Stáhnout prezentaci
Prezentace se nahrává, počkejte prosím

1
Základy elektroniky 1 - Úvod do analogového a číslicového zpracování dat L.Přech, KFPP 11-2015

3
Model fyzikálního experimentu Stanovujeme závislost veličiny y na veličině x při daném parametru (např. závislost proudu vzorkem na napětí při určité teplotě) Obvykle opakovaná měření pro diskrétní hodnoty x i j, určování střední hodnoty a odhad chyby x, nastavované nebo implicitně závislé na čase x(t) (t)
 Obvykle opakovaná měření pro diskrétní hodnoty x i j, určování střední hodnoty a odhad chyby x, nastavované nebo implicitně závislé na čase x(t) (t).")
4
Počítač jako automatické registrační zařízení Ruční nastavení x, resp. x(t) (t) Automatický zápis hodnot (t) y(t) Vyhodnocení a zpracování často až po ukončení zápisu Využíváme rychlost registračního systému!
 (t) Automatický zápis hodnot (t) y(t) Vyhodnocení a zpracování často až po ukončení zápisu Využíváme rychlost registračního systému!.")
5
Počítačově řízený experiment Automatické nastavení x, resp. x(t) (t) –volně dle programu – automatické měření –s cílem stabilizovat nebo řídit y nebo - regulace Automatický zápis hodnot (t) y(t) Vyhodnocení a zpracování obvykle během měření
 (t) –volně dle programu – automatické měření –s cílem stabilizovat nebo řídit y nebo - regulace Automatický zápis hodnot (t) y(t) Vyhodnocení a zpracování obvykle během měření.")
6
Základní schéma systému sběru dat a řízení experimentu Počítač Sběr dat, řízení výstupů Úprava signálů Akční členy Čidla Fyzikální veličiny

7
Elektrické povahy –napětí –proud –odpor, vodivost, indukčnost, kapacita –magnetické pole –kmitočet, fáze –perioda, střída –impulzy, události Spojité nebo diskrétní (v hodnotě nebo čase, digitální signály) Neelektrické –teplota –poloha a pohyb, zrychlení, síla –vlhkost, tlak –osvětlení, optické záření –hmotnost –chemické složení –…. Veličina vyjádřena časovým průběhem signálu - elektrické veličiny

8
Převod elektrických veličin na neelektrické a zpět Akční členy –topné elementy –zdroje světla –ventily –motory –elmg. cívky –…. Čidla –termočlánky, termistory –fotodiody –průtokoměry, vakuometry –snímače polohy a pohybu, tenzometry a akcelerometry –Hallovy sondy –vlhkoměry –detektory částic –....

9
Spojitý vs. digitální svět - číslicový počítač – pracuje s diskrétní informací Digitální signály Přímé měření/řízení –digitální vstupy/výstupy (logické signály) –čas – frekvence, perioda, délka pulsu, střída signálu, fáze Analogové signály Přímé, převod A/D a D/A –napětí (proud) Nepřímé – mezipřevod na časové veličiny nebo napětí/proud –často pro ostatní elektrické veličiny: odpor/vodivost, kapacita, indukčnost
 –čas – frekvence, perioda, délka pulsu, střída signálu, fáze Analogové signály Přímé, převod A/D a D/A –napětí (proud) Nepřímé – mezipřevod na časové veličiny nebo napětí/proud –často pro ostatní elektrické veličiny: odpor/vodivost, kapacita, indukčnost.")
10
Analogové zpracování signálu Analogový signál upravujeme přímo analogovými elektronickými obvody Očekávané změny amplitudy a fáze zpravidla závisejí na frekvenci, kmitočtové charakteristiky nastaveny hodnotami pasivních součástek – málo flexibilní

11
Číslicové zpracování signálu Výhody číslicového zpracování Méně komponent, deterministické stabilní chování, širší uplatnění Větší šumová odolnost, menší závislost na napájení, teplotě atd. Jednoduché přeladění filtrů, filtry s menšími tolerancemi, možnost self- testu Možnost implementace adaptivních filtrů ANALOG INANALOG OUT Finite Impulse Response Filter Číslicově- analogový převodník (DAC) Vzorkování (S/H) a analogově- číslicový převodník (ADC) Digitální zpracování (DSP) Rekonstrukční filter Anti-aliasing filter
 Vzorkování (S/H) a analogově- číslicový převodník (ADC) Digitální zpracování (DSP) Rekonstrukční filter Anti-aliasing filter.")
13
Rozdělení převodníků neelektrických veličin Přímý převod energie neelektrické veličiny – vlastní zdroj elektromotorické síly –elektromagnetické, termoelektrické, fotoelektrické, piezoelektrické, Hallův jev, … Pasivní převodníky – potřebují vnější elektrický zdroj –využívají závislost elektrické vlastnosti čidla na měřené veličině – magnetorezistivita, elektrický odpor na teplotě, indučnost na poloze jádra, … Zpětnovazební pasivní převodníky – zpětná vazba udržuje rovnováhu mezi měřenou veličinou a protipůsobícím elektrickým signálem

14
Příklad - termočlánek Přímý převod energie –termoelektrická napětí U o = U 1 (T ref )+ U 2 (T) – U 3 (T ref ) T ref T U1U1 U3U3 U2U2 UoUo Citlivost 7 – 50 V/°C Rozsah voltmetru Zesílení vst. zesilovače Rozlišení v bitech známe

15
Příklad - pasivní převodníky Převodník polohy (úhlu): –Posuv jezdce -> proměnný odpor -> napětí Drátkový termoanemometr: –Rychlost proudění -> míra ochlazování -> teplota -> odpor -> napětí Wheatstonův můstek
: –Posuv jezdce -> proměnný odpor -> napětí Drátkový termoanemometr: –Rychlost proudění -> míra ochlazování -> teplota -> odpor -> napětí Wheatstonův můstek")
16
RTD - odporové teploměry (např. Pt) Malý odpor, typ. 100 Malá citlivost ~0.4 /°C 2-drátové měření – málo vhodné – úbytek napětí na přívodech 4-drátové zapojení – lepší, na měřicích přívodech pro napětí minimální úbytek 3-drátové zapojení – vhodné pro můstky (Wheatstonův )
.")
17
Můstkové zapojení – RTD, tenzometry 3-drátové zapojení RTD ve Wheatstonově můstku – protilehlé větve R G1, R G2 kompenzují odpor přívodů Tenzometry v můstku – poloviční nebo úplný můstek – zvýšení citlivosti měření Použití tenzometrů: –jejich odpor závisí na mechanickém napětí –použití též jako převodníky jiné síly – zrychlení, tlak, vibrace

18
Příklad – čidlo se zpětnou vazbou Drátkový termoanemometr: –zpětná vazba udržuje můstek vyvážený -> stabilizace odporu (teploty) sondy (výstupní napětí) 2 ~ teplo ztrácené na sondě ~ rychlost proudění
 sondy (výstupní napětí) 2 ~ teplo ztrácené na sondě ~ rychlost proudění")
19
Další příklady LVDT (lineární napěťový diferenciální transformátor) Měření lineárního posunu – rozdílná vazba do sekundárního vinutí L a P Čidla s interním převodem na proudovou smyčku 0-20 nebo 4-20 mA ISIS X 4 20
 Měření lineárního posunu – rozdílná vazba do sekundárního vinutí L a P Čidla s interním převodem na proudovou smyčku 0-20 nebo 4-20 mA ISIS X 4 20")
20
Porovnání některých čidel ČidloElektrické vlastnostiPožadavky na úpravu signálu termočlánek Malé výstupní napětí, nízká citlivost, nelineární výstup Referenční teplotní čidlo pro kompenzaci studeného konce, velké zesílení, linearizace odporový teploměr Malý odpor (typ. 100 ), nízká citlivost, nelineární výstup Proudové buzení, 3-, 4-drátové zapojení, linearizace integrované teplotní čidlo Vysokoúrovňový výstup (~V), linearita Zdroj napájení, malé zesílení tenzometr Malý odpor, nízká citlivost, nelineární výstup Napěťové n. proudové buzení, vysoké zesílení, můstkové zapojení, linearizace, kalibrace bočníků čidlo s proudovým výstupem Proudová smyčka (4 – 20 mA typ.)Přesný rezistor termistor Odporové čidlo, vysoký odpor a citlivost, velmi nelineární Napěťové n. prodouvé buzení s referenčním rezistorem, linearizace aktivní akcelerometrVysokoúrovňový výstup (~V), linearita Zdroj napájení, malé zesílení Kapacitní manometrKapacita závislá na tlaku (malé hodnoty) Buzení střídavým proudem, můstkové zapojení nebo oscilátor LVDT Střídavé napětíBuzení střídavým proudem, demodulace, linearizace
, nízká citlivost, nelineární výstup Proudové buzení, 3-, 4-drátové zapojení, linearizace integrované teplotní čidlo Vysokoúrovňový výstup (~V), linearita Zdroj napájení, malé zesílení tenzometr Malý odpor, nízká citlivost, nelineární výstup Napěťové n. proudové buzení, vysoké zesílení, můstkové zapojení, linearizace, kalibrace bočníků čidlo s proudovým výstupem Proudová smyčka (4 – 20 mA typ.)Přesný rezistor termistor Odporové čidlo, vysoký odpor a citlivost, velmi nelineární Napěťové n. prodouvé buzení s referenčním rezistorem, linearizace aktivní akcelerometrVysokoúrovňový výstup (~V), linearita Zdroj napájení, malé zesílení Kapacitní manometrKapacita závislá na tlaku (malé hodnoty) Buzení střídavým proudem, můstkové zapojení nebo oscilátor LVDT Střídavé napětíBuzení střídavým proudem, demodulace, linearizace.")
21
Obecné funkce obvodů pro úpravu signálu Zesílení analogových signálů –Změny vst. signálu vhodně pokrývají rozsah ADC – zvětšení rozlišení, citlivosti, zvýšení poměru S/N Útlum –Úprava velikosti velkých signálů (vysoké napětí...) Filtrace –Snížení šumu v určité části spektra (např. 50, 60 Hz) –Zabránění aliasingu (Nyquistův teorém) Izolace (optická, transformátory) –Přerušení zemních smyček, snížení šumu, zabránění poškození zařízení, oddělení obvodů s nebezpečným napětím Multiplex –Přepínání ADC mezi více kanály, volba způsobu připojení signálu Současné vzorkování více kanálů Buzení snímačů, můstková zapojení, 3- a 4- drátová měření Kompenzace studeného konce termočlánku
 Filtrace –Snížení šumu v určité části spektra (např. 50, 60 Hz) –Zabránění aliasingu (Nyquistův teorém) Izolace (optická, transformátory) –Přerušení zemních smyček, snížení šumu, zabránění poškození zařízení, oddělení obvodů s nebezpečným napětím Multiplex –Přepínání ADC mezi více kanály, volba způsobu připojení signálu Současné vzorkování více kanálů Buzení snímačů, můstková zapojení, 3- a 4- drátová měření Kompenzace studeného konce termočlánku.")
22
Další funkce – synchronní detekce Synchronní detekce je technika zpracování signálu, která: umožňuje separovat i velmi slabý signál v silném šumu - např.: –příjem signálů v radiotechnice –zpracování signálu se silným rušením vyžaduje referenční signál s přesně danou frekvencí a fází Výstupní signál Synchronní detektor - harmonický nebo obdélníkový signál budí fyzikální proces moduluje měřenou veličinu

23
Úvod do synchronní detekce

24
Další funkce Komprese dynamiky signálů –Bell µ-255 Linearizace signálu (častěji sw) Úprava digitálních signálů –Převod úrovní, hystereze vstupů, galvanická izolace(optická nebo transformátorová), výkonové zesílení, buzení relé a stykačů
 Úprava digitálních signálů –Převod úrovní, hystereze vstupů, galvanická izolace(optická nebo transformátorová), výkonové zesílení, buzení relé a stykačů")
26
Očekáváme: věrnost přenosu (výstupní signál má stejný tvar jako vstupní) – poměr harmonických složek signálu by se měl zachovávat, neměl by se měnit jejich fázový posuv => modulová a fázová frekvenční charakteristika konstantní běžné střídavé zesilovače vysoké frekvence - zesílení klesá s rostoucí frekvencí díky vnitřním paralelním kapacitám (např. Millerova kapacita bip. tranzistoru) Nízké frekvence – zesílení klesá s poklesem frekvence díky použití sériových kapacit ve vazbách přenosové pásmo F BW = F HI – F LO (body s poklesem zesílení o -3dB, tj. 1/√ 2) Zesilovače - přenos
 Nízké frekvence – zesílení klesá s poklesem frekvence díky použití sériových kapacit ve vazbách přenosové pásmo F BW = F HI – F LO (body s poklesem zesílení o -3dB, tj. 1/√ 2) Zesilovače - přenos.")
27
Bodeho diagram Modulová a fázová frekvenční charakteristika jednostupňového střídavého zesilovače Bodeho diagram +45° -45° -3dB 0dB

28
Bodeho diagram Logaritmické modulové (dB) a fázové charakteristiky jednotlivých stupňů se sčítají 1 stupeň – 20dB/dek, posuv +/- 90deg 2 stupně – 40dB/dek, posuv +/- 180deg 3 stupně – 60dB/dek, posuv +/- 270deg Vícestupňové zesilovače Kritické pro možnost oscilací S počtem stupňů se zužuje přenosové pásmo
 a fázové charakteristiky jednotlivých stupňů se sčítají 1 stupeň – 20dB/dek, posuv +/- 90deg 2 stupně – 40dB/dek, posuv +/- 180deg 3 stupně – 60dB/dek, posuv +/- 270deg Vícestupňové zesilovače Kritické pro možnost oscilací S počtem stupňů se zužuje přenosové pásmo")
29
Stabilita zesilovače

30
Rozdělení vazeb dle zapojení k výstupu Napěťová vazbaProudová vazba klesároste výstupní odpor

31
Rozdělení vazeb dle připojení ke vstupu Seriová vazbaParalelní vazba klesároste vstupní odpor

32
Záporná zpětná vazba Záporná ZV rozšiřuje přenosové pásmo, snižuje zkreslení zlepšuje stabilitu zesílení ( vs. A 0 ) modifikuje vst./výst. impedanci
 modifikuje vst./výst. impedanci.")
33
Kladná zpětná vazba-oscilátory Oscilátor s T – článkem (harmonický sinusový průběh) Stupeň vazby se řídí potenciometrem Oscilátor s trafo-vazbou (neharmonický obdélníkový průběh) Oscilátor-multivibrátor využívající nabíjení-vybíjení RC členů
 Stupeň vazby se řídí potenciometrem Oscilátor s trafo-vazbou (neharmonický obdélníkový průběh) Oscilátor-multivibrátor využívající nabíjení-vybíjení RC členů")
35
Typy zdrojů signálu a měřících systémů Většina výstupů čidel po úpravě signálu představuje zdroj napětí Zdroje i měřicí systémy bývají uzemněné nebo plovoucí

36
Rozdělení zdrojů signálu Uzemněné zdrojeNeuzemněné (plovoucí) zdroje Typicky zdroje signálu napájené z elektrické sítě. Země dvou zdrojů nemusí být nutně na stejné potenciálu. I při napojení na stejný rozvod elektřiny v budově rozdíly 10-200 mV. Při špatném propojení více. Typicky baterie a zdroje napájené z baterie, termočlánky, transformátory, izolační zesilovače atd.

37
Diferenciální měřící systém Žádný ze vstupů nepřipojen k pevnému potenciálu (např. zemi) Bateriově napájené měřicí přístroje, systémy s přístrojovými zesilovači (diferenciální zesilovač s velkou vstupní impedancí v obou větvích Ideálně U m = A*(U + - U - ) Napětí přítomné současně na obou vstupech – součtové napětí (common-mode voltage) – ideálně potlačeno, prakticky omezení rozsahu, konečný činitel potlačení součtového napětí U m = A*(U + - U - ) + A/K CMRR *(U + + U - )/2 Činitel K CMRR klesá s frekvencí Měření K CMRR
 Bateriově napájené měřicí přístroje, systémy s přístrojovými zesilovači (diferenciální zesilovač s velkou vstupní impedancí v obou větvích Ideálně U m = A*(U + - U - ) Napětí přítomné současně na obou vstupech – součtové napětí (common-mode voltage) – ideálně potlačeno, prakticky omezení rozsahu, konečný činitel potlačení součtového napětí U m = A*(U + - U - ) + A/K CMRR *(U + + U - )/2 Činitel K CMRR klesá s frekvencí Měření K CMRR.")
38
Uzemněný (opřený o zem) měřící systém - GRSE Měření napětí se provádí proti zemnímu vodiči
 měřící systém - GRSE Měření napětí se provádí proti zemnímu vodiči")
39
Nezemněné (pseudodiferenciální) měření - NRSE Měření napětí na různých vstupech proti společnému referenčnímu vodiči – není přímo spojen se zemí
 měření - NRSE Měření napětí na různých vstupech proti společnému referenčnímu vodiči – není přímo spojen se zemí")
40
Měření uzemněných zdrojů 1 Pozor na připojení uzemněných zdrojů k uzemněným měřícím systémům !! chybové napětí U g -> ss i st šum, působí proud zemní smyčkou, lze tolerovat u zdrojů signálu s velkou amplitudou při nízkoimpedančním spojení zemí

41
Měření uzemněných zdrojů 2 Lepší připojení k diferenciálním nebo pseudodiferenciální m systémům – rozdíl zemních potenciálů (souhlasné napětí) se neměří Non -
 se neměří Non -")
42
Měření plovoucích zdrojů 1 Součtové napětí nesmí přesáhnout bezpečné meze – u diferenciálních a pseudodiferenciálních zapojení nutno kontrolovat (zbytkové vstupní proudy zesilovačů !) U ss vazby postačí jeden odpor, ale vstupy nevyvážené – větší šum
 U ss vazby postačí jeden odpor, ale vstupy nevyvážené – větší šum")
43
Měření plovoucích zdrojů 2 U zemněného měřícího systému nevzniká zemní proudová smyčka Pseudodiferenciální vstupy odolnější proti šumu

44
Elmg. šum v měřících systémech Zdroje šumu – st napájecí přívody (50Hz), počítačové monitory, číslicové obvody, vysokonapěťové a silové zdroje, spínané napájecí zdroje, motory a silové spínače, výboje Přenos – vazba konduktivní (společná zátěž), v. kapacitní (elektrické pole), v. induktivní (magnetické pole), v. radiační (elmg. pole) Přijímač – čidla, přívody k obvodům pro úpravu signálu, vlastní obvody úpravy signálu, přívody k měřicímu systému Potlačení – rozdělení napájecích (silových) a signálových zemí, stínění, zvětšení vzdáleností, balancované diferenciální obvody, … Elektromagnetická interference (EMI) Elektromagnetická kompatibilita (vydržím bezchybně pracovat do jisté úrovně vnější EMI, nebudu vyzařovat vlastní EMI nad stanovenou mez)
, počítačové monitory, číslicové obvody, vysokonapěťové a silové zdroje, spínané napájecí zdroje, motory a silové spínače, výboje Přenos – vazba konduktivní (společná zátěž), v. kapacitní (elektrické pole), v. induktivní (magnetické pole), v. radiační (elmg. pole) Přijímač – čidla, přívody k obvodům pro úpravu signálu, vlastní obvody úpravy signálu, přívody k měřicímu systému Potlačení – rozdělení napájecích (silových) a signálových zemí, stínění, zvětšení vzdáleností, balancované diferenciální obvody, … Elektromagnetická interference (EMI) Elektromagnetická kompatibilita (vydržím bezchybně pracovat do jisté úrovně vnější EMI, nebudu vyzařovat vlastní EMI nad stanovenou mez).")
45
Nevhodné stínění - zemní smyčka Vhodné zapojení stínění Přenos šumu konduktivní vazbou

46
Přenos šumu kapacitní vazbouPřenos šumu induktivní vazbou

47
Balancované zapojení Shodná impedance vývodů zdroje a vstupů měřícího systému proti zemi, shodná impedance vodičů proti zemi Šum kapacitní vazbou -> součtový signál -> na rozdílové hodnotě Vm se neprojeví šum ~ signál

48
Diferenciální a common-mode šum

49
Použití bifilárních tlumivek k potlačení common-mode šumu #1

50
Použití bifilárních tlumivek k potlačení common-mode šumu #2

51
Příklad – filtrace rušení ve stejnosměrném obvodu

52
Příklad – filtrace rušení ve střídavém obvodu Vnitřní zdroj rušení

53
Galvanická izolace Oddělení obvodů, přerušení zemních smyček Oddělení NN a VN obvodů, ovládání VN Bezpečnost el. Zařízení Metody –Elektromechanické – relé, stykače –Elektromagnetické – transformátor, near-RF pole –Optické - opto-izolátor, optická vlákna –Kapacitní oddělení –Magnetické – prvky založené na Hallově jevu –Magnetické – prvky založené na magnetorezistenci

55
Číslicové zpracování signálu Digitalizace – 3 fáze –Vzorkování vzorkovací obvod –Kvantování vlastní A/D převodník –Kódování

56
Vzorkovací obvod

57
Vzorkovací obvod - realizace Sample and hold

58
Detektor špiček

59
Charakteristiky vzorkovacího obvodu

60
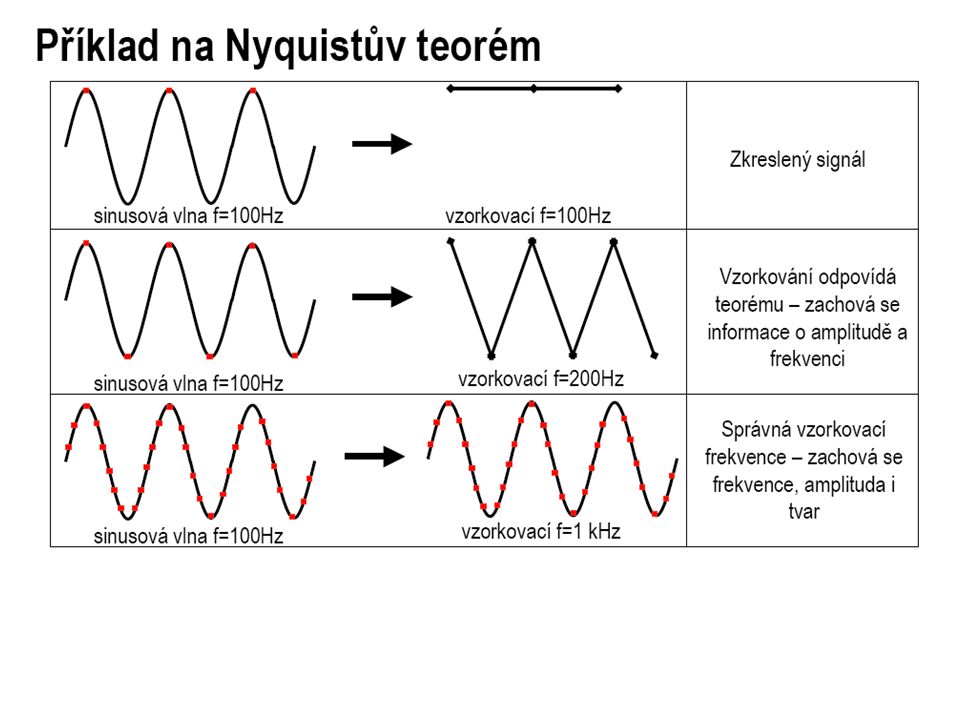
Obsahuje-li frekvenční spektrum signálu složky s frekvencí větší než Nyquistova frekv. (f N =f V /2), neurčuje výstupní signál vzorkovacího obvodu jednoznačně průběh signálu na vstupu:
, neurčuje výstupní signál vzorkovacího obvodu jednoznačně průběh signálu na vstupu:.")
62
Aliasing

63
Charakteristiky A/D převodníku Počet kanálů, způsob připojení zdroje signálu Vzorkovací rychlost Délka vzorku Možnost multiplexování Rozlišení <- počet bitů Rozsah Šířka kódu <- zisk, rozsah, rozlišení Diferenciální a integrální nelinearita, chybějící kódy, relativní chyba, offset, čas ustavení vstupního zesilovače, vlastní šum převodníku, ENOB – efektivní rozlišení v bitech V 16bitů 3bity

64
Kvantování

65
Kvantování, kvantovací chyba Přenosová funkce A/D převodníku Kvantovací chyba

66
Dithering Zvýšení amplitudového rozlišení přidáním malého šumu do analogového signálu před digitalizací a následným průměrováním

67
Relativní chyba, offset, INL, DNL Ideální charakteristikaSkutečná charakt.Integrální nelinearitaDiferenciální nelinearita Offset

68
Vliv nelinearit na přenosovou charakteristiku A/D a D/A převodníku

69
Charakteristiky D/A převodu Rozsah Čas ustavení výstupu Výstupní rozlišení Rychlost přeběhu Typ reference – pevná reference x násobící D/A Diferenciální a integrální nelinearita, chybějící kódy, relativní chyba, offset, vlastní šum převodníku, ENOB – efektivní rozlišení v bitech

70
Příklady D/A převodníků Sumační DAC DAC s žebříčkem R – 2R DAC s řetízkem R

71
Příklady A/D převodníků ADC s dvojitou integrací ADC s postupnou aproximací (metoda vážení) obecný ADC s DAC a logikou V in = V ref * N / M Pipeline
 obecný ADC s DAC a logikou V in = V ref * N / M Pipeline")
73
Definice logických signálů

74
Definice logických úrovní H L Vmin Vmax V IL V IH V OL V OH

75
Porovnání logických standardů

76
Porovnání logických standardů vč. diferenciálních

77
Logické signály - časování Logické úrovně Časování Hodinový signál Aktivní hrana Setup a hold interval f = 1/t p

78
Chyby hodinových signálů Jitter Drift Hodinové signály na přijímací a vysílací straně Vysílač Přijímač Data Hodiny zpoždění

79
Chyby hodinových signálů Jitter Drift Hodinové signály na přijímací a vysílací straně Vysílač Přijímač Data Hodiny_B Hodiny_A

80
Nepřímé – čas (periodu, délku pulzu) nebo frekvenci vstupního signálu převedeme vhodným obvodem na analogový signál a A/D převodníkem určíme jeho amplitudu, např.: –měření délky velmi krátkých pulzů (< 10 -9 s) – napětí (náboj) na kondenzátoru je úměrný době otevření spínače SW1 (délce řídícího pulzu) Měření času a frekvence V O = I / C * t
 nebo frekvenci vstupního signálu převedeme vhodným obvodem na analogový signál a A/D převodníkem určíme jeho amplitudu, např.: –měření délky velmi krátkých pulzů (< s) – napětí (náboj) na kondenzátoru je úměrný době otevření spínače SW1 (délce řídícího pulzu) Měření času a frekvence V O = I / C * t")
81
Měření času a frekvence Nepřímé – čas (perioda, délka pulzu) nebo frekvenci vstupního signálu převedeme vhodným obvodem na analogový signál a A/D převodníkem určíme jeho amplitudu, např.: –Měření frekvence pulzů pevné délky – amplituda výstupního signál V O je úměrná frekvenci signálu řídícího spínač SW1 V O = * V ref
 nebo frekvenci vstupního signálu převedeme vhodným obvodem na analogový signál a A/D převodníkem určíme jeho amplitudu, např.: –Měření frekvence pulzů pevné délky – amplituda výstupního signál V O je úměrná frekvenci signálu řídícího spínač SW1 V O = * V ref")
82
Čítače (pulzně-šířková modulace) (čidla kódující polohu)
 (čidla kódující polohu)")
83
Měření času, frekvence Přímé měření času – s použitím čítače a zdroje referenčního kmitočtu F = 1 / T t = N / F, přesnost N je 1 t.j. t = 2 T Možná zpřesnění: - interpolace uvnitř periody T - systém nonia (2 málo odlišné nesoudělné frekvence, dva čítače) měřený interval t načítáno N pulzů
 měřený interval t načítáno N pulzů.")
84
Měření času, frekvence Přímé měření frekvence – s použitím čítače a zdroje referenčního kmitočtu F = 1 / T, vstupní pulsy neznámé frekvence čítáme po definovanou dobu T m = m*T, f = N / T m = N*F/m, přesnost závisí na stabilitě F a četnosti N (< 2 n, n.. bitová šířka čítače ) Možná zpřesnění – prodloužení T m a zvýšení bitové šířky čítače - u velmi malých frekvencí je lépe měřit periodu interval čítání T m načítáno N pulzů vstupní pulzy frekvence f
 Možná zpřesnění – prodloužení T m a zvýšení bitové šířky čítače - u velmi malých frekvencí je lépe měřit periodu interval čítání T m načítáno N pulzů vstupní pulzy frekvence f.")
85
Měření času, frekvence Přímé měření frekvence – zpřesnění s použitím čítače a zdroje referenčního kmitočtu F = 1 / T, vstupní pulsy čítáme během intervalu T x synchronizovaného se vstupními pulsy do načtení N hodinových pulsů, platí f = N / T x f = N*F/ (m 1) Skutečný interval čítání T x = (m 1)*T načítáno N pulzů vstupní pulsy frekvence f Nominální interval čítání T m = m*T
 Skutečný interval čítání T x = (m 1)*T načítáno N pulzů vstupní pulsy frekvence f Nominální interval čítání T m = m*T")
87
Převodníky vybraných základních fyzikálních veličin Teplota Optické záření Magnetické pole Napětí/frekvence Tlak Síla, zrychlení Poloha Průtok vlhkost Chemické senzory Převádí detekovanou fyzikální veličinu na měřitelný elektrický signál (proud,napětí,frekvence)
")
88
Senzory pro měření teploty

89
Odporový teploměr Pt zpravidla 100 Ω pro 0 0 C Vysoká přesnost a vynikající stabilita a linearita Rozsah použití zpravidla 0 až 450 0 C, lze až 800 0 C R L = odpor přívodních vodičů, kompenzace chyby měření pomocí 4 drátového zapojení

90
Termočlánek Seebeckovo napětí vznikající na kontaktu 2 různých kovů Široký rozsah teplot Rychlá odpověď na změnu Nízká cena Pasívní prvek Nutnost kompenzovat studený přechod hodnota nelineárně závislá na T

91
Elektronická kompenzace studeného přechodu

92
Analogový polovodičový teplotní detektor Přímý lineární převod teploty na napětí nebo na proud

93
Digitální polovodičový teplotní detektor Přímý převod teploty na digitální údaj, Přesnost jednoduchých senzorů typ. ± 0.5 °C, teplotní rozsah dosti omezený -40 až +150 °C Výstupem pulzní šířková modulace (PWM) nebo digitální sběrnice (např. I2C) PWM senzor
 nebo digitální sběrnice (např. I2C) PWM senzor.")
94
Teplotní senzor s digitálním výstupem

95
Optické detektory Zařízení, které zajišťuje přeměnu dopadajících fotonů optického záření na měřitelnou fyzikální veličinu – signál (např. elektrický - napětí, proud) -Tepelné detektory : přeměna energie fotonu na teplo (málo efektivní a pomalé) -Fotoelektrické detektory : následkem absorpce fotonů v určité látce dojde k vytvoření pohyblivých nosičů náboje, které se působením elektrického pole přemisťují a vytvářejí měřitelný elektrický proud
 -Tepelné detektory : přeměna energie fotonu na teplo (málo efektivní a pomalé) -Fotoelektrické detektory : následkem absorpce fotonů v určité látce dojde k vytvoření pohyblivých nosičů náboje, které se působením elektrického pole přemisťují a vytvářejí měřitelný elektrický proud.")
96
Charakteristika optického detektoru Kvantový výtěžek (QE) – měřítko efektivnosti konverze fotonů dopadajících na plochu detektoru na elektrický náboj, v oblasti viditelného záření je vždy menší než 1. Citlivost detektoru (A/W) – poměr fotoproudu a dopadající radiační zářivé energie
 – poměr fotoproudu a dopadající radiační zářivé energie.")
97
Detekce optického záření polovodičovými detektory Fotorezistor Fotodioda (Si planární, PIN, Schotky) Nejvýznamější projev vnitřní fotoemise je fotovodivost Absorpcí fotonu ve vlastním polovodiči generuje volný elektron, excitovaný z valenčního do vodivostního pásu. Současně je generována díra ve valenčním pásu. Přiložení elektrického pole na materiál vede k transportu vytvořených nosičů materiálem a ke vzniku elektrického proudu v obvodu detektoru

98
Polovodičové fotodiody Fotodioda je tvořena p-n přechodem, jehož závěrný proud stoupá při absorpci fotonů. Při absorpci fotonu se vytváří pár elektron-díra. V oblasti elektrického pole p-n přechodu (tzv. ochuzená vrstva) mohou být vytvářené nosiče náboje transportovány směrem k elektrodám. K vytváření fotoelektrického proudu přispívají pouze nosiče generované v oblasti p-n přechodu a jeho bezprostřední blízkosti, oblasti (1) a (2). Vyrábějí se z mnoha polovodičových materiálů a sloučenin: Si, Ge, AlP,AlAs, AlSb, GaP,GaAs,GaSb,InP,InAs,InSb,InGaAs,InGaAsP, HgCdTe, CdTe, CdZnTe
 mohou být vytvářené nosiče náboje transportovány směrem k elektrodám. K vytváření fotoelektrického proudu přispívají pouze nosiče generované v oblasti p-n přechodu a jeho bezprostřední blízkosti, oblasti (1) a (2). Vyrábějí se z mnoha polovodičových materiálů a sloučenin: Si, Ge, AlP,AlAs, AlSb, GaP,GaAs,GaSb,InP,InAs,InSb,InGaAs,InGaAsP, HgCdTe, CdTe, CdZnTe.")
99
Planární difusní typPIN Náhradní elektrický obvod Voltampérová charakteristika

100
Fotodioda v zapojení převodník I/U

101
Si fotodiody Si PIN fotodiody – nízká kapacita, pro vysokorychlostní fotometrii S vestavěným zesilovačem a chlazením

102
Diodová pole (PDA Photodiode Array ) Počet detekčních prvků zpravidla 16 až 64, ale může jich být i 1024 a jsou určeny především pro určování polohy a pro multikanálovou fotometrii s nižšími nároky na citlivost a spektrální rozlišení.
 Počet detekčních prvků zpravidla 16 až 64, ale může jich být i 1024 a jsou určeny především pro určování polohy a pro multikanálovou fotometrii s nižšími nároky na citlivost a spektrální rozlišení.")
103
Fotonásobič - princip funkce Velmi citlivá elektronická součástka k detekci slabého záření. Záření dopadající na fotokatodu z ní uvolní několik primárních elektronů. Tyto elektrony jsou urychlovány k dalším elektrodám (dynodám) a na každé z nich uvolní další sekundární elektrony. Vzniká stále silnější proud elektronů, který vyvolá na anodě fotonásobiče měřitelný elektrický impulz.
 a na každé z nich uvolní další sekundární elektrony. Vzniká stále silnější proud elektronů, který vyvolá na anodě fotonásobiče měřitelný elektrický impulz..")
104
Fotonásobič Vysoce citlivé detektory optického záření, hojně využívané ve především spektroskopii

105
Typy uspořádání dynod

106
Mikrokanálkový zesilovač Vysoce citlivé detektory založené na principu fotonásobiče, používají se k „zesílení“ obrazu před vlastním fotodetektorem

107
Maticové detektory Obsahují velký počet maticově uspořádaných fotodetektorů (tzv. pixelů) a mohou tak zaznamenávat časovou závislost fotonových toků v mnoha bodech prostoru Dovolují vytvořit elektronickou verzi optického obrazu
 a mohou tak zaznamenávat časovou závislost fotonových toků v mnoha bodech prostoru Dovolují vytvořit elektronickou verzi optického obrazu.")
108
CCD detektory CCD = Charge Coupled Device (nábojově vázaná struktura) –Vysoká citlivost, často je třeba chlazení detektoru – term.šum (TE, LN) –Má integrační charakter podobně jako fotografický film
 –Vysoká citlivost, často je třeba chlazení detektoru – term.šum (TE, LN) –Má integrační charakter podobně jako fotografický film")
109
Princip funkce detekční buňky (pixelu) Vychází z technologie unipolárních tranzistorů. Na povrchu monokrystalického substrátu P je vytvořena velmi tenká dielektrická izolace (nejčastěji SiO2) a na ní řada těsně sousedících vzájemně izolovaných elektrod. Elektrody jsou periodicky připojeny k řadě sběrnic. Na začátku a na konci struktury jsou v substrátu vytvořeny ostrůvky N+, z nichž vedou ohmické kontakty k vnějšímu zdroji signálu a zátěži. Princip práce spočívá v tom, že na sběrnicích mohou být různá napětí. Při nenulovém napětí na sběrnici vznikne ekvivalent vodivého kanálu N. Protože se nejedná o kanál v pravém slova smyslu, užívá se termín potenciálová jáma, její „hloubka“ závisí na přivedeném napětí. Tam, kde sousedí „mělká“ a „hluboká“ jáma, existuje s povrchem rovnoběžná (laterální) složka intenzity elektrického pole, směřující od hluboké jámy k mělké. Proto budou elektrony z „mělké“ jámy přesunuty do jámy „hluboké“. Volné elektrony jsou v kanálu N (potenciálové jámě) nositeli majoritními, takže pravděpodobnost jejich rekombinace je malá a mohou se v ní udržet poměrně dlouho
 a na ní řada těsně sousedících vzájemně izolovaných elektrod. Elektrody jsou periodicky připojeny k řadě sběrnic. Na začátku a na konci struktury jsou v substrátu vytvořeny ostrůvky N+, z nichž vedou ohmické kontakty k vnějšímu zdroji signálu a zátěži. Princip práce spočívá v tom, že na sběrnicích mohou být různá napětí. Při nenulovém napětí na sběrnici vznikne ekvivalent vodivého kanálu N. Protože se nejedná o kanál v pravém slova smyslu, užívá se termín potenciálová jáma, její „hloubka závisí na přivedeném napětí. Tam, kde sousedí „mělká a „hluboká jáma, existuje s povrchem rovnoběžná (laterální) složka intenzity elektrického pole, směřující od hluboké jámy k mělké. Proto budou elektrony z „mělké jámy přesunuty do jámy „hluboké . Volné elektrony jsou v kanálu N (potenciálové jámě) nositeli majoritními, takže pravděpodobnost jejich rekombinace je malá a mohou se v ní udržet poměrně dlouho.")
110
Architektura detektoru a slučování detekčních buněk (binning) - Zvýšení citlivosti detekce sumací buněk - kapacita detekční buňky je limitována určitým množstvím náboje.
 - Zvýšení citlivosti detekce sumací buněk - kapacita detekční buňky je limitována určitým množstvím náboje.")
111
Typy architektury čipu Full frame detektor Interline detektor

112
Front a Back illuminated architektura Osvětlení detektoru „zezadu“ eliminuje jeho zastínění strukturou elektrod a hradel a QE se zvyšuje na více než dvojnásobek.

113
Rozšíření citlivosti do UV oblasti Fosforová vrstva rozšíří citlivost v oblasti 200 až 430 nm

114
Provedení CCD detektorů

115
Tenzometr Kovová folie nebo tenký vodič s proměnným odporem v závislosti na mechanickém napětí. Změny odporu jsou malé - detekuje se v zapojení Wheatstoneova můstku

116
Detektory zrychlení (akcelerometry) Měření vibrací a zrychlení (jednoosé a víceosé typy) Založeny jsou na principu připevnění tělesa o známé hmotnosti k piezoelektrickému elementu
 Měření vibrací a zrychlení (jednoosé a víceosé typy) Založeny jsou na principu připevnění tělesa o známé hmotnosti k piezoelektrickému elementu")
117
Detektory stacionárního magnetického pole Založeny na Hallově jevu, výstupní napětí je přímo úměrné intenzitě magnetického pole kolmého k povrchu pouzdra

118
Senzory polohy a posuvu Čidlo lineárního posuvu LVDT (Linear variable differential transformer) Převádí údaj o poloze na elektrický signál s velmi vysokou přesností Konstrukce : NiFe jádro,pohybující se v soustavě cívek (jedna primární – budící a 2 detekční)
 Převádí údaj o poloze na elektrický signál s velmi vysokou přesností Konstrukce : NiFe jádro,pohybující se v soustavě cívek (jedna primární – budící a 2 detekční)")
119
Obvodové řešení LVDT Hybridní integrované detekční moduly, případně i vsuvné PC karty Budící cívka je sinusově modulována z oscilátoru, základem detekční části je demodulátor a filtr, výsledkem je výstupní stejnosměrné napětí proporcionální k poloze jádra BuzeníDetekce

120
Tlak Založené na LVDT senzoru

121
Piezoelektrický princip

122
Optický princip

123
Detektor vakua Termočlánkový princip založený na teplotní vodivosti mezi detektorem a rozžhaveným drátkem 1- 10 -3 torr Emise elektronů z rozžhavené katody 10 -2 až 10 -10 torr

124
Průtokoměr Lineární závislost na průtoku Minimální závislost na viskozitě

125
Chemický senzor ISFET

126
Čidla vlhkosti Rezistivní/kapacitní typ IR typ

127
Převod napětí na frekvenci Napěťově řízený oscilátor Vynikající pro přenos analogového údaje na velkou vzdálenost beze ztráty informace 2 typy : multivibrátorový a „charge balance“ (přesnější) Multivibrátorový typ
 Multivibrátorový typ")
128
Princip „charge balance“ Obsahuje integrátor,přesný proudový zdroj a komparátor – v okamžiku dosažení přepnutí komparátoru je přepnut proudový zdroj, který nadávkuje přesné množství náboje Reset mód Integrate mód

129
Funkční generátor Založen na napěťově řízeném oscilátoru

130
Akční prvky Jsou to hardwarové prostředky, určené se k přímému řízení požadovaných hodnot parametrů ovládaného procesu na základě výstupního elektronického signálu Nejdůležitější typy : –Spínače elektrického proudu a napětí –Krokové motory (převod polohy) –Elektromagnetické ventily (regulace průtoku)
 –Elektromagnetické ventily (regulace průtoku)")
131
Elektronické spínače Pasivní –elektronická relé Aktivní –tranzistory (Bipolární a výkonové MOSFET) –Tyristory –Triaky –Polovodičová relé
 –Tyristory –Triaky –Polovodičová relé")
132
Spínací a rozpínací relé

133
Tyristor Je čtyřvrstvý spínací prvek, tj. prvek obsahující tři přechody PNPN a používá se pro bezeztrátovou regulaci výkonu.

134
Tyristor Tyristor si můžeme představit jako dva bipolární tranzistory, jeden PNP a druhý NPN. Emitor tranzistoru PNP je přiložen na kladný pól zdroje napětí, emitor tranzistoru NPN na záporný pól, do řídicí elektrody G tyristoru nechť teče proud IG. Podle 1. Kirchhoffova zákona o proudech v uzlu musí platit I2=IG+I1 a také, uvážíme-li, že α 1.I1 je kolektorový proud PNP tranzistoru a a2I2 kolektorový proud NPN tranzistoru (emitorový proud je I2), musí být I2= α1.I1+ α2.I2 (zanedbávali jsme zbytkové proudy a IG vůči α 1.I1). Z těchto dvou rovnic pak máme pro I2 výraz I2=- α 1IG/(1-(α1+ α 2)). Pokud je součet proudových zesílení α 1+ α 2 přibližně roven jedné, může být proud I2 velmi veliký i když proud řídicí elektrodou IG je velmi malý. Jako proud IG může fungovat i závěrný proud kolektorové diody PNP tranzistoru, který, jak víme, může při překročení mezního dovoleného kolektorového napětí vzrůst lavinovitým průrazem kolektorového přechodu. Jakmile je jednou tyristor ve vodivém stavu, zůstává ve vodivém stavu tak dlouho, dokud se proud I2 nesníží pod určitou hodnotu, neboť tranzistory se vzájemně podporují v otevřeném stavu - sepnutým tranzistorem NPN teče záporný proud do báze tranzistoru PNP a opačně sepnutým tranzistorem PNP teče proud do báze tranzistoru NPN. Rozpojíme-li obvod, vrátí se za určitou krátkou dobu (řádově 100 ns) tyristor do výchozího stavu, ze kterého jej můžeme opět sepnout. Totéž se stane, zmenšíme-li proud tyristorem ne úplně na nulu, ale pod hodnotu tzv. přídržného proudu IH, který je parametrem daného typu tyristoru.
, musí být I2= α1.I1+ α2.I2 (zanedbávali jsme zbytkové proudy a IG vůči α 1.I1). Z těchto dvou rovnic pak máme pro I2 výraz I2=- α 1IG/(1-(α1+ α 2)). Pokud je součet proudových zesílení α 1+ α 2 přibližně roven jedné, může být proud I2 velmi veliký i když proud řídicí elektrodou IG je velmi malý. Jako proud IG může fungovat i závěrný proud kolektorové diody PNP tranzistoru, který, jak víme, může při překročení mezního dovoleného kolektorového napětí vzrůst lavinovitým průrazem kolektorového přechodu. Jakmile je jednou tyristor ve vodivém stavu, zůstává ve vodivém stavu tak dlouho, dokud se proud I2 nesníží pod určitou hodnotu, neboť tranzistory se vzájemně podporují v otevřeném stavu - sepnutým tranzistorem NPN teče záporný proud do báze tranzistoru PNP a opačně sepnutým tranzistorem PNP teče proud do báze tranzistoru NPN. Rozpojíme-li obvod, vrátí se za určitou krátkou dobu (řádově 100 ns) tyristor do výchozího stavu, ze kterého jej můžeme opět sepnout. Totéž se stane, zmenšíme-li proud tyristorem ne úplně na nulu, ale pod hodnotu tzv. přídržného proudu IH, který je parametrem daného typu tyristoru..")
135
Použití tyristoru je zejména vhodné v obvodech střídavého napětí, neboť každý průchod napětí nulou automaticky vypne tyristor a ten čeká na další zapnutí. Jediné, co je zapotřebí k regulaci výkonu pomocí tyristoru, je zařízení, které ”vyrobí” spouštěcí puls do tyristoru ve vhodné fázi periody střídavého napětí. Nejjednodušší je použít pro řízení fáze jednoduchého RC členu s měnitelnou časovou konstantou RC například pomocí proměnného odporu. Je-li odpor nastaven na nulu, spíná se tyristor prakticky okamžitě po průchodu napětí nulou, je-li odpor nastaven na větší hodnotu, zpožďuje se napětí na kondenzátoru za napětím na tyristoru a ten zapne až za určitý čas po průchodu napětí nulou; výkon na zátěži bude v tomto případě menší.

136
Triak Pro relativně malé výkony, tj. pro napětí typická v rozvodné síti a proudy do několika ampér byly vyvinut pětivrstvý spínací prvek - Triak. Je možno jej považovat za dvojici antiparalelně zapojených tyristorů, ale jeho řídící elektroda je zapojena tak, že ho lze ovládat proudem libovolné polarity. Je-li na anodě A1 záporné napětí vzhledem k A2, bude v propustném směru pólovaná levá část, pravá část je v závěrném směru. Přivedeme-li do obvodu řídící elektrody proud, sepneme tím obě poloviny triaku. které pracují stejně jako dva antiparalelně zapojené tyristory s tím rozdílem, že mají jen jednu řídicí elektrodu. Zatímco tyristory jsou určeny pro řízení výkonů až do řádu megawattů, triaky vzhledem ke své složitější struktuře a tím větší náchylnosti na průraz zůstávají doménou pro regulaci nízkovýkonových elektrických spotřebičů; jejich výhoda tkví v jednoduchosti zapojení. Výstupní charakteristiky tvoří soustavu symetrických křivek, parametrem je proud řídící elektrodou IGT, přičemž IGT může mít libovolný směr. Charakteristiky mají stejný tvar, jaký odpovídá dvěma antiparalelně zapojeným tyristorům. Oblast blokovací charakteristiky začíná u nulového napětí a končí u průrazného napětí. V této části charakteristiky představuje triak vysoký odpor, propouštěný proud je velmi malý. Přes oblast negativního diferenciálního odporu (čárkovaná čára) přechází charakteristika do propustné oblasti. Podobně jako u tyristoru představuje triak v této části charakteristiky malý odpor, proud musí být omezen zátěží. V této oblasti charakteristiky je důležitý vratný proud IL, který musí téci mezi hlavními elektrodami A1 a A2, aby při odpojení řídící elektrody zůstal triak v sepnutém stavu. Přídržný proud IH udává hodnotu, pod kterou nesmí klesnout proud triakem, aby se udržel v sepnutém stavu.
 přechází charakteristika do propustné oblasti. Podobně jako u tyristoru představuje triak v této části charakteristiky malý odpor, proud musí být omezen zátěží. V této oblasti charakteristiky je důležitý vratný proud IL, který musí téci mezi hlavními elektrodami A1 a A2, aby při odpojení řídící elektrody zůstal triak v sepnutém stavu. Přídržný proud IH udává hodnotu, pod kterou nesmí klesnout proud triakem, aby se udržel v sepnutém stavu..")
137
Fázové řízení spínacích prvků Pro fázové řízení triaků a tyristorů byly vyvinuty integrované obvody, které umožňují ”lineární” řízení fáze spouštění. V každé půlperiodě ”vyrobí” lineárně vzrůstající pilovité napětí a tyristor se sepne v okamžiku, kdy se toto napětí vyrovná konstantnímu napětí řízenému zvnějšku potenciometrem. Fáze sepnutí je tedy přímo úměrná

138
Polovodičové relé Pracuje stejně jako klasické relé. Pomocí malého výkonu na vstupu – řádově mW spínáme na výstupu výkony řádově W až kW. Vstupní a výstupní obvody jsou galvanicky odděleny, vazba je pouze optická uvnitř relé. Spínání je prováděno polovodičovými prvky – triaky nebo antiparalelně zapojenými tyristory. Díky vnitřním logickým obvodům spínají a vypínají v oblastech blízkých průchodu napětí nulou, takže se minimalizuje elektromagnetické rušení.

139
Krokové motory krokový motor s 200 kroky na otáčku (1.8 stupně na krok) Dovedou přesně nastavit svoji polohu a tuto polohu i přes působící síly udržet. Stator krokového motoru je tvořen sadou cívek. Pólové nástavce statoru jsou vroubkovány se stejnou roztečí jako je rozteč magnetů na rotoru. Toto je jedna z částí zvyšující přesnost motoru při stejném počtu cívek. Rotor je tvořen hřídelí usazenou na kuličkových ložiskách a prstencem permanentních magnetů. Proud procházající cívkou statoru vytvoří magetické pole, které přitáhne opačný pól magnetu rotoru. Vhodným zapojováním cívek dosáhneme vytvoření rotujícího magnetického pole, které otáčí rotorem. Podle požadovaného kroutícího momentu, přesnosti nastavení polohy a přípustného odběru volíme některou z variant řízení. - unipolární - bipolární

140
Metody řízení krokových motorů Při unipolárním řízení prochází v jednom okamžiku právě jednou cívkou. Motor s tímto buzením má nejmenší odběr, ale také poskytuje nejmenší kroutící moment. Výhodou tohoto řešení je jednoduché zapojení řídící elektroniky - v podstatě stačí jeden tranzistor na každou cívku. Při bipolárním řízení prochází proud vždy dvěma protilehlými cívkami. Ty jsou zapojené tak, že mají navzájem opačně orientované magnetické pole. Motor v tomto režimu poskytuje větší kroutící moment, ovšem za cenu vyšší spotřeby. Jednofázové a dvoufázové řízení Jednofázové řízení znamená, že magnetické pole generuje pouze jedna cívka (případně dvojice cívek při bipolárním buzení). Při dvoufázovém řízení generují shodně orientované magnetické pole vždy dvě sousední cívky. Daní za vyšší kroutící moment je dvojnásobná spotřeba oproti řízení jednofázovému. Řízení s plným versus polovičním krokem Řízení s plným krokem znamená, že na jednu otáčku je potřeba přesně tolik kroků, kolik zubů má stator daného motoru. Dosáhneme ho použitím kterékoliv doposud uvedené metody řízení. Řízením s polovičním krokem dosáhneme dvojnásobné přesnosti. Technicky se jedná o střídání kroků s jedno- a dvoufázovým řízením.
. Při dvoufázovém řízení generují shodně orientované magnetické pole vždy dvě sousední cívky. Daní za vyšší kroutící moment je dvojnásobná spotřeba oproti řízení jednofázovému. Řízení s plným versus polovičním krokem Řízení s plným krokem znamená, že na jednu otáčku je potřeba přesně tolik kroků, kolik zubů má stator daného motoru. Dosáhneme ho použitím kterékoliv doposud uvedené metody řízení. Řízením s polovičním krokem dosáhneme dvojnásobné přesnosti. Technicky se jedná o střídání kroků s jedno- a dvoufázovým řízením..")
141
Unipolární jednofázové s plným krokem Unipolární dvoufázové s plným krokem Unipolární s polovičním krokem Bipolární jednofázové s plným krokem Bipolární dvoufázové s plným krokem Bipolární s polovičním krokem

142
Příklad základního zapojení pro řízení motoru v unipolárním dvoufázovém režimu. Jako výkonový budič je použit obvod ULN2803. Ten obsahuje jednak ochranné diody, jednak invertor před každým výkonovým stupněm. To výrazně zjednodušuje dvoufázové řízení při malém počtu řídících linek.

144
Charakterizace procesů (veličiny proměnné v čase) Náhodný (stochastický) –nelze předvídat konkrétní budoucí průběh Deterministický –na základě historie lze určit další průběh Smíšený –deterministická (užitečný signál) a náhodná (šum) složka Jedno pozorování procesu – realizace Náhodný proces určen množinou všech možných realizací Pozorování NP v jednom okamžiku – řez (realizace nějaké náhodné veličiny) Popis NP – hustota rozdělení, integrální funkce rozdělení, statistické momenty, kvantily ad.
 Náhodný (stochastický) –nelze předvídat konkrétní budoucí průběh Deterministický –na základě historie lze určit další průběh Smíšený –deterministická (užitečný signál) a náhodná (šum) složka Jedno pozorování procesu – realizace Náhodný proces určen množinou všech možných realizací Pozorování NP v jednom okamžiku – řez (realizace nějaké náhodné veličiny) Popis NP – hustota rozdělení, integrální funkce rozdělení, statistické momenty, kvantily ad.")
145
Stacionární náhodné procesy Třída NP u nichž funkce rozdělení (momenty) nezávisejí na volbě časového počátku Lze zavést časovou střední hodnotu, časovou vzájemnou a auto-korelační funkci –autokorelační funkce periodického procesu je periodická se stejnou periodou Stacionarita – jen ideální - proces by se nemohl měnit v čase (požadujeme stacionaritu během doby zkoumání)
 nezávisejí na volbě časového počátku Lze zavést časovou střední hodnotu, časovou vzájemnou a auto-korelační funkci –autokorelační funkce periodického procesu je periodická se stejnou periodou Stacionarita – jen ideální - proces by se nemohl měnit v čase (požadujeme stacionaritu během doby zkoumání)")
146
Ergodické stacionární NP Obecně střední hodnoty přes realizace a podél (středování v čase jedné realizace) nejsou stejné Ergodická podmínka – –„Při sledování jednoho řezu dost velkého počtu realizací SNP se jednotlivé stavy projevují ve stejných poměrech, jako při pozorování jedné, dostatečně dlouhé realizace tohoto procesu“
 nejsou stejné Ergodická podmínka – –„Při sledování jednoho řezu dost velkého počtu realizací SNP se jednotlivé stavy projevují ve stejných poměrech, jako při pozorování jedné, dostatečně dlouhé realizace tohoto procesu")
Podobné prezentace

























 technická.>")

.>")
