostí 1.2 ms-1? Západo-východní složka musí vykompenzovar rychlost řeky, tedy musí mít velikost 1.2 ms-1 a směřovat na východ : Úhel je měřen ‘fyzikálně’ od kladné části vodorovné osy. To odpovídá azimutu (N=0, E=90, S=180 a W=270): 40.44°. ^
: 40.44°. ^")
40
Vektorový součin I Ať Definice (ve složkách) Velikost vektoru
Velikost vektorového součinu je rovna obsahu rovnoběžníku tvořeného vektory

41
Vektorový součin II Vektor je kolmý k rovině vytvořené vektory a a společně vytváří pravotočivý systém. ijk = {1 (sudá permutace), -1 (lichá), 0 (eq.)} ^
, -1 (lichá), 0 (eq.)} ^")
Podobné prezentace



















