Stáhnout prezentaci
Prezentace se nahrává, počkejte prosím

1
Karel Bittner bittner@humusoft.cz www.humusoft.cz info@humusoft.cz
Informace o programech MATLAB a COMSOL Multiphysics Karel Bittner

2
HUMUSOFT s.r.o. Založeno v r. 1990, sídlo v Praze
Produkty a služby v oblasti technických výpočtů, řídicí techniky, simulace dynamických systémů a podnikových procesů MATLAB, Simulink, Stateflow Inženýrské výpočty, simulace dynamických systémů The MathWorks, Inc. WITNESS Interaktivní simulace a optimalizace podnikových procesů Lanner Group, Ltd. dSPACE - vývojové systémy dSPACE GmbH. Comsol Multiphysics Otevřený systém pro multifyzikální analýzu (metoda konečných prvků) Comsol AB Vývoj vlastního software & hardware Virtual Reality Toolbox, Real Time Toolbox, Real-Time Windows Target Měřicí karty Modely pro výuku teorie řízení Paralelní pracovní stanice HeavyHorse Multiprocesorové stanice pro High-Performance Computing
 Comsol AB. Vývoj vlastního software & hardware. Virtual Reality Toolbox, Real Time Toolbox, Real-Time Windows Target. Měřicí karty. Modely pro výuku teorie řízení. Paralelní pracovní stanice HeavyHorse. Multiprocesorové stanice pro High-Performance Computing.")
3
O společnosti The MathWorks
Společnost The MathWorks založena v roce 1984 Vývoj programu MATLAB Od numerických výpočtů po komplexní výpočetní a vývojové prostředí 1985 1990 1995 2000 2005 Rapid prototyping a HIL Návrhy DSP Stavové diagramy Fyzikální modelování Systémy diskrétních událostí Kontrola integrity modelů Testování a měření Verifikace kódu Vestavěné programové vybavení VHDL a Verilog MATLAB Simulink Návrhy řídicích systémů Zpracování signálu Zpracování obrazu Finanční modelování a analýzy Výpočetní biologie Tvorba aplikací Distribuované a paralelní výpočty Studentská verze Optimalizace Statistika Technické výpočty Datové analýzy a vývoj algoritmů Modelování systémů a simulace Automatické generování kódu Testování, Verifikace, Validace Komunikace s databázemi a instrumenty Software pro signálové procesory Komunikační systémy Zpracování videa The MathWorks was founded in As shown on this timeline, MATLAB, our first core product, was introduced in 1985, providing a technical computing environment with numeric computation, visualization, and a high-level programming language. Our second core product, Simulink, was introduced in 1990 to provide a block-diagram environment for modeling and simulating dynamic systems. <click to build> These products form the platforms on which the company has delivered a broad, integrated set of capabilities. On top of MATLAB, we have delivered: broadly applicable capabilities for signal processing, control design, optimization, image processing, and other applications, through packages called “toolboxes” More specialized toolboxes, for example to analyze and model financial data Tools that connect MATLAB to data acquisition systems and databases, for test & measurement and analysis applications, On top of Simulink, The MathWorks has added a broad set of capabilities for model-based design, including: automatic code generation, for both prototyping and, more recently, production real-time applications modeling of signal processing and communications systems modeling state-machine and logic-based systems modeling physical-domain systems such as mechanical and electrical power systems and turnkey hardware/software systems for real-time prototyping and testing

4
O společnosti The MathWorks
Obrat v roce 2007: asi 450 mil. USD Soukromě vlastněna Více než 1,800 zaměstnanců po celém světě Více než 1,000,000 uživatelů ve 175 zemích 1985 1990 1995 2000 2005

5
Struktura systému MATLAB
Aplikace v reálném čase Toolboxy (knihovny funkcí) Blocksety (knihovny bloků) Tvorba samostatných aplikací Simulink Simulace a modelování dynamických systémů MATLAB Výpočty, programování, vizualizace...
 Blocksety. (knihovny bloků) Tvorba. samostatných aplikací. Simulink. Simulace a modelování dynamických systémů. MATLAB. Výpočty, programování, vizualizace...")
6
Přehled produktů firmy MathWorks
Simulink Product Family Application-Specific Products MATLAB Product Family

7
Aplikační oblasti systému MATLAB
Aplikovaná matematika – technické výpočty vývoj, výzkum automobilový průmysl elektrotechnika výrobní zařízení telekomunikace Nadstavby vhodné pro analýzu dat tvorba matematických algoritmů vývoj algoritmů modelování, vizualizace distribuované a paralelní výpočty

8
Aplikační oblasti systému MATLAB
Automatické řízení a regulace – SW letectví automobilový průmysl průmyslová výroba a výrobní zařízení Nadstavby vhodné pro: modelování a simulace soustav testování algoritmů v systémech řízení embedded software automatické generování kódu

9
Aplikační oblasti systému MATLAB
Další oblasti využití Zpracování obrazu Zpracování signálu a komunikace Modelování fyzikálních soustav Měření a testování

10
Tok informací a dat v MATLABu
vstupy řešení výstupy

11
Co je MATLAB Integrované prostředí pro vědeckotechnické výpočty
Grafické a výpočetní nástroje Intuitivní uživatelské rozhraní MATLAB Desktop Rychlé výpočetní jádro Programovací jazyk 4. Generace více než funkcí objektově orientované programování Grafická uživatelská rozhraní (GUI) Rozsáhlá HTML nápověda prohlížeč funkcí Systém MATLAB je: modulární – toolboxy otevřený – uživatel může zobrazit i upravovat funkce
 Rozsáhlá HTML nápověda. prohlížeč funkcí. Systém MATLAB je: modulární – toolboxy. otevřený – uživatel může zobrazit i upravovat funkce.")
12
Parallel Computing Toolbox
Návrh, tvorba a zpracování paralelních výpočtů a algoritmů Struktura klient sekce MATLABu pro zadání úloh a spouštění celého procesu lokální plánovač (scheduler) rozděluje úlohy do „workerů“, komunikuje s nimi a sbírá výsledky worker jednotka pro výpočet jednotlivých úloh PCT umožňuje spustit až 8 lokálních „workerů“ v rámci jednoho PC
 rozděluje úlohy do „workerů , komunikuje s nimi a sbírá výsledky. worker. jednotka pro výpočet jednotlivých úloh. PCT umožňuje spustit až 8 lokálních „workerů v rámci jednoho PC.")
13
Parallel Computing Toolbox
Interaktivní paralelní mód umožňuje pracovat s paralelními výpočty interaktivně Jazyk pro paralelní výpočty příkazy pro paralelní programování parfor (paralelní cyklus) spmd (simple program multiple data) distribuovaná data codistributed (zpřístupňuje distrib. data pro workery) codistributor (vytváří objekty pro sdílená data) S Parallel Computing Toolboxem lze programovat paralelní algoritmy provádět výpočet paralelních algoritmů na multiprocesorové stanici testovat nastavení paralelního algoritmu před spuštěním na výpočetním clusteru
 spmd (simple program multiple data) distribuovaná data. codistributed (zpřístupňuje distrib. data pro workery) codistributor (vytváří objekty pro sdílená data) S Parallel Computing Toolboxem lze. programovat paralelní algoritmy. provádět výpočet paralelních algoritmů na multiprocesorové stanici. testovat nastavení paralelního algoritmu před spuštěním na výpočetním clusteru.")
14
MATLAB Distributed Computing Server
Rozšiřuje Parallel Computing Toolbox Je možné zpracovávat rozsáhlé výpočetní úlohy v rámci výpočetního clusteru konfigurace pro 8, 16, 32, 64, 96 a 128 workerů Lze využít vlastní nebo externí plánovač (Scheduler, Job Manager)
")
15
MATLAB Compiler Vytváří stand-alone aplikace a sdílené knihovny z programů v MATLABu Lze použít většinu výpočetních a grafických funkcí MATLABu včetně vlastního GUI Aplikaci je možné distribuovat ke spuštění aplikace není nutná instalace MATLABu uživatel bez MATLABu musí mít nainstalován MATLAB Compiler Runtime (MCR) k využívání aplikace není potřeba licence MATLABu – pokrývá licence MATLAB Compileru v rámci komerční licence lze aplikaci zcela libovolně šířit v rámci školní licence lze aplikaci šířit pouze bezplatně a musí být zajištěno její nekomerční (školní) využití
 k využívání aplikace není potřeba licence MATLABu – pokrývá licence MATLAB Compileru. v rámci komerční licence lze aplikaci zcela libovolně šířit. v rámci školní licence lze aplikaci šířit pouze bezplatně a musí být zajištěno její nekomerční (školní) využití.")
16
Co je Simulink Nadstavba MATLABu
Modelování, simulace a analýza dynamických systémů Prostředí blokových schémat předdefinované knihovny bloků systém práce „drag and drop“ tvorba vlastních funkčních bloků Prvky pro tvorbu algebraických a diferenciálních rovnic Otevřené rozhraní pro tvorbu aplikací začlenění kódu z programů MATLAB, C, Fortran Platforma pro Model Based Design následně může být automaticky generován kód pro cílovou platformu

17
Stateflow Modelování událostmi řízených systémů Stateflow Coder
Teorie konečných automatů Stavový popis a vývojové diagramy Začlenění událostmi řízené logiky Intuitivní grafické uživatelské rozhraní Plná integrace do modelů Simulinku Stateflow Coder Automatické generování kódu v jazyce C

18
Simulink 3D Animation Zahrnutí virtuální reality do prostředí MATLABu a Simulinku zobrazení „živé“ virtuální scény během simulace možnost vykreslení virtuální scény v okně Figure společně s grafy či ovládacími prvky Modely jsou ve VRML určení parametrů které se zadávají z MATLABu či Simulinku Součástí VR Toolboxu je VRML editor Model ve VRML lze exportovat z CAD systémů

19
Vehicle Network Toolbox
Komunikace s automobilovou komunikační sítí prostřednictvím protokolu CAN Umožňuje přijímat a odesílat pakety komunikační sběrnice CAN z MATLABu ze Simulinku CAN zprávy lze kódovat dekódovat filtrovat Umožnuje vizualizaci toku informací ve sběrníci

20
Fyzikální modelování MATLAB, Simulink SimPowerSystems Simscape SimMechanics SimDriveline SimHydraulics SimElectronics Modelování soustav skládáním bloků, které reprezentují prvky reálného světa Propojení bloků signály s obousměrnou interakcí reprezentujícími tok energie Propojení se Simulinkem přes bloky senzorů a akčních prvků Simscape modelování základních mechanických, elektrických a hydraulických soustav SimHydraulics modelování hydraulických soustav SimMechanics modelování trojrozměrných mechanických soustav SimDriveline modelování převodových soustav automobilů SimElectronics modelování elektronických obvodů SimPowerSystems modelování energetických soustav, pohonů a výkonové elektroniky

21
- Tradiční - Model Based Design
Vývojový cyklus - Tradiční - Model Based Design Požadavky a specifikace Textová forma Nedovoluje pružné ladění a aktualizace Modely chování systému Modely prostředí Spustitelný model Jednoznačné Pouze “jedna pravda” Požadavky a specifikace Modely fyzických komponent Modely prostředí Algoritmy Simulace Snižuje potřebu fyzických prototypů Umožňuje systematickou “what–if” analýzu Návrh Návrh Fyzické prototypy Drahé, nekompletní Časově náročné Zpřesňování modelu Algoritmy C, C++ MCU DSP FPGA ASIC VHDL, Verilog Implementace Automatické generování kódu Redukce času a úsilí Minimalizace chyb při programování Implementace „Ruční“ programování Náchylné na chyby Neefektivní Testy a Verifikace Hardware-in-the-Loop Processor-in-the-Loop Testy a Verifikace Tradiční testování Chyby odhaleny pozdě vzhledem ke struktuře vývojového procesu Průběžná verifikace

22
Nástroje pro verifikaci a testování
Verifikace a validace modelů v Simulinku Simulink Verification and Validation sledování požadavků (RMI) MSWord, MSExcel DOORS analýza pokrytí modelu testy testování dodržování modelovacích standardů DO-178B, IEC 61508, MAAB Simulink Design Verifier automatické generování testů prověřování vlastností modelů v Simulinku Detekce možného výskytu run-time chyb zdrojového kódu analytickými metodami PolySpace pro jazyky C/C++ a Ada pro generovaný i ručně psaný kód
 MSWord, MSExcel. DOORS. analýza pokrytí modelu testy. testování dodržování modelovacích standardů. DO-178B, IEC 61508, MAAB. Simulink Design Verifier. automatické generování testů. prověřování vlastností modelů v Simulinku. Detekce možného výskytu run-time chyb zdrojového kódu analytickými metodami. PolySpace. pro jazyky C/C++ a Ada. pro generovaný i ručně psaný kód.")
23
COMSOL Multiphysics Řešení parciálních diferenciálních rovnic (PDE)
metodou konečných prvků řešení ve 2D a 3D Rozsáhlý modulární systém AC/DC Module RF Module Heat Transfer Module Acoustics Module Structural Mechanics Module MEMS Module Chemical Engineering Module Earth Science Module COMSOL Reaction Engineering Lab® Optimization Lab

24
Charakteristika programu
Řešení fyzikálních úloh popsatelných PDE, převod úlohy na FEM analýzu Předdefinované aplikace (přenos tepla, dyn. tekutin, elektromagnetismus, atd.) Jednoduché a intuitivní ovládání, uživatelsky příjemné grafické rozhraní Otevřený systém, definice vlastních PDE Kombinace několika aplikací do jedné úlohy – multifyzikální aplikace Propojení s MATLABem a jeho využití jako programovacího prostředí, kombinace funkcí MATLABu a COMSOL Multiphysics Komunikace s externími CAD systémy 24 24
 Jednoduché a intuitivní ovládání, uživatelsky příjemné grafické rozhraní. Otevřený systém, definice vlastních PDE. Kombinace několika aplikací do jedné úlohy – multifyzikální aplikace. Propojení s MATLABem a jeho využití jako programovacího prostředí, kombinace funkcí MATLABu a COMSOL Multiphysics. Komunikace s externími CAD systémy")
25
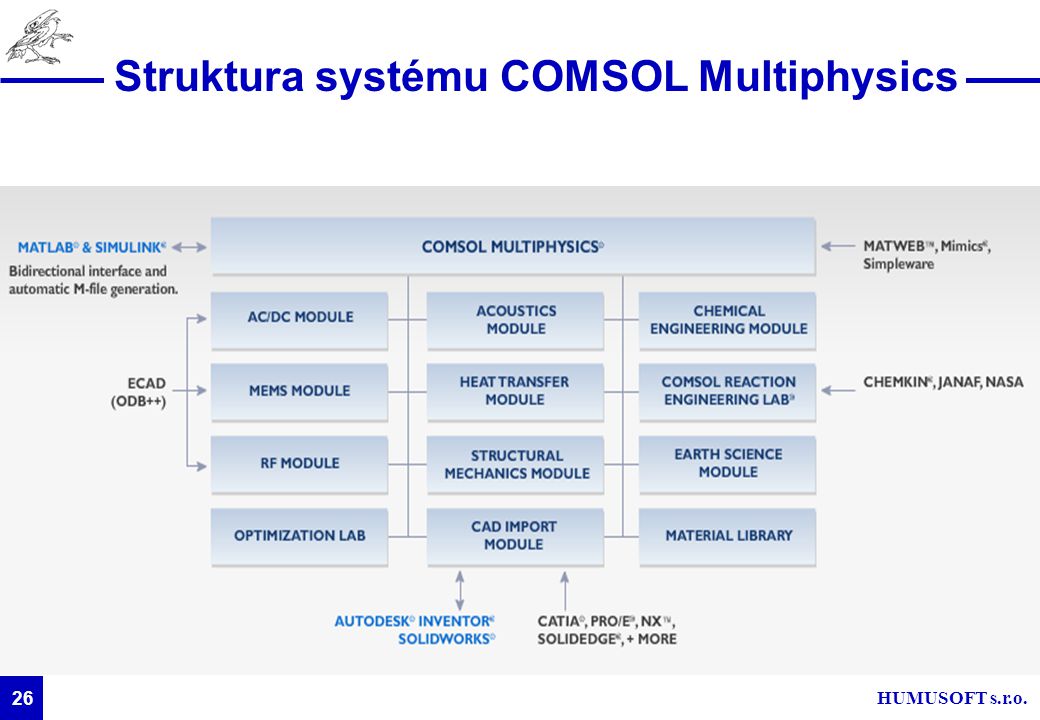
Struktura systému COMSOL Multiphysics
MATLAB Material Library CATIA V4, V5 Pro/E Autodesk Inventor VDA-FS SolidWorks Pro moduly AC/DC, RF a MEMS: GDS, ODB a NETEX-G CAD Import Module Optimization Lab Chemical Engineering Module Structural Mechanics Module RF Module AC/DC Module Acoustics Module MEMS Module Earth Science Heat Transfer Module Reaction Engineering Lab 25 25

26
Struktura systému COMSOL Multiphysics
26 26
27
Co je to Multifyzika ? Provázanost jednotlivých aplikačních režimů Lze řešit postupně nebo současně, podle typu úlohy a závislostí jednotlivých proměnných 27 27

28
Pracovní postup volba jednoho nebo více aplikačních režimů (PDE), multifyzika vytvoření geometrického modelu zadání fyzikálních veličin (subdomény, okrajové podmínky) generování FEM sítě řešní úlohy postprocesor (následné zpracování) komunikace s MATLABem 28 28
 generování FEM sítě. řešní úlohy. postprocesor (následné zpracování) komunikace s MATLABem")
29
Příklady Interakce tekutiny s konstrukcí (FSI) Výsledky simulace
proudění tekutiny (vody) kanálem s ohebnou překážkou materiál překážky ρ = 7850 kg/m3 a E = 8 MPa rozměry kanálu a překážky jsou v μm maximální vstupní rychlost vody je 1,5 m/s ve tvaru paraboloidu stacionární řešení úlohy Výsledky simulace deformace překážky rychlostní pole při proudění kanálem Definice modelu v COMSOLMultiphysics předdefinovaná multifyzikální aplikace Solid, Stress-Strain (u, v, w, p) Moving Mesh (ALE) (x, y, z) Incompressible Navier-Stokes (u2, v2, w2, p2) 29 29
 kanálem s ohebnou překážkou. materiál překážky ρ = 7850 kg/m3 a E = 8 MPa. rozměry kanálu a překážky jsou v μm. maximální vstupní rychlost vody je 1,5 m/s ve tvaru paraboloidu. stacionární řešení úlohy. Výsledky simulace. deformace překážky. rychlostní pole při proudění kanálem. Definice modelu v COMSOLMultiphysics. předdefinovaná multifyzikální aplikace. Solid, Stress-Strain (u, v, w, p) Moving Mesh (ALE) (x, y, z) Incompressible Navier-Stokes (u2, v2, w2, p2)")
30
Příklady Zatížení háčku na úložné skříňce automobilu
Nelineární analýza (díky interakci mezi háčkem a zarážkou, elasto-plastická oblast pro háček, nelinearity v geometrii díky velkým deformacím) Znalost síly pro posuv háčku: F = 2*sqrt(Fx^2+Fy^2+Fz^2) Posuv ve směru osy x: -Displ_max*((para<=1)*para+(para>1)*(2-para)) Parametrický řešič v rozsahu parametru: 0 0.2:0.1:2 Manual Scaling počítaných proměnných a parametrů (velké rozdíly v hodnotách) 30 30
 Znalost síly pro posuv háčku: F = 2*sqrt(Fx^2+Fy^2+Fz^2) Posuv ve směru osy x: -Displ_max*((para<=1)*para+(para>1)*(2-para)) Parametrický řešič v rozsahu parametru: 0 0.2:0.1:2. Manual Scaling počítaných proměnných a parametrů (velké rozdíly v hodnotách)")
31
Teplota inertního plynu Ag
Příklady Žárovka model žárovky (60W) naplněné inertním plynem wolframové vlákno kruhového průřezu při teplotě 2000K (1727°C) vyzařuje světlo Teplota inertního plynu Ag B A Zahřívání žárovky po zapnutí lze analyzovat zahřívání žárovky ve dvou úsecích krátkodobý úsek v intervalu 2, 6 a 10 sec. při zahřívání se mění teplota a tlak plynu, změny vyvolávají proudění plynu rychlost proudění plynu je kolem 0,24m/s dlouhodobý úsek je interval 5 minut 2 sec 6 sec 10 sec Rychlost proudění Ag T = 580K 2 sec 6 sec 10 sec Nárůst teploty za 300s v bodě A Vyzářené teplo v t = 300s na B 31 31
 naplněné inertním plynem. wolframové vlákno kruhového průřezu. při teplotě 2000K (1727°C) vyzařuje světlo. Teplota inertního plynu Ag. B. A. Zahřívání žárovky. po zapnutí lze analyzovat zahřívání žárovky ve dvou úsecích. krátkodobý úsek v intervalu 2, 6 a 10 sec. při zahřívání se mění teplota a tlak plynu, změny vyvolávají proudění plynu. rychlost proudění plynu je kolem 0,24m/s. dlouhodobý úsek je interval 5 minut. 2 sec. 6 sec. 10 sec. Rychlost proudění Ag. T = 580K. 2 sec. 6 sec. 10 sec. Nárůst teploty za 300s v bodě A. Vyzářené teplo v t = 300s na B")
32
Příklady Žárovka – pokračování
2D symetrický model v COMSOL Multiphysics aplikační režim Weakly compressible Navier-Stokes (simulace proudění s proměnnou hustotou) aplikační režim General Heat Transfer zadání vlastností materiálu (oblasti) kovové oblasti: E, ρ materiá ve viskoelastických oblastech: K, ρ, Gi, ti Zdroj tepla ve wolframovém vlákně odpovídá 60 W zadání okrajových podmínek: přestup tepla na vnitřních hranicích modelu je definován jako sálání z povrchu na povrch vnější hranice je nastavena jako sálání z povrchu do okolí hranice v místě patice žárovky je definována jako izolant 32 32
 aplikační režim General Heat Transfer. zadání vlastností materiálu (oblasti) kovové oblasti: E, ρ. materiá ve viskoelastických oblastech: K, ρ, Gi, ti. Zdroj tepla ve wolframovém vlákně odpovídá 60 W. zadání okrajových podmínek: přestup tepla na vnitřních hranicích modelu je definován jako sálání z povrchu na povrch. vnější hranice je nastavena jako sálání z povrchu do okolí. hranice v místě patice žárovky je definována jako izolant")
33
COMSOL Multiphysics Požadavky na HW Unix
Windows 2000, Windows XP, Windows XP Professional x64 Edition, Windows Vista (32 a 64 bit), Windows 2003 Server x64 Edition with Service Pack 2, Windows 2003 Compute Cluster Server, Windows HPC Server 2008 Pentium III nebo novější (AMD Opteron, AMD Athlon 64, Pentium 4 s EM64T, nebo Xeon s EM64T) OpenGL 1.1 Microsoft nebo akcelerátor podporující OpenGL 1.1, nebo Direct X verze 8.0 nebo pozdější. Grafická karta min. 32 MB paměti. Pro práci s MATLABem verze 7.0, 7.0.1, 7.0.4, 7.1, 2006a/b, 2007a/b minimální doporučená RAM 1 GB Unix Solaris 8,9,10 (UltraSPARC II nebo pozdější) Linux (AMD Opteron, AMD Athlon 64, EM64T, Itanium 2) 32-bit: Debian 3.0, 3.1, RedHat Enterprise 4/5, Fedora Core 8, SUSE 10.3 64-bit: SUSE 9.0, , RedHat Enterprise 4/5 (AMD64/Intel EM64T), Fedora Core 8 MAC, PowerPC G4 nebo PowerPC G5, Intel procesor 33 33
, Windows 2003 Server x64 Edition with Service Pack 2, Windows 2003 Compute Cluster Server, Windows HPC Server Pentium III nebo novější (AMD Opteron, AMD Athlon 64, Pentium 4 s EM64T, nebo Xeon s EM64T) OpenGL 1.1 Microsoft nebo akcelerátor podporující OpenGL 1.1, nebo Direct X verze 8.0 nebo pozdější. Grafická karta min. 32 MB paměti. Pro práci s MATLABem verze 7.0, 7.0.1, 7.0.4, 7.1, 2006a/b, 2007a/b. minimální doporučená RAM 1 GB. Unix. Solaris 8,9,10 (UltraSPARC II nebo pozdější) Linux (AMD Opteron, AMD Athlon 64, EM64T, Itanium 2) 32-bit: Debian 3.0, 3.1, RedHat Enterprise 4/5, Fedora Core 8, SUSE bit: SUSE 9.0, , RedHat Enterprise 4/5 (AMD64/Intel EM64T), Fedora Core 8. MAC, PowerPC G4 nebo PowerPC G5, Intel procesor")
34
Spolupráce s MATLABem fem struktura M-soubor
Propojení CM a MATLABu fem struktura M-soubor komunikace přes Export, Import % COMSOL Multiphysics Model M-file % Generated by COMSOL 3.5a (COMSOL , $Date: 2008/11/18 16:53:37 $) flclear fem % COMSOL version clear vrsn vrsn.name = 'COMSOL 3.5'; vrsn.ext = 'a'; vrsn.major = 0; vrsn.build = 585; vrsn.rcs = '$Name: v35p $'; vrsn.date = '$Date: 2008/11/18 16:53:37 $'; fem.version = vrsn; % Constants fem.const = {'K','1e-11[m^3/(A*s)]'}; % Geometry g1=rect2(2.8,0.4,'base','corner','pos',[-1.4,0]); g2=circ2('0.3','base','center','pos',{'0','0.6'},'rot','0'); g3=geomcomp({g1,g2},'ns',{'g1','g2'},'sf','g1-g2','edge','none'); g3=scale(g3,1e-3,1e-3,0,0); % Analyzed geometry clear s s.objs={g3}; s.name={'CO1'}; s.tags={'g3'}; fem = version: [1x1 struct] appl: {[1x1 struct]} geom: [1x1 solid2] mesh: [1x1 femmesh] frame: {'ref'} shape: {'shlag(2,'c')'} border: 1 outform: 'general' form: 'general' units: [1x1 struct] equ: [1x1 struct] bnd: [1x1 struct] pnt: [1x1 struct] expr: {'c1' 'c0*exp(a*(-(x/4e-4[m])^2))'} descr: [1x1 struct] elemcpl: {[1x1 struct]} draw: [1x1 struct] const: {'c0' '3[mol/m^3]' 'a' '1000' 'k_f' '5[m/s]' 'D1' '1e-5[m^2/s]'} ode: [1x1 struct] xmesh: [1x1 com.femlab.xmesh.Xmesh] sol: [1x1 femsol] 34 34 34
 flclear fem. % COMSOL version. clear vrsn. vrsn.name = COMSOL 3.5 ; vrsn.ext = a ; vrsn.major = 0; vrsn.build = 585; vrsn.rcs = $Name: v35p $ ; vrsn.date = $Date: 2008/11/18 16:53:37 $ ; fem.version = vrsn; % Constants. fem.const = { K , 1e-11[m^3/(A*s)] }; % Geometry. g1=rect2(2.8,0.4, base , corner , pos ,[-1.4,0]); g2=circ2( 0.3 , base , center , pos ,{ 0 , 0.6 }, rot , 0 ); g3=geomcomp({g1,g2}, ns ,{ g1 , g2 }, sf , g1-g2 , edge , none ); g3=scale(g3,1e-3,1e-3,0,0); % Analyzed geometry. clear s. s.objs={g3}; s.name={ CO1 }; s.tags={ g3 }; fem = version: [1x1 struct] appl: {[1x1 struct]} geom: [1x1 solid2] mesh: [1x1 femmesh] frame: { ref } shape: { shlag(2, c ) } border: 1. outform: general form: general units: [1x1 struct] equ: [1x1 struct] bnd: [1x1 struct] pnt: [1x1 struct] expr: { c1 c0*exp(a*(-(x/4e-4[m])^2)) } descr: [1x1 struct] elemcpl: {[1x1 struct]} draw: [1x1 struct] const: { c0 3[mol/m^3] a 1000 k_f 5[m/s] D1 1e-5[m^2/s] } ode: [1x1 struct] xmesh: [1x1 com.femlab.xmesh.Xmesh] sol: [1x1 femsol]")
35
Spolupráce s MATLABem COMSOL Multiphysics a Simulink
fem struktura jako přenosová funkce 35 35

36
Rastrové soubory v Comsol Multiphysics
MRI – magnetická rezonance load mri i=[ ]; figure for k=1:6 subplot(2,3,k) image(D(:,:,1,i(k))) title(sprintf('Image %d',k)); axis off end colormap(map) % th=[ ]; kf=[ ]; clear c [c{k},r]= flim2curve(D(:,:,1,i(k)),{th(k),[]},'KeepFrac', kf(k)); 36 36 36
 image(D(:,:,1,i(k))) title(sprintf( Image %d ,k)); axis off. end. colormap(map) % th=[ ]; kf=[ ]; clear c. [c{k},r]= flim2curve(D(:,:,1,i(k)),{th(k),[]}, KeepFrac , kf(k));")
37
Rastrové soubory v Comsol Multiphysics
for k=1:6 c{k}=solid2(c{k}); end % s1=c{1} e1={ }; dvr={repmat(12.5,1,5),repmat(0,2,6),repmat(0,1,6)}; lg=loft(c,'loftedge',e1,'loftsecpos',dvr,'loftweights',repmat(0.1,2,5)); figure geomplot(lg) 37 37
; end. % s1=c{1} e1={ }; dvr={repmat(12.5,1,5),repmat(0,2,6),repmat(0,1,6)}; lg=loft(c, loftedge ,e1, loftsecpos ,dvr, loftweights ,repmat(0.1,2,5)); figure. geomplot(lg)")
38
Rastrové soubory v Comsol Multiphysics
Využití funkce flim2curve k detekování kontur v rastrovém obrázku – prostředí MATLABu clear all p=(peaks+7)*5;figure image(p) g = flim2curve(p,{[],[5:5:75]}); c=geomcsg({rect2(5,45,0,50)},{g}); s=solid2(c) vizualizace pomocí funkce geomplot figure geomplot(s,'pointmode','off','sublabels','on'); 38 38
*5;figure. image(p) g = flim2curve(p,{[],[5:5:75]}); c=geomcsg({rect2(5,45,0,50)},{g}); s=solid2(c) vizualizace pomocí funkce geomplot. figure. geomplot(s, pointmode , off , sublabels , on );")
39
Humusoft HeavyHorse Procesory AMD Opteron 8-64 GB RAM
dva nebo čtyři dvoujádrové dva nebo čtyři čtyřjádrové frekvence CPU 2.3 až 3 GHz 8-64 GB RAM Grafická karta ATI Radeon HD 4870 Pevný disk 500 GB Optická mechanika DVD±RW Operační systém podle přání OpenSuSE Linux 64-bit Microsoft Windows XP 64-bit Microsoft Windows Vista 64-bit Možnost předinstalace aplikací MATLAB Parallel Computing Toolbox 39 39

40
HUMUSOFT MF 624 a AD 622 Aplikace společné MF 624 lze navíc využít pro
Měření stejnosměrných napětí Připojení převodníků a snímačů Měření vibrací a přechodových jevů Řízení a monitorování procesů Snímání a analýza průběhu Vícekanálový sběr dat Simulace v reálném čase MF 624 lze navíc využít pro Měření polohy Servosystémy Pulzně-šířková modulace Měření frekvence Měření času Generování pulzů/frekvence Čítání pulsů

41
HUMUSOFT MF 624 a AD 622 AD 622 MF 624 Společné vlastnosti
levná měřicí karta pro PC Osm single-ended 14-bitových analogových vstupů Osm 14-bitových analogových výstupů 8 digitálních vstupů, 8 digitálních výstupů MF 624 multifunkční vstupně-výstupní karta 4 vstupy inkrementálních snímačů (diferenciální) 4 čítače/časovače Společné vlastnosti Nízká spotřeba Krátká doba A/D převodu Ovladače pro Real Time Toolbox, Real-Time Windows Target Windows, 32 i 64-bitové aplikace
 4 čítače/časovače. Společné vlastnosti. Nízká spotřeba. Krátká doba A/D převodu. Ovladače pro. Real Time Toolbox, Real-Time Windows Target. Windows, 32 i 64-bitové aplikace.")
42
Zdroje informací Webové semináře (webinars) Školení Zkušební verze
on-line semináře zdarma probíhající na internetu v reálném čase v daný den a hodinu v angličtině (COMSOL) přehled připravovaných a archiv uskutečněných webových seminářů Školení Firma HUMUSOFT provádí jednodenní školení na COMSOL Multiphysics zhruba 1x za dva měsíce, termíny jsou vyhlašovány 3 týdny předem Zkušební verze Plnohodnotná verze COMSOL Multiphysics Časově omezena maximálně na 30 dní V případě zájmu nás kontaktujte 42 42
 přehled připravovaných a archiv uskutečněných webových seminářů. Školení. Firma HUMUSOFT provádí jednodenní školení na COMSOL Multiphysics. zhruba 1x za dva měsíce, termíny jsou vyhlašovány 3 týdny předem. Zkušební verze. Plnohodnotná verze COMSOL Multiphysics. Časově omezena maximálně na 30 dní. V případě zájmu nás kontaktujte")
43
Zdroje informací Internetové stránky MATLAB central www.humusoft.cz
domovská stránka firmy Humusoft s.r.o. domovská stránka firmy The MathWorks, Inc. MATLAB central prostor pro vzájemnou komunikaci mezi uživateli a příznivci systému MATLAB/Simulink (otevřená platforma pro prezentaci vlastních aplikací, výměnu souborů, názorů i zkušeností)
")
44
Zdroje informací Webové semináře (webinars) Školení
on-line semináře zdarma probíhající na internetu v reálném čase v daný den a hodinu videa webových seminářů, které již proběhly, jsou ke stažení v angličtině (The MathWorks), češtině, slovenštině přehled připravovaných a archiv uskutečněných webových seminářů Školení Firma HUMUSOFT provádí školení na MATLAB, Simulink, Stateflow, Real Time Workshop, fyzikální modelování zhruba 1x za dva měsíce, termíny jsou vyhlašovány 3 týdny předem
, češtině, slovenštině. přehled připravovaných a archiv uskutečněných webových seminářů. Školení. Firma HUMUSOFT provádí školení na MATLAB, Simulink, Stateflow, Real Time Workshop, fyzikální modelování. zhruba 1x za dva měsíce, termíny jsou vyhlašovány 3 týdny předem.")
45
Děkuji za pozornost

Podobné prezentace



, Martin.>")




>")







 Elektronky, relé = drahé, pomalé Druhá generace (1951 - 1965) Tranzistory = zmenšování.>")


