Stáhnout prezentaci
Prezentace se nahrává, počkejte prosím

1
Metody zpracování fyzikálních měření - 4 EVF 112 ZS 2009/2010 L.Přech

2
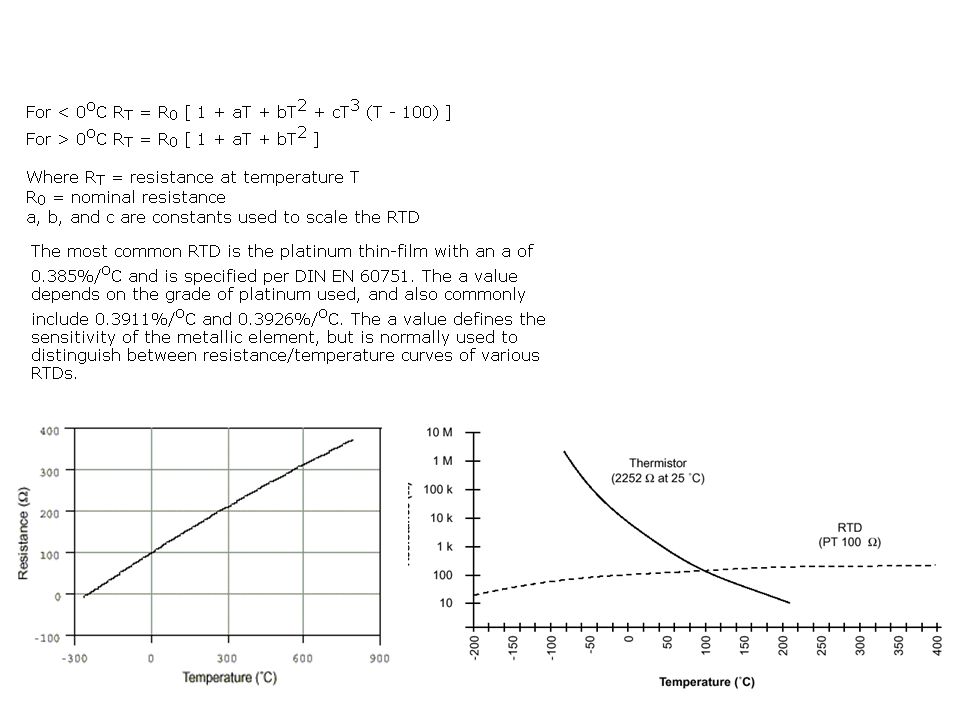
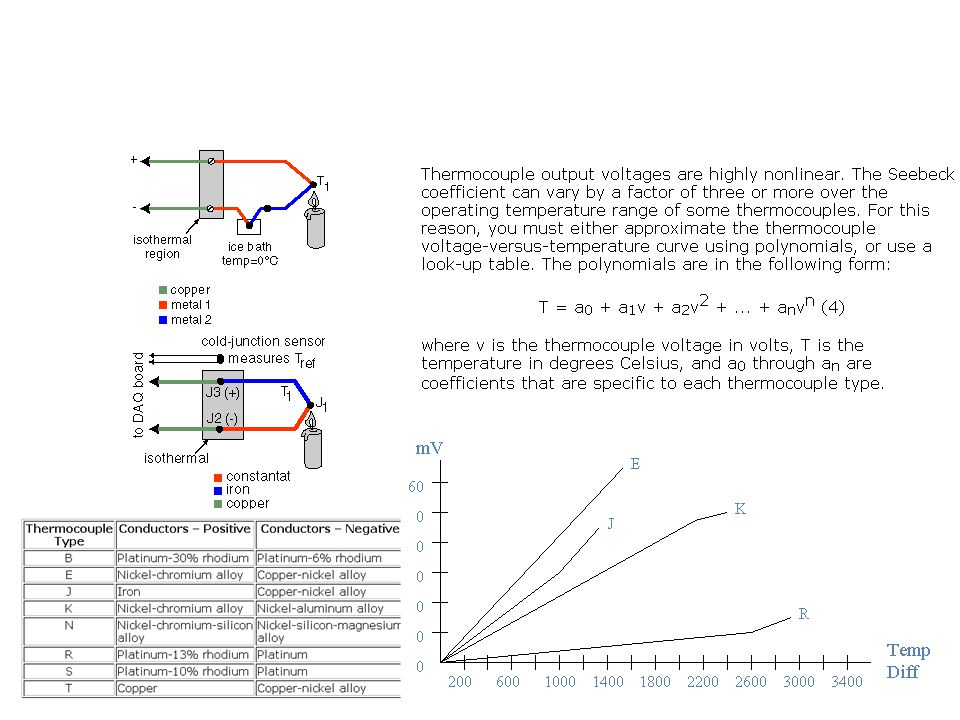
Kalibrace Úloha kalibrace Kalibrační křivka a její specifikace Vnější a vnitřní kalibrace

5
Základní zpracování časových řad II - osnova On-line a off-line zpracování dat Frekvenční analýza D/A a A/D převodu jako lineárního systému, konvoluce Čištění dat, vzorkování a průměrování Zvýšení rozlišení hodnot Zvýšení/snížení vzorkovací frekvence, filtrace Další operace v časové doméně (spojování a synchronizace dat)
")
6
On-line a off-line zpracování dat V časech T i ( T i > T k pokud i>k) máme naměřeny vzorky X i Z nich určujeme v časech T j hodnoty Y j = f ( j, T i, X i ) Funkce f představuje obecně tzv. digitální filtr Při off-line zpracování nejsou na indexy i vůči j kladena žádná omezení (nejprve vše naměříme, poté zpracujeme) – pokud funkce f pracuje nejen s hodnotami i j ale též i > j – filtr je fyzikálně nerealizovatelný Při on-line zpracování jsou v čase T j k dispozici jen minulé hodnoty X i, i j (hodnoty X i, i > j ještě nebyly naměřeny) –funkce f pracuje jen s hodnotami i j – fyzikálně realizovatelný filtr, s vhodnými výpočetními prostředky lze provádět v reálném čase –hodnoty Y i získané fyzikálně realizovatelnými filtry můžeme bezprostředně vracet do experimentu – zpětná vazba, digitální regulace
 – pokud funkce f pracuje nejen s hodnotami i j ale též i > j – filtr je fyzikálně nerealizovatelný Při on-line zpracování jsou v čase T j k dispozici jen minulé hodnoty X i, i j (hodnoty X i, i > j ještě nebyly naměřeny) –funkce f pracuje jen s hodnotami i j – fyzikálně realizovatelný filtr, s vhodnými výpočetními prostředky lze provádět v reálném čase –hodnoty Y i získané fyzikálně realizovatelnými filtry můžeme bezprostředně vracet do experimentu – zpětná vazba, digitální regulace.")
7
Lineární systém Daný vstupní signál x(t) způsobí na výstupu odezvu y(t) Platí princip superpozice x 1 (t) + x 2 (t) y 1 (t) + y 2 (t) Impulsní odezva h(t) – odezva na vstupní signál ve tvaru (0) – Diracovo delta v čase 0 – dostatečně popisuje lineární systém: –Výstup LS je konvoluce vstupu a impulsní odezvy –Kauzální systém: h(t) = 0 pro t<0 –Stabilní systém: h(t) 0 pro t Odezva na jednotkový skok (Heavisideova funkce) X(t)Y(t)
 způsobí na výstupu odezvu y(t) Platí princip superpozice x 1 (t) + x 2 (t) y 1 (t) + y 2 (t) Impulsní odezva h(t) – odezva na vstupní signál ve tvaru (0) – Diracovo delta v čase 0 – dostatečně popisuje lineární systém: –Výstup LS je konvoluce vstupu a impulsní odezvy –Kauzální systém: h(t) = 0 pro t<0 –Stabilní systém: h(t) 0 pro t Odezva na jednotkový skok (Heavisideova funkce) X(t)Y(t)")
8
Frekvenční odezva lin. systému Pro x(t) = cos t + j sin t y(t) = x(t) * h(t) = y(t) zapíšeme jako Dostaneme Frekvenční odezva LS je modul Fourierovy transformace impulzní odezvy, fázová odezva je argument téhož. Platí FT [ x(t) * h(t) ] = FT [x(t)]. FT [h(t)] Y( ) = X( ) H( ) H( )... přenosová funkce LS (je obecně komplexní)
 = cos t + j sin t y(t) = x(t) * h(t) = y(t) zapíšeme jako Dostaneme Frekvenční odezva LS je modul Fourierovy transformace impulzní odezvy, fázová odezva je argument téhož. Platí FT [ x(t) * h(t) ] = FT [x(t)]. FT [h(t)] Y( ) = X( ) H( ) H( )... přenosová funkce LS (je obecně komplexní).")
9
Diskrétní lineární systém, vzorkování A/D převodník sbírá „okamžité“ hodnoty. Definujeme T je vzorkovací perioda. Sérii vzorků zapíšeme Podobně pro diskrétní verzi impulsní odezvy V kauzálních systémech (on-line) h[t] = 0 pro t < 0, stabilita h[t] 0 pro t
 h[t] = 0 pro t < 0, stabilita h[t] 0 pro t .")
10
Diskrétní lineární systémy y(t) = x(t) * h(t) => –V kauzálních stabilních systémech není suma nekonečná y[n] = posunutý ve frekvenci o 2 /T y[n] = nerozlišitelné - aliasing Př.1: Př.2:
![Diskrétní lineární systémy y(t) = x(t) * h(t) => –V kauzálních stabilních systémech není suma nekonečná y[n] = posunutý ve frekvenci o 2 /T y[n] = nerozlišitelné - aliasing Př.1: Př.2:](http://images.slideplayer.cz/8/2425102/slides/slide_10.jpg "Diskrétní lineární systémy y(t) = x(t) * h(t) => –V kauzálních stabilních systémech není suma nekonečná y[n] = posunutý ve frekvenci o 2 /T y[n] = nerozlišitelné - aliasing Př.1: Př.2:")
11
Diskrétní lineární systémy y(t) = x(t) * h(t) => –V kauzálních stabilních systémech není suma nekonečná y[n] = posunutý ve frekvenci o 2 /T y[n] = nerozlišitelné - aliasing Př.1: Př.2:
![Diskrétní lineární systémy y(t) = x(t) * h(t) => –V kauzálních stabilních systémech není suma nekonečná y[n] = posunutý ve frekvenci o 2 /T y[n] = nerozlišitelné - aliasing Př.1: Př.2:](http://images.slideplayer.cz/8/2425102/slides/slide_11.jpg "Diskrétní lineární systémy y(t) = x(t) * h(t) => –V kauzálních stabilních systémech není suma nekonečná y[n] = posunutý ve frekvenci o 2 /T y[n] = nerozlišitelné - aliasing Př.1: Př.2:")
12
Jednoduchý D-A převod „Hold“ - konvoluce řady vzorků s obdélníkovým pulsem jednotkové výšky a délky T aliasing omezení vys. frekvencí

13
D-A převod s interpolací Zdvojíme vzorkovací frekvenci vložením lineárně interpolovaných hodnot Další zlepšení -> více vkládaných vzorků -> over-sampling

14
Úpravy časových řad - úvod čas měření T i interval vzorkování 2 T, vzorkovací frekvence 1/ 2 T délka vzorku 2 mezera v datech vzorkovací faktor S = f N / f max S < 1 (under-sampling) S > 1 (over-sampling)
 S > 1 (over-sampling)")
15
Příprava dat Mezery v datech –Někdy vhodné zaplnit interpolací Šum v datech – podle charakteru aplikujeme –Filtrace frekvenční – nf/vf/pásmové filtry, zhlazení, mediánový filtr

16
Vztahy dvou časových řad Dvě sady dat se stejnými časy měření Sady s rozdílnými časy měření –společné hodiny, konstantní časový posuv –synchronizace společnými hodinami – racionální poměr vzorkovacích frekvencí –nominálně stejné vzorkovací frekvence, řídící hodiny bez vzájemné synchronizace – neřízený časový posuv, obvykle narůstá –různé vzorkovací frekvence, žádná vzájemná synchronizace

17
Úpravy časových řad – operace 1 Převzorkování řady (resampling) –převod řady vzorků T i, X i na vzorky X´ j v časech t j (perioda vzorkování 2 t) porovnání dvou sad s různými vzorkovacími frekvencemi např. data s vysokým a nízkým časovým rozlišením porovnání dat z různých družic (nesynchronní hodiny) porovnání dat z jedné družice synchronních s jejím otáčením a s jiným řídícím kmitočtem porovnání družicových a pozemních dat
 porovnání dat z jedné družice synchronních s jejím otáčením a s jiným řídícím kmitočtem porovnání družicových a pozemních dat.")
18
Úpravy časových řad – operace 2 Spojování řad (joining) –převzorkování jedné řady, takže upravená řada má totožné časy měření s druhou řadou – umožní další společné zpracování (korelace...) –Data obou řad pokrývají stejné časové období Sloučení řad (merging) –pouhé složení dat do jednoho souboru, časy měření zůstávají rozdílné Zřetězení řad (concatenation) –Spojení dvou a více řad dat stejného typu, výchozí řady pokrývají disjunktní časová období
 –převzorkování jedné řady, takže upravená řada má totožné časy měření s druhou řadou – umožní další společné zpracování (korelace...) –Data obou řad pokrývají stejné časové období Sloučení řad (merging) –pouhé složení dat do jednoho souboru, časy měření zůstávají rozdílné Zřetězení řad (concatenation) –Spojení dvou a více řad dat stejného typu, výchozí řady pokrývají disjunktní časová období")
19
Algoritmy pro spojování řad A „fuzzy“ B lineární interpolace C kubická (spline) interpolace D „boxcar“ průměrování E vážené průměrování X i X´ j T i t j zvýšení časového rozlišení snížení časového rozlišení
 interpolace D „boxcar průměrování E vážené průměrování X i X´ j T i t j zvýšení časového rozlišení snížení časového rozlišení")
20
Algoritmy pro spojování řad Fuzzy spojování –metoda nejbližšího souseda X i -> X´ j –intervaly T i a t j t se musí překrývat, jinak mezery v datech, obvykle |T i – t j | T tol Lineární interpolace X´ j Kubická interpolace –Obdobně jen s pomocí splinů (spojité kubické křivky, spojité první derivace)
")
21
Algoritmy pro spojování řad Boxcar filtr –v okolí t j uvnitř okénka šířky 2 T box 4 t najdeme měření i a do X´ j dosadíme jejich průměrnou hodnotu Vážené průměry –spojení lin. interpolace a boxcar, nalezené body s vhodnými váhami lineárně aproximujeme (metodou nejmenších čtverců) –na rozdíl od boxcar bere v úvahu časové rozmístění ! Snížení vzorkovací frekvence – nebezpečí aliasingu –nutná digitální filtrace před převzorkováním
 –na rozdíl od boxcar bere v úvahu časové rozmístění . Snížení vzorkovací frekvence – nebezpečí aliasingu –nutná digitální filtrace před převzorkováním.")
Podobné prezentace







>")



>")
 – složitější operace se sadou datových souborů – tvorba maker pro automatizaci zpracování.>")






