Stáhnout prezentaci
Prezentace se nahrává, počkejte prosím

1
Snímače

2
Snímače Pro to abychom mohli cokoliv automaticky řídit či regulovat měřit nejrůznější veličiny a tomu potřebujeme senzory. Využívání elektroniky klade stále vyšší nároky na měření a vyhodnocování elektrických a neelektrických a tím i na vývoj a výrobu senzorů. Dnešní doba je spojena s vývojem a praktickým nasazením tzv. inteligentních senzorů připojených přes rozhraní do sběrnicových sítí (jako je „Fieldbus“).
.")
3
Snímače Velmi významnou a progresivní skupinu tvoří integrované senzory vyráběné na databázi křemíku, optické vláknové senzory včetně integrované optiky, chemické senzory atd. Nástup těchto nových měřících prvků je nutným předpokladem pro stále náročnější požadavky na automatizaci měření a zvyšování spolehlivosti při měření a zpracování dat.

4
Parametry a rozdělení sensorů
Nejprve trochu názvosloví : Čidlo nebo též senzor, detektor či receptor je vlastně vstupní prvek systému, přijímající informaci z okolí (proto je v přímém styku s měřeným prostředím) a po technické stránce je vstupní součástí snímače, na nějž přenáší fyzikální nebo technické parametry. Je tedy převodníkem jedné fyzikální veličiny na jinou fyzikální veličinu. Snímá přímo nebo nepřímo měřenou veličinu a převádí ji do informačního parametru informačního signálu a nemá měřenou veličinu ovlivňovat. Podle předem definovaného principu ji transformuje na měřící veličinu, která bude v našem případě většinou elektrická.
 a po technické stránce je vstupní součástí snímače, na nějž přenáší fyzikální nebo technické parametry. Je tedy převodníkem jedné fyzikální veličiny na jinou fyzikální veličinu. Snímá přímo nebo nepřímo měřenou veličinu a převádí ji do informačního parametru informačního signálu a nemá měřenou veličinu ovlivňovat. Podle předem definovaného principu ji transformuje na měřící veličinu, která bude v našem případě většinou elektrická.")
5
Čidla dělíme do dvou základních skupin :
aktivní pasivní.

6
Existují i senzory u kterých je neelektrická veličina transformována na elektrický signál, který je velmi často třeba zesílit. Při tom je třeba dbát na dostatečný odstup signálu od šumu senzoru a zesilovače a též od parazitních rušivých signálů působících na senzor, případně i na zesilovač. Další zpracování signálu je řešeno buď analogovými obvody, nebo digitalizací. Analogový výstup měřícího řetězce se realizuje například voltmetrem, blokem pro přenos signálu, případně blokem zajišťujícím unifikaci analogového signálu, případně slouží k přímé akci v nějakém zapojení atd.

7
Aby se předešlo problémům u analogových snímačů a pro lepší spolupráci zařízení byly stanoveny normy na hodnoty výstupních napětí a proudů tzv. unifikované signály: napěťové signály určené přednostně pro přenos uvnitř částí : unipolární napětí: V, bipolární napětí: -10 až +10 V (např. RS 232)
")
8
proudové signály určené přednostně pro dálkový přenos :
proud 0 – 5 mA, proud 4 – 20 mA, proud mA (do zarušených provozů), proud mA (pro velmi těžké provozy, kde je silné zarušení signálů) Při číslicovém zpracování signálu se s výhodou používají signální procesory zajišťující řadu speciálních operací, případně slouží k přímé akci v nějakém zapojení s procesorovou technikou atd.
, proud mA (pro velmi těžké provozy, kde je silné zarušení signálů) Při číslicovém zpracování signálu se s výhodou používají signální procesory zajišťující řadu speciálních operací, případně slouží k přímé akci v nějakém zapojení s procesorovou technikou atd.")
9
Technické parametry senzorů
citlivost je ideální statická charakteristika, kde y = K . x, kde K je konstantou přenosové funkce a současně citlivost, práh citlivosti je dán hodnotou snímané veličiny, při níž je na výstupu senzoru signál odpovídající střední kvadratické odchylce šumu senzoru, dynamický rozsah je dán intervalem přípustných hodnot snímané fyzikální veličiny, ohraničené prahem citlivosti a maximální hodnotou měřené veličiny, reprodukovatelnost - dána odchylkou naměřených hodnot při krátkodobém časovém sledu měření neměnné vstupní veličiny a neměnných rušivých vlivů okolí,

10
rozlišitelnost je nejmenší změna snímané veličiny odpovídající absolutní nebo relativní chybě senzoru, aditivní chyba je způsobená posunem jmenovité lineární charakteristiky, multiplikativní chyba je ekvivalentní změna citlivosti senzoru, která je: závislá na hodnotě měřené veličiny, změna sklonu statické charakteristiky, chyba linearity je dána odchylkou od ideální lineární charakteristiky,

11
dynamické vlastnosti senzorů, které je nezbytné znát pro analýzu a syntézu měřících a regulačních obvodů, parametry časové odezvy časová konstanta, šíře frekvenčního pásma, frekvenční rozsah, rychlost číslicového přenosu, parametry šumu aj.

12
Vlastnosti senzorů Vlastnosti senzorů jsou:
statická charakteristika popisuje chování v ustáleném stavu, dynamická charakteristika popisuje chování při rychlých změnách měřené veličiny, linearita je odchylka skutečné charakteristiky od ideální (přímkové), přesnost je vlastnost charakterizující přesnost konverze snímaného signálu.
, přesnost je vlastnost charakterizující přesnost konverze snímaného signálu.")
13
Inteligentní senzory Inteligentní senzor je senzor, který obsahuje obvody pro zpracování a analýzu signálu v jediném kompaktním provedení včetně citlivé částí senzoru. Proto vznikají nové typy senzorů u nichž je integrace měřícího řetězce umístěna na jediném čipu obvodu.

14
Inteligentní senzory se skládají ze:
vstupní části, což je převod fyzikální, chemické, či jiné veličiny na elektrickou, která má za úkol : zesílení a filtrace signálu, linearizace charakteristiky, normování signálu, přepínání více vstupních veličin s adresami v řadě, ve smyčce atd. ochranu proti nežádoucímu působení parazitních veličin vnitřní části, která realizuje A/D převod, autokalibraci, číslicovou linearizaci, aritmetické operace, autodiagnostiku, statické vyhodnocování naměřených dat atd. a to přes rozhraní řídící dálkově ovládané rozsahy

15
výstupní část unifikuje analogové výstupní signály a realizuje :
komunikaci prostřednictvím integrovaného rozhraní se sběrnicovým systémem, výkonově binárními výstupy, A/D převodem

16
Skladba inteligentního integrovaného senzoru

17
Inteligentní senzorový modul
Vývoj a výroba inteligentních senzorů se začíná zavádět, protože se značná část běžných senzorů při automatizovaném zpracování dat připojuje přes tzv. inteligentní senzorové moduly. Tyto moduly vytvářejí při připojení senzorů funkční ekvivalenty inteligentních senzorů na nejvyšší úrovni. Mají více přepínatelných vstupů, programovatelné zesílení zesilovačů a jsou vybaveny standardizovaným rozhraním. Na výše uvedeném obrázku je uvedeno čidlo senzoru, ale těchto čidel včetně dalších obvodů až na mikropočítač tam může být více.

18
Inteligentní integrovaný systém s mikrokontrolerem

19
Snímače polohy

20
Odporové snímače polohy
Odporové snímače lze rozdělit : podle tvaru dráhy na : lineární profilové podle pohybu jezdce na posuvné rotační jednootáčkové rotační víceotáčkové (ARIPOT)
")
21
nekovové podle použitého materiálu odporové dráhy na : kovové drátové
vrstvové nekovové uhlíkové cermetové elekrovodivé plasty

22
Jejich nejdůležitější obecné vlastnosti jsou :
Rozlišovací schopnost, která udává minimální velikost či úhel, který je schopen potenciometr ještě spolehlivě rozlišit. Nejvyšší rozlišní mají vrstvové potenciometry a to až 0.01% ale zase mají nízkou životnost. U vinutých jednootáčkových (270°, 360°) či víceotáčkových (až 10 otáček z čehož vyplývá až 3600°) potenciometrů (Aripotů) se jedná vlastně o změnu danou skokem mezi 2 sousedními závity. Linearita je největší odchylka výstupního napětí od dané vztažné přímky a je dána v % napájecího napětí.
 či víceotáčkových (až 10 otáček z čehož vyplývá až 3600°) potenciometrů (Aripotů) se jedná vlastně o změnu danou skokem mezi 2 sousedními závity. Linearita je největší odchylka výstupního napětí od dané vztažné přímky a je dána v % napájecího napětí.")
23
Životnost, která ke dána jako počet posuvů u posuvných potenciometrů (cca 106), nebo počet otočení hřídelkou (107) při zadaných provozních podmínkách. Provozní moment či provozní kroutící moment, v obou směrech pro rovnoměrný pohyb v celém mechanickém rozsahu při zadané rychlosti. Teplotní koeficient odporů, který je stanoven na základě změny při změně teploty o 1° C oproti vztažné teplotě a který se vypočítá z následujících vztahů : α = (R100 – R0)/R0.Δt Rt = R0 + α.t kde α je teplotní koeficient odporu a Rt výsledný odpor v závislosti na teplotě.
/R0.Δt Rt = R0 + α.t. kde α je teplotní koeficient odporu a Rt výsledný odpor v závislosti na teplotě.")
24
Šum, který vzniká při pohybu jezdce je způsoben jak mechanickými, tak i elektrickými efekty jako je mikroskopické poskakování jezdce. Pro snímání se používá buď měření proudu či napětí. Měření napětí je často používaná metoda měření napětí, která má již v principu však problém s linearitou. To vyplývá z průběhu zatíženého děliče, kdy se uplatňuje velikost zátěže a platí, úměra – čím větší zátěž, tím větší nelinearita.

25
Princip odporového snímání polohy Linearita v závislosti na zatížení

26
RC = R1 + R2 , při čemž R1 = (1- α).RC a R2 = α.RC
Pokud se položí absolutní poloha jezdce α = x/xmax kde x je absolutní poloha jezdce a dále RC = R1 + R2 , při čemž R1 = (1- α).RC a R2 = α.RC kde RC je celkový odpor, při čemž činitel zatížení z = RZ/RC Pak pro tuto závislost platí:
.RC a R2 = α.RC. kde RC je celkový odpor, při čemž činitel zatížení. z = RZ/RC. Pak pro tuto závislost platí:")
27
Kapacitní snímače polohy
Principem kapacitního snímače polohy je změna buď vzdálenosti mezi elektrodami vzduchového kondenzátoru, nebo změna tloušťky či druhu dielektrika. Tyto změny se projeví jako změna kapacity kondenzátoru. Tyto snímače tedy převádějí měřenou veličinu na kapacitu kondenzátoru, která je následně převedena na zpracovatelný spojitý či nespojitý signál. Jejich použití je hlavně v oblasti nekovových a nevodivých předmětů jako jsou papír, plast, olej, granulát, prášek, aj.

28
Kapacita snímačů bývá jednotky až stovky pF a je srovnatelná se kapacitou kabelu. Proto nezbytnou podmínkou pro správnou činnost snímačů je minimalizace parazitních kapacit, což lze většinou eliminovat zkrácením přívodů k měřícímu členu nebo použitím integrovaného převodníku.

29
Princip kapacitního snímače polohy
Kapacita kondenzátoru je C = ε.S/l kde S je plocha elektrod v m2 , ε permeabilita dielektrika (v tomto případě materiálu) ve F/m l vzdálenost elektrod v m
 ve F/m. l vzdálenost elektrod v m.")
30
měření tloušťky materiálu deskový s proměnnou plochou
měření tloušťky materiálu deskový s proměnnou plochou válcový s proměnnou plochou Při použití střídavého napájení 50Hz vychází reaktance snímače řádově na desítky MΩ, což vede na použití vysoce citlivých vyhodnocovacích obvodů. Z tohoto důvodu je třeba volit frekvence minimálně v jednotkách kHz.

31
Průmyslové kapacitní snímače (vpravo snímače s dosahem do 5 mm)
")
32
Transformátorový můstek Kapacitní senzor ve zpětné
vazbě zesilovače

35
Pro vyhodnocení polohy kapacitních snímačů polohy se používají:
můstkové metody, kdy je měřící kondenzátor zapojen do jedné z větví střídavého můstku. Jsou ale nepřesné, takže z nich je nejvýhodnější transformátorový můstek, který je automaticky vyvažovaný, díky čemuž lze parazitní kapacitu potlačit. zpětnovazební obvody, kde je měřící kondenzátor prvkem děliče zapojeného do zpětné vazby operačního zesilovače. Tento způsob zapojení je vhodný pro rozdílové senzory. Díky tomuto zapojení, kdy je zde potlačen vliv parazitních přívodů snímače k operačnímu zesilovači, je průběh výstupního napětí lineární.

36
rezonanční metody, při nichž je měřící kondenzátor součástí LC obvodu a kapacita se převádí na kmitočet oscilátoru. Snímač pracuje tak, že obsahuje 2 elektrody a v okamžiku, kdy se objeví předmět před aktivní plochou měřícího kondenzátoru změní se kapacita. Změna kapacity v obvodu vyvolá následně změnu frekvence LC oscilátoru. Pokud je správně zvolena šíře rezonanční křivky, pak lze volit pracovní oblast snímače tak, aby měl odpovídající citlivost a linearitu.

37
Indukční snímače polohy

38
Při čemž vlastní měřící prvek může působit:
Princip činnosti indukčních snímačů polohy je založen na tom, že se změnou polohy se změní vlastní indukčnost L (tlumivkové snímače) či vzájemná indukčnost M dvou cívek (transformátorové snímače). Indukční senzory tvoří rozsáhlou skupinu senzorů polohy, posunutí, úhlu natočení, otáček, síly, zrychlení atd. Snímací prvky bývají v provedení: jednoduchém, diferenciálním Při čemž vlastní měřící prvek může působit: na vstupu do cívky, na jádro
 či vzájemná indukčnost M dvou cívek (transformátorové snímače). Indukční senzory tvoří rozsáhlou skupinu senzorů polohy, posunutí, úhlu natočení, otáček, síly, zrychlení atd. Snímací prvky bývají v provedení: jednoduchém, diferenciálním. Při čemž vlastní měřící prvek může působit: na vstupu do cívky, na jádro.")
39
Tyto snímače se dělí na snímače:
s uzavřeným magnetickým polem, které se dále dělí na: tlumivkové, jsou pasivní senzory měnící své vlastní indukčnost cívky v závislosti na poloze snímaného předmětu. Ty se dále dělí podle veličiny, která ovlivňuje indukčnost a to na: s proměnnou délkou vzduchové mezery, s proměnnou plochou vzduchové mezery, s proměnnou permeabilitou. transformátorové. s otevřeným magnetickým polem, s potlačeným magnetickým polem, bez feromagnetika.

40
Obvod obsahuje složky: R (odpor vinutí),
L (indukčnost) a C (mezizávitová kapacita). Při frekvencích od 5 do 50 kHz platí, že ωL ~ R až 10R. Z toho vyplývá, že měřený údaj je závislý na frekvenci, takže je třeba, aby frekvence napájecího napětí byla asi 10x větší než frekvence měřené veličiny. Další omezení je takové, že se zvyšující se frekvencí se zhoršuje důležitý činitel jakosti Q.
 a. C (mezizávitová kapacita). Při frekvencích od 5 do 50 kHz platí, že ωL ~ R až 10R. Z toho vyplývá, že měřený údaj je závislý na frekvenci, takže je třeba, aby frekvence napájecího napětí byla asi 10x větší než frekvence měřené veličiny. Další omezení je takové, že se zvyšující se frekvencí se zhoršuje důležitý činitel jakosti Q.")
41
Průmyslové indukční snímače (napravo snímače až s dosahem 40 mm)
")
42
Indukční snímače polohy s proměnnou délkou vzduchové mezery
Pokud se zanedbá odpor feromagnetika, pak pro indukčnost platí vztah : L = (N2.μ0.S)/2.d Indukční snímač s proměnnou vzduchovou mezerou a průběhem indukčnosti L
/2.d. Indukční snímač s proměnnou vzduchovou mezerou a průběhem indukčnosti L.")
43
Při rozdílovém zapojení snímače změny Δd vyvolají změnu ΔL s opačnými znaménky. Z toho vyplývá, že zapojení má jednak dvojnásobnou velikost a současně není tak nelineární. Rozdílový indukční snímač s proměnnou vzduchovou mezerou a průběhem indukčnosti L

44
Indukční snímače polohy s proměnnou plochou vzduchové mezery
Tyto snímače se používají při předpokládaném měření středních posunů, Dostatečná linearita se dosahuje při posuvech Δx a velikosti mezery d menších než je šířka mezery hlavně v rozdílovém zapojení snímače, pro jednoduché zapojení pak musí platit Δx << b současně d << b Indukční snímač s proměnnou plochou a průběhem indukčnosti L

45
V průmyslových aplikacích je to běžně používaný snímač jehož princip činnosti spočívá v rozlaďování oscilátoru, což se děje přiblížením feromagnetického materiálu k čelu cívky. LC obvod po přivedení napájení kmitá a je vytvořeno vysokofrekvenční elektromagnetické pole. Toto pole je vyzařováno feritovým jádrem do osy snímače.

46
Při přiblížení kovového předmětu k čelu cívky se v něm indukují vířivé proudy tlumící kmitání obvodu. Tím dojde k rozladění oscilátoru. Výstupní signál je přiveden na vstup komparátoru, který porovná prahovou hodnotu napětí s hodnotou na svém vstupu a v případě přítomnosti předmětu překlopí klopný obvod. Výstupní impuls se nakonec zesílí a natvaruje. Na výstupu je pak tomu odpovídající logická proměnná odpovídající stavu zaclonění.

47
Parametrem tohoto snímače je spínací vzdálenost definovaná jako kolmá vzdálenost snímaného předmětu od aktivní plochy snímače při které dojde k sepnutí. Vyhodnocování údajů indukčnostních snímačů je možné následujícími způsoby: rezonančním obvodem, můstkovým zapojení, přímým měřením.

48
Transformátorové indukční snímače polohy
Velmi častým uspořádáním je otevřený magnetický obvod s posuvným jádrem a sekundárními vinutími zapojenými jako rozdílové (napětí se odečítají). Magnetická vazba mezi primárním a sekundárními vinutími je závislá na poloze jádra jenž je spojeno s odměřovaným zařízením. Vzájemná indukčnost cívek je definována obdobně jako vlastní indukčnost L, jako podíl části magnetického toku Φ12 (Φ21) vytvořeného jednou cívkou procházejícího druhou cívkou a proudu jehož průchodem prvou (druhou) se generuje magnetický tok. Pak platí: M = Φ12/I1 = Φ21/I2
. Magnetická vazba mezi primárním a sekundárními vinutími je závislá na poloze jádra jenž je spojeno s odměřovaným zařízením. Vzájemná indukčnost cívek je definována obdobně jako vlastní indukčnost L, jako podíl části magnetického toku Φ12 (Φ21) vytvořeného jednou cívkou procházejícího druhou cívkou a proudu jehož průchodem prvou (druhou) se generuje magnetický tok. Pak platí: M = Φ12/I1 = Φ21/I2.")
49
Snímače s cívkou kde je otevřený magnetický obvod využívají změny indukčnosti cívky v závislosti na poloze feromagnetického jádra. Jsou-li v jednoduchém zapojení, pak mají malou přesnost a velkou nelinearitu. V rozdílovém zapojení jsou jejich vlastnosti podstatně lepší a proto se výhradně konstruují jako rozdílové vyhodnocující změnu vzájemné indukčnosti mezi primární a sekundárními cívkami. Primární cívka je napájena ze zdroje střídavého napětí, takže výstupní napětí sekundárního vinutí je úměrné měřené veličině a jejich přesnost včetně nelinearity je asi 1%.

50
Transformátorový indukční snímač v rozdílovém zapojení

51
Induktosyn Pokud je potřeba měření větších změn polohy, pak se většinou používají transformátorové snímače pracující na principu využívajícím měření fázového posuvu dvou elektrických signálů. Řešení vyplývá z toho, že pokud jsou primární vinutí mechanicky posunutá jsou napájena navzájem posunutými střídavými napětími. Pak fázový posuv indukovaného sekundárního napětí oproti jednomu z primárních napětí je rovno mechanickému posuvu. Pro lineární měření se používá indukrosyn, pro rotační pak revolver.

52
Induktosyn se skládá z pohyblivého jezdce umístěného nad pevným měřítkem. Předem je nezbytné upozornit na to, že mezera mezi oběma vinutími musí být v celém rozsahu měření zcela konstantní (cca 0.1 mm). Jezdec má na svém povrchu 2 meandrovitá vinutí, která jsou oproti sobě posunutá o násobek 1,25λ (λ je délka jednoho meandru). Při překrývání meandru je indukované napětí maximální. Při posuvu o délku λ/4 je výsledné napětí nulové. Při posuvu o λ/2 se vinutí zase překrývají a výsledné napětí je opět maximální, tentokrát však s obrácenou fází.
. Jezdec má na svém povrchu 2 meandrovitá vinutí, která jsou oproti sobě posunutá o násobek 1,25λ (λ je délka jednoho meandru). Při překrývání meandru je indukované napětí maximální. Při posuvu o délku λ/4 je výsledné napětí nulové. Při posuvu o λ/2 se vinutí zase překrývají a výsledné napětí je opět maximální, tentokrát však s obrácenou fází..")
53
Pokud se na vinutí přivedou dvě sinusová napětí, posunutá o ¼ periody, pak se v sekundárním vinutí indukuje napětí, pro které platí: Uv = A.cos(ωt – φ) Pokud se přiřadí délce kroku úhel 2π, pak je posuv Δx převeden na vyhodnocení fázového posuvu φ. Je výhodné měřit délku intervalu průchody přes napěťovou nulu, neb při kroku 2 mm a přesnosti odměřování 1μm je úhlové rozlišení pouhých 10.8’’. Aby to bylo možné, používá se nesinusové napájení (často se jedná o trojúhelníkový průběh), což umožňuje vyhodnocování podle posunu náběžné hrany indukovaného napětí oproti jednomu z primárních napětí.
 Pokud se přiřadí délce kroku úhel 2π, pak je posuv Δx převeden na vyhodnocení fázového posuvu φ. Je výhodné měřit délku intervalu průchody přes napěťovou nulu, neb při kroku 2 mm a přesnosti odměřování 1μm je úhlové rozlišení pouhých 10.8’’. Aby to bylo možné, používá se nesinusové napájení (často se jedná o trojúhelníkový průběh), což umožňuje vyhodnocování podle posunu náběžné hrany indukovaného napětí oproti jednomu z primárních napětí.")
54
Selsyny a resolvery Selsyny se používají pro vyhodnocení úhlu natočení a pracují na principu polohového transformátoru. Jsou konstruovány podobně jako vícefázové motory. Skládají se ze statoru, který je třífázový a rotoru který je jednofázový a vinutí je vyvedeno přes kartáčky a kroužky. Selsyny se používají vždy ve dvojicích (vysílač a přijímač) a to ve dvou zapojeních jako:
 a to ve dvou zapojeních jako:")
55
přenášeč výchylky. Zde jsou statory vysílače i přijímače propojeny
přenášeč výchylky. Zde jsou statory vysílače i přijímače propojeny. Zrovna tak jsou propojeny rotory selsynů, které jsou však ze společného zdroje střídavého napětí. Pokud se rotor vysílače natočí o určitý úhel, indukují se proudy ve statoru vysílače a vytvoří magnetické pole ve statoru přijímače. Rotor přijímače se pak natočí o stejný úhel jako rotor vysílače. Tento systém je však nevhodný pro přenos větších momentů! Při nezatíženém výstupním rotoru je přesnost přenosu lepší než ±1%. zdroj napětí odebíraného z kartáčů přijímače Pro toto napětí platí Uv = Un.cosβ, kde β je úhel vysílače rotoru vůči zablokovanému rotoru

56
Přenášeč výchylky Zdroj napětí Uv = Un.cosβ

57
Resolver je zařízení, které snímá natočení rotoru a umožňuje přenášet tuto informaci na dálku. Používá se tam, kde není možné odečítat hodnoty na místě. Na druhém konci je buď stejné zařízení, na kterém lze odečítat polohu rotoru, nebo elektronické zařízení převádějící signál z resolveru na údaj o poloze. Obvykle se používá pro měření dvoufázové vedení. Je tvořen primárním vinutím, rotorem, který je buzen střídavým proudem k vytvoření proměnlivého magnetického pole a sekundárním vinutím, jež tvoří dvě cívky navzájem kolmé. V nich se vlivem otáčení rotoru indukuje napětí fázově posunuté o 90°. Resolver neobsahuje polovodičové prvky a je odolný účinkům záření.

58
Ukázka resolveru včetně principu

59
Indukční snímače polohy s otevřeným magnetickým obvodem
Princip spočívá ve změně indukčnosti vzduchové cívky v závislosti na poloze feromagnetického jádra, které spojeno s odměřovaným předmětem. Snímač opět je většinou realizován v rozdílovém uspořádání s průběhem intenzity magnetického pole v ose cívky v závislosti na poloze jádra. Velkou výhodou je možnost použití tohoto snímače pro měření velkých změn polohy, což je jeho klad. Záporem je menší citlivost, nárok na perfektní provedení cívek a vysoký počet závitů a z toho vyplývající parazitní kapacita. Pro frekvence do 104 Hz a relativně malou vzduchovou mezeru platí přibližně hyperbolická závislost.

60
Při konstatním napětí a frekvenci zdroje je průběh proudu i cívky v závislosti na velikosti vzduchové mezery v určité oblasti okolo středové polohy téměř lineárni a pro měření tedy nejvhodnější. Lineární úsek bývá v oblasti 0,1 až 0,15. Tímto jednoduchým snímačem lze zjišťovat změny polohy kotvičky s přesností na zlomky milimetru. Snímač umožňuje nejen měření polohy, ale i měření tlaku, geometrických rozměrů, otáček apod. Nevýhodou je to, že velikost proudu je teplotně závislá a že kotvička působí při různém zdvihu různě velké přitažlivé síly.

61
Principielní zapojení jednoduchého snímače s otevřeným mg
Principielní zapojení jednoduchého snímače s otevřeným mg. obvodem (vlevo), v rozdílovém zapojení (vpravo) a průběh indukčnosti jednoduchého systému
, v rozdílovém zapojení (vpravo) a průběh indukčnosti jednoduchého systému.")
62
Indukční snímače polohy s potlačeným magnetickým polem
Princip spočívá v tom, že pokud se vloží elektricky vodivý materiál a magneticky nevodivý materiál (např. Al) do vysokofrekvenčního magnetického pole s intenzitou HSN, pak se v něm indukují vířivé proudy, které vybudí magnetické pole s intenzitou HVÍŘ. Směr je dán Lenzovým zákonem, což je směr opačný oproti směru intenzity pole budící cívky. Po přivedení napájení začne obvod LC kmitat. V okamžiku elektricky vodivého materiálu k čelu cívky se díky vířivým proudům a díky tomu vzniku druhému elektromagnetickému poli zmenší tok Φ, čímž se indukčnost budící cívky sníží a kmitání obvodu LC utlumí.
 do vysokofrekvenčního magnetického pole s intenzitou HSN, pak se v něm indukují vířivé proudy, které vybudí magnetické pole s intenzitou HVÍŘ. Směr je dán Lenzovým zákonem, což je směr opačný oproti směru intenzity pole budící cívky. Po přivedení napájení začne obvod LC kmitat. V okamžiku elektricky vodivého materiálu k čelu cívky se díky vířivým proudům a díky tomu vzniku druhému elektromagnetickému poli zmenší tok Φ, čímž se indukčnost budící cívky sníží a kmitání obvodu LC utlumí.")
63
Signál je přiveden na komparátor a v případě je-li v jeho dosahu vhodný předmět překlopí výstupní klopný obvod. Z toho vyplývá, že je tento snímač vhodný pro dvoupolohovou indikaci. Dosah tohoto snímače je asi 50 mm.

64
Indukční snímače polohy bez feromagnetika
Pro jednoduché zapojení jsou potřeba dvě vzduchové cívky, které se pohybují v ose. Pro rozdílové zapojení jsou potřeba tři cívky, kde jsou dvě krajní na pevných místech a prostřední cívka je pohyblivá. Činnost je založena na principu transformátoru, což znamená indukce napětí pomocí magnetické vazby dvou obvodů a to bez jakékoliv feromagnetické části. Díky tomu, že zde žádná taková část není, pak odpadají veškeré parazitní vlivy spojené s feromagnetickým materiálem. Pokud platí, že: ωL1 >> R1, RZ >> ωL2 >> R2 pak platí : I1 = u1/jωL1 a I2 = u2/RZ

65
u2 = χ.(L1/L2)-1/2 kde χ je činitel vazby
a výstupní napětí u2 = χ.(L1/L2)-1/ kde χ je činitel vazby Buzené pohyblivé vinutí má označení u0. Jednoduchá realizace snímače pak výstup u2, kdežto rozdílový snímač výstupy u1 a u2, které jsou zapojeny proti sobě. Princip jednoduchého (vlevo) a rozdílového indukčního snímače (vpravo) bez feromagnetika
-1/2 kde χ je činitel vazby. Buzené pohyblivé vinutí má označení u0. Jednoduchá realizace snímače pak výstup u2, kdežto rozdílový snímač výstupy u1 a u2, které jsou zapojeny proti sobě. Princip jednoduchého (vlevo) a rozdílového indukčního snímače (vpravo) bez feromagnetika.")
66
Indukční snímače polohy či rychlosti založené na Faradayově zákoně
Jsou to senzory založené na Faradayově zákoně: Ui = -N.(dΦ/dt) Přes feromagnetické tělísko se uzavírá magnetický tok vyvolaný permanentním magnetem. Pohybem feromagnetického tělíska dochází ke změnám magnetického toku. Ve snímací cívce se naindukuje napětí úměrné těmto změnám. Tyto indukční snímače jsou aktivní.
 Přes feromagnetické tělísko se uzavírá magnetický tok vyvolaný permanentním magnetem. Pohybem feromagnetického tělíska dochází ke změnám magnetického toku. Ve snímací cívce se naindukuje napětí úměrné těmto změnám. Tyto indukční snímače jsou aktivní.")
67
Elektromagnetické snímače polohy či rychlosti
Elektromagnetické snímače vyhodnocují změnu magnetického toku změnou impedance magnetického obvodu. Konstrukce takovéhoto snímače je provedena tak, že na permanentním magnetu je navinuta cívka. Pokud se v magnetickém poli tohoto snímače pohybuje feromagnetický předmět spojený s odměřovaným předmětem, pak je napětí indukované v cívce dáno časovou změnou toku Φ. Této změně pak odpovídá amplituda výstupního napětí. Tímto snímačem lze výhodně měřit též rychlost i zrychlení.

68
Elektromagnetický aktivní snímač

69
Elektrodynamické snímače polohy či rychlosti
Elektromagnetické dynamické snímače využívají pohyb vodiče v magnetickém poli díky čemuž vzniká napětí Uind. Platí následující známý vzorec : Uind = B.l.v

70
Optické snímače Optické snímače mají oproti řadě senzorů tu výhodu, že jsou necitlivé na elektromagnetická pole, jsou galvanicky oddělené a není zde obava z takovýchto rušivých vlivů. Jako zdroj záření se používají emisní nebo laserové diody a jako snímače fotodiody, fototranzistory, optrony či CCD snímače. Mohou se bezpečně používat v nebezpečných prostředích jako jsou prostory s hořlavými nebo výbušnými látkami. Tyto snímače se dále dělí zásadně na : snímače pro měření polohy absolutní inkrementální (přírůstkové)
")
71
snímače pro indikaci polohy lze dále rozdělit na :
přijímače cizího záření bez vlastního vysílače jednocestné světelné závory: světelná závora s odděleným zdrojem a přijímačem záření světelná záclona, pracující s jedním zdrojem a přijímačem záření, mezi nimi je soustavou zrcadel vytvořena síť paprsků světelná mříž, sestavená z několika sériových světelných závor

72
reflexní světelné závory
reflexní světelná mříž reflexní světelná záclona reflexní světelné snímače

73
Základní pojmy K této problematice se váže řada definic, která bude platná i pro řadu dalších snímačů: Bezpečnostní světelná závora - je celek tvořený vysílačem a přijímačem, který používá 2 nebo více paprsků. Je určena na rozpoznání například lidského těla, ruky nebo prstů. Rozlišení - nebo rozpoznávací schopnosti bezpečnostní světelné závory se definuje nejmenší možný průměr předmětu, který bezpečnostní světelná závora s jistotou rozpozná. Takže, když je rozlišení bezpečnostní světelné závory například 14 mm, rozpozná předmět, jehož průměr je nejméně 14 mm. Doba odezvy - je doba, která uběhne od přerušení světelného paprsku do vypnutí bezpečnostního výstupu.

74
EDM (External Device Monitoring) je monitorování připojených vnějších zařízení. Lze hlídat např. činnost stykačů nebo relé, které nemají vlastní kontrolu. OSSD (Output Signal Switching device) je bezpečnostní výstup. U některých světelných závor se jako bezpečnostní výstupy používají bezpečnostní tranzistory PNP. Muting (přerušeni, utlumeni, pasivace) - funkce muting znamená dočasné „přerušeni“ bezpečnostní světelné závory, aby předmět (například balík) mohl projít na dopravníku skrz bezpečnostní světelnou závoru bez zastavení stroje, ale když se člověk pokusí projít skrz světelnou závoru, vypnou se bezpečnostní výstupy a nebezpečné pohyby stroje se zastaví. Funkce muting se aktivuje pomoci zvláštních čidel, které jsou často fotoelektrické snímače používající odrazku.
 je bezpečnostní výstup. U některých světelných závor se jako bezpečnostní výstupy používají bezpečnostní tranzistory PNP. Muting (přerušeni, utlumeni, pasivace) - funkce muting znamená dočasné „přerušeni bezpečnostní světelné závory, aby předmět (například balík) mohl projít na dopravníku skrz bezpečnostní světelnou závoru bez zastavení stroje, ale když se člověk pokusí projít skrz světelnou závoru, vypnou se bezpečnostní výstupy a nebezpečné pohyby stroje se zastaví. Funkce muting se aktivuje pomoci zvláštních čidel, které jsou často fotoelektrické snímače používající odrazku.")
75
Difuzní snímač SMP - snímá odrazem od předmětu do 50cm ( bílý papír ) s velmi malou optickou hysterezí a úzkým paprskem. Dosah se liší podle vlastností snímaného předmětu. Závora s odrazkou - vybavení je jako u SMP, dosah 2m bez difuze (-), nebo 3m s difuzí 15cm (+). Toto provedení není vhodné pro prašné nebo mokré provozy pro snadné znečistění odrazky. Zesilovač pro světlovodné kabely - vybavení jako u SMP, použití podle typu světlovodného kabelu, závorové nebo difuzní, zejména pro snímání velmi malých předmětů, nebo pro snímání ve vysokých teplotách. Optická hystereze - rozdíl vzdálenosti při sepnutí SMP a jeho rozepnutí (obr. 3.23) při oddalování předmětu je udaná v procentech dosahu. Paralelní odstup - rozptyl paprsku – snadné směrování, ale také možnost vzájemného ovlivnění při paralelním chodu více paprsků.
, nebo 3m s difuzí 15cm (+). Toto provedení není vhodné pro prašné nebo mokré provozy pro snadné znečistění odrazky. Zesilovač pro světlovodné kabely - vybavení jako u SMP, použití podle typu světlovodného kabelu, závorové nebo difuzní, zejména pro snímání velmi malých předmětů, nebo pro snímání ve vysokých teplotách. Optická hystereze - rozdíl vzdálenosti při sepnutí SMP a jeho rozepnutí (obr. 3.23) při oddalování předmětu je udaná v procentech dosahu. Paralelní odstup - rozptyl paprsku – snadné směrování, ale také možnost vzájemného ovlivnění při paralelním chodu více paprsků.")
76
Průběh paralelního odstupu a hystereze

77
Přijímače cizího záření bez vlastního vysílače
Přijímače cizího záření bez vlastního vysílače jsou jednocestné světelné závory. Jako přijímače cizího záření bez vlastního vysílače mohou sloužit fotorezistory, fotodiody, fototranzistory aj. Rozlišují jen zda na snímací prvek dopadá cizí záření, či je toto záření zacloněno či vypnuto.

78
Světelná závora s odděleným zdrojem a přijímačem záření
Jednocestná závora (též bezpečnostní fotoelektrický snímač) se skládá z vysílače a přijímače. Vysílač je uspořádán tak, aby na přijímač dopadalo co nejvíce světelného záření. Přijímač detekuje dopadající záření a odlišuje od světla dopadajícího z okolí. Vysílačem je zde emisní nebo laserová dioda vyzařující ve viditelné nebo infračervené oblasti. Přijímačem bývá fotodioda, fototranzistor, optron aj.
 se skládá z vysílače a přijímače. Vysílač je uspořádán tak, aby na přijímač dopadalo co nejvíce světelného záření. Přijímač detekuje dopadající záření a odlišuje od světla dopadajícího z okolí. Vysílačem je zde emisní nebo laserová dioda vyzařující ve viditelné nebo infračervené oblasti. Přijímačem bývá fotodioda, fototranzistor, optron aj.")
79
(obrázky z dokumentace firmy Datalogic)
Různé světelné závory (obrázky z dokumentace firmy Datalogic)
")
80
Takovýchto světelných závor však v průmyslu existuje velké množství, což je zobrazeno na řadě následujících obrázků.

81
Různá povedení světelných závor
(obrázky z dokumentace firmy Datalogic)
")
82
Taková vícenásobná závora nebo též bezpečnostní světelné závory, kde jsou v jednom každém stojanu jak vysílače, tak i přijímače, nebo v jednom stojanu jsou vysílače a v druhém přijímače je na obrázku.

83
Tyto závory mají různé provedení a chrání podle velikosti průniku například prstu, ruky nebo člověka. Takže mezi vysílačem a přijímačem je vytvořena hustá síť rovnoběžných paprsků, které vytvářejí měřicí clonu. Detekovaný předmět se umisťuje mezi tyto závory. Předmět svým tvarem přerušuje určitý počet paprsků při čemž poskytuje obraz detekovaného předmětu, resp. jeho rozměry. Při použití dvou těchto snímačů umístěných navzájem kolmo je možno stanovit profil procházejícího výrobku. Snímač je vhodný po detekci profilů, tvarů a rozměrů procházejících předmětů.

84
Jako další hojně používané průmyslové snímače jsou tzv
Jako další hojně používané průmyslové snímače jsou tzv. vidlicové snímače

85
Princip detekce směru jízdy
Použití takovýchto snímačů je možné ukázat na obrázku, kdy je pomocí 2 snímačů možno rozlišit směr pohybu například modelu. Směr pohybu závisí na pořadí přerušení světelných paprsků S1 a S2. Princip detekce směru jízdy

86
Světelná záclona Světelnou záclonu dostaneme tak, že záření od vysílače se vede pomocí soustavy zrcadel po různých drahách k přijímači. Na druhém obrázku je pak aplikace.

87
Světelná mříž Seřazením několika jednocestných závor nad sebou a jejich logickým propojením se realizuje optická mříž, hlídající celou plochu mezi vysílací a přijímací stranou.

88
Vláknová optika Slouží pro snímání buď drobných součástí jak je ukázáno na následujícím obrázku, nebo se používá v těžkých podmínkách jako jsou vysoké teploty či agresivní prostředí (až 300° C nebo práce s kyselinami a jejich výpary), kde nemůže být přímo elektronika. Tím však není omezeno snímání materiálů s mnohem vyšší teplotou - u 2m dlouhých kabelů je dosah ještě 5m a vyšší teplotu lze tedy eliminovat polohou. Světlovodné kabely jsou určeny pro závorové nebo difuzní (odraz od snímaného předmětu) snímání. Adapterem se našroubují na vysílače LT a přijímače LR.
, kde nemůže být přímo elektronika. Tím však není omezeno snímání materiálů s mnohem vyšší teplotou - u 2m dlouhých kabelů je dosah ještě 5m a vyšší teplotu lze tedy eliminovat polohou. Světlovodné kabely jsou určeny pro závorové nebo difuzní (odraz od snímaného předmětu) snímání. Adapterem se našroubují na vysílače LT a přijímače LR.")
90
Snímače jsou konstruovány tak, že vysílací dioda a snímací a vyhodnocovací elektronika jsou umístěny v pouzdře, z něhož je optický signál vyveden optickým vláknem k místu detekce. Vlákna se používají skleněná nebo plastová, jsou opatřena optikou a jsou chráněna několika druhy plášťování. Velice široký sortiment optických kabelů, výběr příslušenství a skutečně miniaturní rozměry dovolují použití těchto snímačů v těch nejnáročnějších aplikacích včetně výroby jemné mechaniky, elektroniky a optiky. Snímač může být použit k detekci správné polohy stejných objektů na páse, snímací poloha je nastavena na určitou zvolenou vzdálenost od snímače a jsou detekovány pouze objekty v této vzdálenosti.

91
Reflexní systémy Zdroj i přijímač světla jsou umístěny v jedné jednotce. Na opačné straně je umístěno zrcadlo. Používá se zde tzv. trojzrcadlo, které zajistí zpětný odraz i při provozních změnách vzájemné polohy vysílače a zrcadla.

92
Difusní snímače Vysílač i přijímač světelného paprsku je ve společném pouzdře, přítomnost předmětu je detekována odrazem paprsku od jeho povrchu. Používají se v balicích linkách, lahvárenských linkách a plničkách), v obráběcích strojích k detekci nástroje v zásobníku a v řadě dalších aplikací.
, v obráběcích strojích k detekci nástroje v zásobníku a v řadě dalších aplikací.")
93
Mohou být použity pro detekci velmi rozdílných druhů povrchů a jejich speciální modifikace - difúzní snímače s potlačeným pozadím nebo popředím mohou být použity i pro detekci tmavých předmětů před světlým pozadím díky nastavitelné geometrii snímací optiky. Typické použití je: rozlišení předmětů podle barvy (odrazivosti povrchu) počítání předmětů na páse detekce přítomnost předmětu apod. správná orientace předmětu před dalším zpracováním
 počítání předmětů na páse. detekce přítomnost předmětu apod. správná orientace předmětu před dalším zpracováním.")
94
Retro reflexní snímače
Vysílač i přijímač světelného paprsku je ve společném pouzdře, proti tomuto snímači je umístěna odrazka nebo odrazná fólie. Detekce předmětu je realizována přerušením paprsku odraženého od odrazky. Výhodou je větší snímací vzdálenost a naprostá nezávislost na barvě a odrazivosti povrchu (u snímačů s polarizačním filtrem). Typickým použití je počítání výrobků na dopravním páse, kontrola překročení rozměrů, kontrola vybočení z předem určené dráhy, kontrola obrysů apod.
. Typickým použití je počítání výrobků na dopravním páse, kontrola překročení rozměrů, kontrola vybočení z předem určené dráhy, kontrola obrysů apod.")
95
Aplikace retroreflexních snímačů (obrázky z dokumentace firmy Ajptech)
")
96
Laserové snímače Špičkové vlastnosti dané pokrokovou technologií, přesně fokusovaný paprsek velmi malého průměru pro detekci obzvláště malých součástí a vysoká spínací rychlost řadí tyto snímače k nejmodernějším konstrukčním prvkům. Tento typ snímače je určen pro detekci velmi malých předmětů, jako jsou piny integrovaných obvodů, vývody konektorů, samostatné vodiče, velmi drobné díly v hodinářském průmyslu, výrobě elektronických obvodů, optiky a jemné mechaniky.

97
Měření polohy laserem Absolutní snímače polohy jsou laserové snímače pracující s odraženým laserovým paprskem a mohou vyhodnocovat vzdálenost, nebo rychlost pohybujícího se objektu. Pokud sledují rychlost objektu, pak pracují na principu interference. Laserové snímače slouží pro velice přesné bezkontaktní měření vzdálenosti. Pokrývají rozsahy od 20 mm do 1000 mm. Snímač principielně pracuje s triangulační metodou měření. Část laserového svazku dopadajícího na objekt je odražena zpět pod určitým úhlem, který se mění v závislosti na vzdálenosti objektu od snímače a jeho velikost je přepočítána na vzdálenost.

98
Změna úhlu je nelineární. O linearizaci se stará integrovaný procesor
Změna úhlu je nelineární. O linearizaci se stará integrovaný procesor. Rozlišení snímačů je pro dané měřicí rozsahy různé. Pomocí funkce "Teach-in" je možné si z měřicího rozsahu vybrat "okno" ve kterém budu měřit a dosáhnout tak maximálního rozlišení bez nutnosti plýtvat rozsahem analogového výstupu na momentálně nepotřebných vzdálenostech. Snímač je schopen se velmi rychle adaptovat na změnu barvy objektu změnou vnitřní citlivosti. Digitální výstup "alarm" je aktivní v okamžiku, kdy není možné dosáhnout požadované kvality měření (nedostatek světla - znečištění snímače, objekt je mimo měřicí rozsah apod.).
.")
99
Rozlišení snímačů je až 5 m
Rozlišení snímačů je až 5 m. Je necitlivý na změnu barvy povrchu snímaného objektu a kompenzuje nerovnosti. Polovodičový laser pracující ve viditelné oblasti spektra usnadňuje nastavení snímače. Pro snímání hrubých povrchů jsou k dispozici verze emitující laserovou linku. Takovéto řešení umožňuje mimo jiné i takové aplikace jako např. měření vzdálenosti perforovaných materiálů. Procesor umí správně vyhodnotit i takovou situaci, kdy část laserového svazku dopadne na "díru" případně okraj snímaného objektu.

100
přesné analogové polohování, měření vzdálenosti, měření tloušťky aj.
Výkon laseru je pod hranicí 1mW a proto není potřeba zvláštních bezpečnostních opatření. Integrovaný mikroprocesor eliminuje potřebu externí vyhodnocovací jednotky, provádí linearizaci a umožňuje předávat informace o poloze též v digitální formě prostřednictvím sériového rozhraní. Aplikace: přesné analogové polohování, měření vzdálenosti, měření tloušťky aj.

101
Laserové snímače s potlačeným pozadím
Laserové snímače s potlačeným pozadím pracují na principu trojúhelníkové metody vyhodnocení polohy detekovaného předmětu. Laserový snímač (obrázky z dokumentace firmy Ajptech)
")
102
Snímač je vybaven čočkou s měnitelnou polohou
Snímač je vybaven čočkou s měnitelnou polohou. Přijímač detekuje předmět nikoliv na základě rozdílu intenzity světla, ale polohy dané geometrií vysílač - přijímač - detekovaný předmět. Výsledkem je přesná detekce malých předmětů libovolné barvy proti libovolnému pozadí (například bílá vizitka na bílém stole).
.")
103
Optické snímání hladiny
Jedná se o jednoduché a přesné snímání přítomnosti hladiny. Hladina je spolehlivě detekována bez elektrického či teplotního kontaktu se snímačem.

104
K přenosu informace o přítomnosti hladiny je zde použito infračervené světlo. Snímač pracuje na principu změny indexu lomu mezi materiálem snímače a detekovanou kapalinou. Pokud je snímač mimo kapalinu je světlo generované infradiodou odraženo zpět a detekováno přijímačem snímače. Při ponoření čela snímače do kapaliny způsobí změna indexu lomu vyvedení světla ven z materiálu snímače a tato změna je snadno rozpoznatelná.

105
Za běžných podmínek je možno snímače použít např
Za běžných podmínek je možno snímače použít např. pro snímání hladin následujících kapalin: alkohol, éter, roztoky kyseliny sírové (náplň akumulátorů), voda, kyselina chlorovodíková, kyselina mléčná, ocet, minerální oleje, zředěné louhy.
, voda, kyselina chlorovodíková, kyselina mléčná, ocet, minerální oleje, zředěné louhy.")
106
Inkrementální snímače
Principem těchto inkrementálních snímačů je, že dráha (lineární nebo úhlová) je rozdělena na stejně velké úseky o velikosti Δs. Pak inkrementální snímač při překonání tohoto úseku vyšle 1 impuls, takže změřená poloha je dána počtem přírůstků (imkrementů) od zvolené počáteční polohy. Toto měření se vlastně provádí přičítáním či odečítáním impulsů. Základem těchto snímačů je průhledný materiál s mající na sobě průhledné a neprůhledné plošky od kterých se odvíjí vyhodnocování. Je pak jedno je-li to rovinný (pro rovinné pravítko) nebo kruhový tvar (pro úhlové natočení). Rozlišujeme následující typy inkrementálních snímačů: pravítko pro rovinné měření snímač úhlu natočení
 je rozdělena na stejně velké úseky o velikosti Δs. Pak inkrementální snímač při překonání tohoto úseku vyšle 1 impuls, takže změřená poloha je dána počtem přírůstků (imkrementů) od zvolené počáteční polohy. Toto měření se vlastně provádí přičítáním či odečítáním impulsů. Základem těchto snímačů je průhledný materiál s mající na sobě průhledné a neprůhledné plošky od kterých se odvíjí vyhodnocování. Je pak jedno je-li to rovinný (pro rovinné pravítko) nebo kruhový tvar (pro úhlové natočení). Rozlišujeme následující typy inkrementálních snímačů: pravítko pro rovinné měření. snímač úhlu natočení.")
107
Princip inkrementálního snímače
Disk je spojen s otočnou náhonou hřídelí, která je připevněna k otočné hřídeli motoru. Světlo vysílané světelným zdrojem například diodou LED, který je umístěn před diskem, může procházet diskem pouze průhlednými okénky, zatímco zbývající část disku neprůhledná, a pohlcuje světlo.

108
Světelné impulsy vytvářené otáčením disku aktivují optický snímač, který je převádí na elektrické impulsy nebo obdélníkový signál. Aby bylo u snímače zajištěno generování obdélníkových impulsů bez rušení, musí být elektrický signál zesílen a elektronicky zpracován. Pro zabezpečení proti rušení výstupních signálů se může snímat v diferenciálním režimu, kdy se porovnávají dva téměř totožné signály s opačnou fází, čímž se odstraňuje souhlasné rušení, protože stejné signály libovolného tvaru se vždy překryjí.

109
Pokud je zapotřebí rozeznávat směr pohybu a mít nastaven počátek, pak inkrementální enkodér musí generovat dva obdélníkové průběhy, vzájemně posunuté o 90°, které se nazývají dráha A a dráha B. Zpracováním samotné dráhy A lze získat informaci o rychlosti otáčení, pomocí druhé dráhy B je možné podle sekvence stavů generovaných oběma kanály rozeznat i směr otáčení.

110
Jinou možností je zpracování informace takové, že lze získat jak informaci o směru, tak i dvojnásobný počet pulsů, čímž se zlepší rozlišovací schopnost snímače. K dispozici je ještě další signál Z udávající referenční nebo-li nulovou polohu hřídele. Tento signál je obdélníkový a ve fázi s dráhou A. Výstup ze snímače se zpracovává v čítači, případně v obousměrném čítači.

111
V případě reflexních enkodérů jsou světelný zdroj přijímač umístěny vedle sebe na jedné straně kolečka, na kterém jsou jak reflexní tak matné plošky. Jejich střídání při otáčení kolečka způsobuje změny napětí na přijímači v závislosti na změnách odraženého světla. Při jejich rovnoměrném rozmístění po obvodu kolečka odpovídá jeden obdélník otočení vždy o shodný počet stupňů (vlevo kotouč v binárním kódu, vpravo v Grayově kódu).
..")
112
Číslicové vyhodnocení
Číslicové snímače dávají na výstupu digitální slovo reprezentující polohu (lineární či úhlovou hodnotu) vztaženou k referenčnímu bodu. Co se konstrukce týče jedná se vlastně o stejný princip jen s tím rozdílem, že je potřeba podstatně více snímačů. Každé stopě pak přísluší jeden fototranzistor. Jejich počet se odvíjí od velikosti maximálního rozsahu a kroku snímače. Kotouček je z důvodu bezpečného vyhodnocení sousedních stavů kódován v Grayově kódu.
 vztaženou k referenčnímu bodu. Co se konstrukce týče jedná se vlastně o stejný princip jen s tím rozdílem, že je potřeba podstatně více snímačů. Každé stopě pak přísluší jeden fototranzistor. Jejich počet se odvíjí od velikosti maximálního rozsahu a kroku snímače. Kotouček je z důvodu bezpečného vyhodnocení sousedních stavů kódován v Grayově kódu.")
114
Ultrazvukové snímače Ultrazvukové snímače pracují na principu měření času mezi okamžikem vyslání impulsu do doby příjmu odraženého signálu od detekovaného objektu . Jsou mimo jiné vhodné pro měření vzdálenosti. Ultrazvukový snímač se skládá ze tří funkčních bloků a to: ultrazvukový převodník, vyhodnocovací jednotka, výstupní obvod.

115
Princip činnosti ultrazvukového snímače

116
Ultrazvukový převodník vyšle krátký puls, potom se přepne do přijímacího režimu a je vyhodnocován přijatý odražený ultrazvukový puls u něhož se nejdříve prověří zda jde opravdu o odraz vyslaného signálu. Pokud je tomu tak, pak je z délky intervalu a rychlosti šíření zvuku odvozeno, zda předmět leží v předem nastaveném rozmezí a podle toho je upraven stav výstupu. Pokud pracuje vyhodnocovací jednotka spojitě, můžeme spojitě vyhodnocovat skutečnou vzdálenost sledovaného předmětu.

117
Vlastní nasazení snímačů závisí na konkrétním typu aplikace, je třeba vzít v úvahu některé parametry: vlastnosti měřeného objektu z důvodu detekovatelnosti. Zvukové vlny odráží většina materiálů a díky tomu je lze detekovat, ale některé materiály jako např. vata zvukové vlny naopak pohlcují a lze je detekovat pouze v omezeném rozsahu vzdáleností. Měřenými objekty mohou být tuhé látky, kapaliny nebo sypké materiály. Maximální měřená vzdálenost objektu závisí na jeho odrazových vlastnostech, jeho velikosti, materiálu a povrchu. Objekt může být různého tvaru a barvy, lze měřit i velmi malé objekty. Výhodnou vlastností těchto snímačů je schopnost měřit vzdálenost průsvitných materiálů, jako je např. sklo

118
úhel vysílaného paprsku je udáván pro pokles úrovně vysílaného paprsku o 3 dB. Pro velké vzdálenosti musí objekt ležet v mezích úhlu vysílaného paprsku měřicí rozsah je definován maximální měřenou vzdáleností a minimální vzdáleností měření. Maximální vzdálenost je vzdálenost, z které je přijímač schopen přijmout odražený signál s ještě dostatečnou intenzitou. Minimální vzdálenost je v těsné blízkosti snímače a nelze vzdálenost objektu správně změřit díky fyzikálním vlastnostem snímače (měniče signálu vysílající a přijímající zvukové vlny vyžadují, aby vyslaný puls byl kompletní před přepnutím na funkci přijímače - potřebné době přepínání funkce vysílač / přijímač odpovídá právě minimální vzdálenost)
")
119
rychlost měření, protože nové měření je možné provést až po příjmu odraženého zvukového signálu z předcházejícího měření. Proto mají snímače s velkým měřicím rozsahem malou rychlost měření a opačně. vlivy prostředí, kdy vliv na ultrazvukové měření mají i vlastnosti přenosového média. Některé přesnost měření neovlivňují (např. vlhkost, prašnost, kouř) jiné naopak ovlivňují (tlak), nejvýraznější je vliv teploty. Neschopnost funkce snímače mohou způsobit také kapaliny s intenzivním odpařováním. Také prudké pohyby vzduchu a turbulence vedou k nestabilitě měření, nicméně rychlost proudění vzduchu v otevřeném prostředí nanejvýš několik m/s není překážkou
 jiné naopak ovlivňují (tlak), nejvýraznější je vliv teploty. Neschopnost funkce snímače mohou způsobit také kapaliny s intenzivním odpařováním. Také prudké pohyby vzduchu a turbulence vedou k nestabilitě měření, nicméně rychlost proudění vzduchu v otevřeném prostředí nanejvýš několik m/s není překážkou.")
120
Pro nasazení ultrazvukového snímače je nutné zjistit, zda předmět je vhodný ke snímání ultrazvukem. Pro tento účel rozdělujeme materiály na dvě skupiny: zrnitost odrazné plochy je menší jak vlnová délka ultrazvukového vlnění (tomto případě se chová šíření přesně podle zákona o rovnosti dopadu a odrazu) zrnitost odrazné plochy je větší než vlnová délka ultrazvukového vlnění (dochází pouze k částečnému odrazu a částečnému rozptýlení do různých stran)
 zrnitost odrazné plochy je větší než vlnová délka ultrazvukového vlnění (dochází pouze k částečnému odrazu a částečnému rozptýlení do různých stran)")
121
Hlavní výhody měření pomocí ultrazvuku jsou:
bezdotykové měření jednoduché nastavení nenáročnost údržby odolnost vůči otěru měřeného materiálu necitlivost na změnu hustoty měřeného materiálu a na změnu dielektrických parametrů měřeného materiálu necitlivost na změnu tlaku v přípustném rozsahu tlaků

122
Princip vyzařování a různé druhy snímačů

123
Použití: měření vzdálenosti strojních součástí, ale i jiných výrobků včetně skla, kontrola pohybu lidí, vzdálenost mezi přepravními vozíky - vše v pohybu počítání objektů rozličných tvarů kompletace zboží v zásobnících (lahve v bedně) měření hladin většiny sypkých látek a kapalin v nádržích nebo silech kontrola navíjení a odvíjení v papírenském nebo textilním průmyslu třídění materiálu podle jeho výšky na dopravníku střežení nedostupných oblastí
 měření hladin většiny sypkých látek a kapalin v nádržích nebo silech. kontrola navíjení a odvíjení v papírenském nebo textilním průmyslu. třídění materiálu podle jeho výšky na dopravníku. střežení nedostupných oblastí.")
124
Snímače tlaku a síly

125
Snímače tlaku a síly Měřítkem tlaku je síla působící kolmo na jednotku plochy p = F/S kde p je tlak (Pa), F je síla působící na plochu (N) a S je plocha,na kterou působí síla rovnoměrně a kolmo (m2). Základní jednotkou je pascal (Pa) 1 Pa = 1m-1 kg s-2
, F je síla působící na plochu (N) a S je plocha,na kterou působí síla rovnoměrně a kolmo (m2). Základní jednotkou je pascal (Pa) 1 Pa = 1m-1 kg s-2.")
126
Hydrostatický tlak Hydrostatický tlak je tlak způsobený tíhou kapalinového sloupce: P = F/S = h.r.g kde p je hydrostatický tlak kapalinového sloupce (Pa) F je tíhová síla kapalinového sloupce F= Srgh (N) S je plocha dna sloupce (m2), r je hustota kapaliny (kgm-3) g je tíhové zrychlení (m/s), h je výška kapalinového sloupce (m)
 F je tíhová síla kapalinového sloupce F= Srgh (N) S je plocha dna sloupce (m2), r je hustota kapaliny (kgm-3) g je tíhové zrychlení (m/s), h je výška kapalinového sloupce (m)")
127
Hydrostatický tlak závisí na výšce kapalinového tlaku,na hustotě kapaliny a na tíhovém zrychlení.
Dříve se používala jednotka hydrostatického tlaku - torr, který byl vyjádřen tíhovou silou 1mm rtuťového sloupce 1 mmHg = 1 torr = 133,322Pa nebo tíhovou silou vodního sloupce o výšce 1m 1m H2O = 9,8066 kPa

128
Atmosférický tlak je tlak aerostatického ovzduší obklopující Zemi
Atmosférický tlak je tlak aerostatického ovzduší obklopující Zemi. Je nejvyšší na povrchu Země a klesá se vzdáleností od jejího povrchu. Závisí na nadmořské výšce, teplotě a na vlhkosti vzduchu. Standardní (normální) atmosférický tlak je tlak Pa (nebo 1013,25 hPa). Při měření se můžeme setkat s měřením: absolutního tlaku (p je měřen od vakua - tlakové nuly) . Absolutní tlak je tlak jehož hodnota se blíží nule a představuje pojem vakuum. rozdílu tlaků přetlaku (p > než barometrický tlak) nebo podtlaku (p < než barometrický tlak)
 atmosférický tlak je tlak Pa (nebo 1013,25 hPa). Při měření se můžeme setkat s měřením: absolutního tlaku (p je měřen od vakua - tlakové nuly) . Absolutní tlak je tlak jehož hodnota se blíží nule a představuje pojem vakuum. rozdílu tlaků. přetlaku (p > než barometrický tlak) nebo podtlaku (p < než barometrický tlak)")
130
Piezoelektrické snímače
Princip činnosti piezoelektrického snímače je založena na piezoelektrickém jevu, při němž deformací krystalů dielektrik, které nejsou středově souměrné vzniká polarizací vázaný náboj. Ten může na elektrodách přiložených k povrchu krystalu indukovat volný náboj. Používanými materiály jsou tzv. feroelektrika jako je titaničitan barnatý, tj. látky, které se v elektrostatickém poli nebo účinkem síly snadno polarizují. V měřící technice se používá především křemen SiO2. Piezoelektrické krystaly se používají pro měření časově proměnných sil.

131
Čidlo se při působení neelektrické veličiny chová jako generátor elektrického signálu. Představuje zdroj napětí s velkým vnitřním odporem, protože dielektrikum má značný izolační odpor. Mezi elektrodami piezoelektrického čidla vzniká napětí U při působení měřené veličiny, které se převádí na napětí. Výstupní napětí piezoelektrického čidla je relativně velké, k měření však není možné použít přímoukazující měřicí přístroj. Mezi měřicí přístroj a čidlo musí být zařazen zesilovač s velkým vstupním odporem, jehož hlavním úkolem je zajistit impedanční přizpůsobení, méně již vlastní zesílení signálu. Běžně se využívají obvody realizované s tranzistory řízenými elektrickým polem.

132
Piezoelektrický modul křemene má poměrně malou hodnotu, jeho výhodou je lineární statická charakteristika, nepatrná závislost piezoelektrické konstanty na teplotě, velký měřicí rozsah daný mechanickou pevností krystalu a široké rozmezí pracovní teploty (až 550° C). Piezoelektrická čidla na bázi piezoelektrické keramiky (BaTiO3) jsou v porovnání s křemennými asi desetkrát citlivější, avšak při významně nižší maximální pracovní teplotě (200° C).
 jsou v porovnání s křemennými asi desetkrát citlivější, avšak při významně nižší maximální pracovní teplotě (200° C)..")
133
Piezoelektrické čidlo tlaku je vytvořeno spojením několika disků z piezokeramiky. Podmínkou dosažení lineární charakteristiky čidla je mechanické předpětí. Má velmi příznivé dynamické vlastnosti, jeho odezva činí řádově několik mikrosekund. Piezoelektrické snímače tlaku jsou vhodné k měření časově proměnných tlaků a rychlých dějů. Měřit statický tlak v podstatě nemohou, jelikož náboj vzniklý po přiložení tlaku se vlivem nedokonalostí izolace vybíjí a napětí na elektrodách stále klesá. Maximální horní mez měřicího rozsahu je u snímačů tohoto typu 100 MPa. Jako měřící obvody se používají zesilovače s vysokým vstupním odporem

134
Princip piezokrystalu a zapojení zesilovače s vysokým vstupním odporem

135
Při působení mechanických deformací dochází u řady druhů krystalů k vyvolání elektrického náboje. Tento děj je obousměrný, takže přiložením střídavého elektrického pole se krystal naopak mechanicky rozkmitá v rytmu frekvence napětí. Uvedené vlastnosti vykazují např. křemen, titaničitan barnatý, některé makromolekulární látky atd. V praxi se nejčastěji využívají vlastnosti SiO2 a BaTiO3. Piezoelektrický prvek se získá vyříznutím plátku z krystalu křemene a to s hranami rovnoběžnými s jednotlivými osami krystalu (x – elektrická osa, y – mechanická osa, z – optická osa). Působí-li pak síla kolmo na optickou osu, krystal se zelektrizuje a na plochách kolmých na elektrickou osu se objeví elektrický náboj.
. Působí-li pak síla kolmo na optickou osu, krystal se zelektrizuje a na plochách kolmých na elektrickou osu se objeví elektrický náboj..")
136
Působí-li na křemennou destičku rovnoměrně rozložená síla Fx podél elektrické osy x, hovoří se o tzv. podélném piezoelektrickém jevu, při němž se záporné body krystalické mřížky posunou vzhledem ke kladným bodům, což vyvolá náboj na plochách s kovovými elektrodami.

137
Uspořádání piezoelektrického snímače tlaku
Snímač obsahuje dva piezoelektrické výbrusy ve tvaru disku, které jsou zapojeny elektricky paralelně a jejichž náboje se sčítají. Přenos tlakové síly na krystal je zprostředkován membránou. Aby se vyloučilo smykové namáhání, musí být elektrody a rovina krystalu paralelní s přesností 10 μm při nerovnosti povrchu menší než 1 μm. Takové vlastnosti lze zajistit pouze velmi dokonalými procedurami leštění povrchu.

138
Případné nerovnosti by mohly vyvolat místní napětí vedoucí až k prasknutí křehkého výbrusu. Snímač je vybaven obvodem pro kompenzaci vlivu zrychlení, k čemuž se využívá přidaná hmota a piezoelektrický krystal s opačnou polarizací. Kryt, v němž je zabudován i zesilovač s velkým vstupním odporem, celý snímač také elektricky i magneticky stíní.

139
Rezonanční snímače tlaku
U rezonančních snímačů tlaku je využita závislost vlastní frekvence mechanického kmitání rezonančního prvku na jeho mechanickém napětí. Jeden konec struny je přichycen k membráně, druhý k tělesu snímače. Kmitání struny je buzeno elektromagneticky. Struna délky l a hmotnosti m napínaná silou F má rezonanční frekvenci f0. Vlastní frekvenci rezonátoru ovlivňují rozměr a tvar kmitajícího prvku, jeho měrná hmotnost, modul pružnosti materiálu, z něhož je vyroben, a mechanické napětí. Při daném uspořádání změna tlaku působícího na membránu vyvolá změnu mechanického napětí struny, a tím změnu její vlastní frekvence. Detekovaná změna frekvence je nositelem informace o změně tlaku.

140
Měřený tlak působí prostřednictvím vhodného převodního mechanismu (nejčastěji membrána) na rezonanční prvek, což může být struna, válec, membrána anebo miniaturní mikromechanický prvek (u nejmodernějších snímačů). Mechanický rezonátor je zapojen do zpětnovazební smyčky oscilátoru s elektronickým zesilovačem. Působením tlaku na rezonanční prvek v něm vznikají tahové nebo tlakové síly určující kmitočet oscilátoru. Protože změna teploty ovlivňuje modul pružnosti a rozměry i hustotu měřicího prvku, je nezbytné korigovat vliv teploty na výstupní signál.

141
Princip uspořádání snímače tlaku s rezonující strunou
(převzato z AUTOMA 10/2007)
")
142
Tenzometry Tenzometry vyhodnocují změnu odporu, která vzniká změnou geometrických rozměrů nebo krystalografické orientace snímacího tenzometru a to vlivem deformace pružícího měrného prvku se kterým je tenzometr pevně spojen. Jejich výhodou jsou malé rozměry. Tyto snímače se dělí na : kovové, které jsou realizovány z tenkých drátků o průměru 10 – 40 μm a jsou vyráběny ze slitin Cu-Ni (konstantanu), Ni-Cr (Nichrom) aj. Elektrický odpor je 120 až 600 Ω. Podle provedení mohou být: lepené na podložce např. na pevný speciální papír
, Ni-Cr (Nichrom) aj. Elektrický odpor je 120 až 600 Ω. Podle provedení mohou být: lepené na podložce např. na pevný speciální papír.")
143
fóliové (fotolitografická technologie), které jsou vyráběny na plastové podložce odleptáním napařené fólie, kde tloušťka fólie je 1 – 10 μm a tloušťka podložky od 10 μm výše. Povrch je pak pasivován krycí fólií. Tenzometrické snímače složitých tvarů se vyrábějí odleptáváním tenké odporové fólie jako plošné spoje. Takto zhotovené tenzometrické snímače mají lepší vlastnosti než snímače drátkové. napařované (tenkovrstvá technologie)
")
144
polovodičové, které jsou založeny piezorezistivního jevu a které se vyrábějí z křemíku opracováním (řezáním a broušením) monokrystalu, nebo planární technologií na nějakém substrátu (např. křemíkovém aj.) Jsou vždy citlivější než tenzometry založené na kovových drátcích, mají však velkou teplotní závislost (řeší se 2 tenzometry – zatíženým a nezatíženým ve Wheatsonově můstku a nelineární charakteristiku. Ohmický odpor polovodičového tenzometru může být 60 až 1000 Ω. Podle provedené mohou být:
 Jsou vždy citlivější než tenzometry založené na kovových drátcích, mají však velkou teplotní závislost (řeší se 2 tenzometry – zatíženým a nezatíženým ve Wheatsonově můstku a nelineární charakteristiku. Ohmický odpor polovodičového tenzometru může být 60 až 1000 Ω. Podle provedené mohou být:.")
145
monokrystalické lepené na podložce, nebo na měřeném mechanickém členu,
polykrystalické, integrované na křemíkovém substrátu

146
Kovové tenzometry V jedné větvi je tenzometrický snímač Rm, vystavený účinkům síly F. V druhé větvi je srovnávací tenzometr Rr, který eliminujeme vliv teploty. Tenzometr Rr musí mít naprosto stejné vlastnosti jako snímač Rm, musí být nalepen v jeho blízkosti, aby měl shodnou teplotu, ale nesmí být mechanicky namáhán. Tenzometr jsou realizovány odporovým drátkem, který může být jednoduchý nebo vícenásobným, často používaný ve formě ploché cívky nalepené na podložku. Při napínání odporového drátu se mění jeho odpor, který je vyhodnocován ve Wheastnově můstku. Tyto snímače jsou používány při zjišťování pružnými deformacemi (vnitřní napjatostí) zejména v mostních konstrukcích, konstrukcích letadel aj.
 zejména v mostních konstrukcích, konstrukcích letadel aj.")
147
Pružnými deformacemi se rozumí síly působící v mezích platnosti Hookova zákona a jsou vyvolány tlakem nebo tahem. Výhodou tohoto měření spočívá ve zjišťování pružných deformací v konstrukci bez jejího porušení. Navíc je možno současně měřit jednoduchými snímači ve dvou osách, pokud jsou nalepeny pootocené o 90° proti sobě, nebo speciálními konstrukcemi, které to zvládnou naráz.

148
Zapojení teplotně kompenzovaného odporového snímače ve Wheatsonově můstku

149
Ukázky provedení různých odporových tenzometrů
Ukázky provedení polovodičových snímačů

150
Pokud je třeba měřit tlak plynu nebo kapaliny, pak je to možné pro oddělení od těchto médií snímat pomocí vlnovce či membrány s vlastní tuhostí na kterých jsou připevněny tenzometry, nebo na ně přímo naneseny. Podstata funkce spočívá v přesné změně odporu v závislosti na mechanické deformaci způsobené rozdílem tlaků. Membrána, na jejímž povrchu jsou vytvořeny polovodičové tenzometry, je současně pružným elementem pro snímání tlaku.

151
Vedle tenzometrů pro měření povrchové deformace v tahu a tlaku v určeném směru jsou vyráběny tenzometry s mřížkami vzájemně pootočenými o 45°, které jsou určeny k měření torzní povrchové deformace (např. hřídelů zatěžovaných krouticím momentem). Pro měření hlavního vektoru povrchové deformace v neznámé rovině napjatosti se používají tzv. rozety složené nejčastěji ze dvou tenzometrů vzájemně pootočených o 90°. Princip odporového tenzometrického snímače lze vysvětlit na deformaci odporového drátku o délce l, průřezu S (průměru d) a měrném odporu R, na který působí síla F tak, že se drátek prodlouží o délku l.
 a měrném odporu R, na který působí síla F tak, že se drátek prodlouží o délku l.")
152
ΔR/R = (Δ/) + (Δl/l) – (ΔS/S)
Princip tenzometru Odpor vodiče v klidové poloze je roven R = .l/S Díky působení síly se změní jeho odpor o ΔR, protože se změní jeho délka o Δl y plocha o ΔS. Díky změnám struktury vznikne též změna o Δ a pak pro změny bude platit ΔR/R = (Δ/) + (Δl/l) – (ΔS/S)
 + (Δl/l) – (ΔS/S)")
153
Pokud se bude uvažovat relativní deformace
ε = Δl/l pak pro relativní změnu odporu pružné deformace z toho vyplývá ΔR/R = k.(Δl/l) = k.ε kde k je koeficient deformační citlivosti závisící na materiálu vodiče. Tato hodnota se v praxi určuje experimentálně.
 = k.ε. kde k je koeficient deformační citlivosti závisící na materiálu vodiče. Tato hodnota se v praxi určuje experimentálně.")
154
Nosník siloměrného členu
Na obrázku je ukázka správného umístění tenzometrů pro měření síly na konci vetknutého nosníku, což reprezentuje 2 tenzometry. U vetknutého nosníku je tenzometr A je namáhán na tah a tenzometr B na tlak. Zapojením těchto tenzometrů do různých větví můstku dochází ke zvýšení citlivosti měření a současně ke kompenzaci teplotní závislosti odporu.

155
V měřicím můstku jsou tenzometry zapojeny tak, že tenzometry namáhané stejným směrem jsou umístěny v protilehlých větvích můstku. Výsledná citlivost je potom čtyřnásobná ve srovnání s použitím jednoho tenzometru. je třeba jistit snímač proti přetížení. Použitím různých siloměrných členů i deformačních elementů se dosahuje u snímačů tlaku s odporovými tenzometry měřicích rozsahů např. 0 - 10 kPa až 0 - 40 MPa. Na stejném principu pracují i snímače diferenčního tlaku, u kterých je měřicím prvkem membrána.

156
Polovodičové tenzometry
Polovodičové tenzometry se vyrábějí z křemíku, a to buď řezáním, broušením či leptáním monokrystalu, nebo planární technologií na křemíkovém. Tenzometry z monokrystalu se buď lepí na vhodnou podložku, nebo přímo na měřicí mechanický člen. Působením mechanického namáhání v určité krystalografické ose monokrystalu polovodiče dochází ke změně elektrické vodivosti. Změna odporu závisí na typu polovodiče i na koncentraci příměsí. Bohužel polovodičové tenzometry vykazují nelineární závislosti odporu jak na deformaci, tak i na teplotě. Závislost relativní změny odporu na relativní deformaci je vyjádřena vztahem: ΔR/R = C1ε + C2ε2

157
pak koeficient citlivosti k u polovodičového tenzometru je vyjádřen vztahem
k = C1 + C2ε2 Protože lze tyto snímače realizovat na vodivosti typu jak n, tak i p platí : u polovodiče typu n je konstanta C1 záporná a odpor s namáháním klesá, u polovodiče typu p je konstanta C1 kladná a odpor s namáháním stoupá. Koeficient citlivosti k se u polovodičových tenzometrů pohybuje v rozmezí 50 – 175. Opět je vhodné používat zapojení ve Wheatsonově můstku v němž vhodným zapojením lze kompenzovat změny teplot, zvýšit citlivost měření a potlačit nelinearitu snímače.

158
Použití polovodičových tenzometrů:
měření deformací objektů (mostů a podobných konstrukcí) měření síly, tlaku, krouticího momentu, momentu síly, mechanického napětí spojů přesné váhy, přesné snímače zatížení aj., součást některých integrovaných senzorů tlaku, síly, váhy měření vibrací a deformací apod. váhy pro měření v aerodynamickém tunelu přesné snímače zatížení
 měření síly, tlaku, krouticího momentu, momentu síly, mechanického napětí spojů. přesné váhy, přesné snímače zatížení aj., součást některých integrovaných senzorů tlaku, síly, váhy. měření vibrací a deformací apod. váhy pro měření v aerodynamickém tunelu. přesné snímače zatížení.")
159
Přednosti snímačů s křemíkovými tenzometry:
velký výstupní signál - desítky až stovky mV využitelnost i v prostředí s rušivými elektromagnetickými vlivy vysoká životnost - někdy až 109 cyklů plného pracovního zatížení odolnost proti soustavnému přetěžování do 200% jmenovitého rozsahu

160
Nové snímače firmy Freescale
Mechanická struktura citlivé části senzoru je vytvořena z křemíku a integrována na jednom monolitickém integrovaném obvodu s ostatní elektronikou. Princip měření, resp. převod působícího tlaku na elektrickou veličinu, je často založen na jednom z následujících principů: změnou kapacity kondenzátoru působením tlaku, změna odporu dráhy na níž působí tlak (tenzometry), piezoelektrickém jevu, tzn. vzniku napětí s působícím tlakem
, piezoelektrickém jevu, tzn. vzniku napětí s působícím tlakem.")
161
Integrovaná kapacitní měřící buňka se využívá pro měření velkých tlaků a v absolutních senzorech tlaku. Například senzory absolutního tlaku firmy Freescale do 0,9 Mp pro měření v pneumatikách využívají porovnání kapacit měřícího kondenzátoru, tvořený jednou pevnou a pružnou křemíkovou elektrodou, a referenčního kondenzátoru pro eliminaci nežádoucích okolních vlivů (např. teploty). Jde o princip snímání prohnutí membrány tenzometrickým odporovým můstkem.
. Jde o princip snímání prohnutí membrány tenzometrickým odporovým můstkem..")
162
Další řešení je s integrovaným Wheatstonovým můstkem složený ze čtyřek tenzometrů, které mění svůj odpor se změnou svých rozměrů při průhybu membrány vlivem působícího tlaku a tak převádějí působící tlak na elektrickou veličinu. Nejnovější tenzometr využívá křemíkových piezorezistorů, které při působením tlaku přímo generují el. napětí na dvou kontaktních ploškách. Princip piezoelektrického senzoru X-ducer

163
Posloupnost bloků senzoru převádějící tlak P na hodnotu napětí
Provedení Integrované senzory tlaku jsou obvykle povrchově integrovaná mikrozařízení, často označované jako MEMS, které se sestávají až ze tří částí: tlakový senzor - povrchově integrovaná měřící buňka, teplotní senzor ( jen v některých případech), ASIC CMOS analogové nebo digitální integrované obvody pro zpracování signálů ze senzoru Posloupnost bloků senzoru převádějící tlak P na hodnotu napětí
, ASIC CMOS analogové nebo digitální integrované obvody pro zpracování signálů ze senzoru. Posloupnost bloků senzoru převádějící tlak P na hodnotu napětí.")
164
Někdy se na chipu objevují dvě měřící buňky, kdy je jedna měřící žádaný působící tlak a druhá funguje jako referenční pro eliminaci vlivu teploty. V případech digitálních výstupů senzorů, druhý blok zpracování signálu obsahuje převod analogového signálu na jiný druh digitálního, resp. diskrétního signálu. Vzhledem k tomu, že měřící senzor je velmi citlivý je ho nezbytně nutné chránit krytem proti mechanickému poškození.

165
teplotně kompenzované (compensated),
Příklad mechanického řešení pouzdra chránící citlivý senzor a typy pouzder senzorů Tyto senzory lze rozdělit do dvou skupin, podle vlivu vnitřní logiky a zpracování na samotné měření, na: teplotně kompenzované (compensated), teplotně nekompenzované (uncompensated)
, teplotně nekompenzované (uncompensated)")
166
Na obrázku je příklad typických průběhů tlakových senzorů kompenzovaných a nekompenzovaných, kde je patrná minimální závislost výstupu na změně teploty díky kompenzaci dalším křemíkovým senzorem teploty umístěného přímo na chipu.

167
Magnetické snímače Jejich činnost je založena na stanovení změn magnetických veličin vyvolaných deformacemi feromagnetických materiálů. Nejčastěji se využívá principů magnetostrikce a magnetoanizotropie.

168
Magnetostrikce Magnetostrikce je fyzikální jev při němž se vlivem sil vyvolaných magnetickým polem mění rozměry feromagnetika nebo naopak vlivem deformací vyvolaných vnějšími silami se mění permeabilita feromagnetika. Magnetostrikční snímače pracující na tomto principu mají nejčastěji magnetický obvod z permalloye (Fe+Ni+Mo) nebo transformátorové oceli. Výstupní veličinou je změna indukčnosti, kterou vyhodnocujeme např. můstkovými metodami.
 nebo transformátorové oceli. Výstupní veličinou je změna indukčnosti, kterou vyhodnocujeme např. můstkovými metodami.")
169
Magnetoanizotropní snímače
Základ magnetoanizotropního snímače tvoří těleso složené z plechů v němž jsou ve čtyřech otvorech symetricky vzhledem ke středu vložena dvě vinutí. Nepůsobí-li na toto těleso síla je vazba mezi vinutími minimální. Po zatížení tělesa se magnetický tok budícího vinutí natočí tak, že zasáhne sekundární obvod v němž indukuje výstupní napětí úměrné působící síle. Magnetostrikční a magnetoanizotropní snímač

170
Snímače tepelných veličin

171
Teplota je fyzikální veličina vyjadřující míru tepelného stavu tělesa
Teplotních stupnic je celá řada, z nichž nejdůležitější jsou : Celsiova Kelvínova, což je 273,16tá část termodynamické teploty trojného bodu vody, kdy 0K je absolutní nula mezinárodní stupnice ITS-90 (International Temperatur Scale), která je definována 17 pevnými body, což jsou trojné body, body tání a tuhnutí různých látek.
, která je definována 17 pevnými body, což jsou trojné body, body tání a tuhnutí různých látek.")
172
Vzájemná souvislost stupnic je následující :
T = υ + 273,16 [K], [°C] Tyto snímače se dělí na : dotykové, bezdotykové.

173
Termoelektrické snímače
Termoelektrické teploměry jsou teploměry jako řada následujících dotykové a vedle odporových teploměrů nejvýznamnější skupinou používanou v praxi. Termočlánky využívají Seebeckova jevu při kterém vzniká mezi konci dvou různých kovů nebo polovodičů elektrické napětí zvané termoelektrické napětí. To však jen v případě, jsou-li jejich druhé konce navzájem spojeny a mají rozdílnou teplotu než konce srovnávací. Čidlo je složeno ze dvou elektricky vodivých kovových vodičů z různých materiálů.

174
Ty jsou spojeny do elektrického obvodu
Ty jsou spojeny do elektrického obvodu. Pokud jsou oba konce obvodu vloženy do prostředí s různou teplotou (jeden konec měřící a druhý referenční), dojde ke vzniku termoelektrického napětí, jehož velikost je úměrná rozdílu teplot na obou koncích obvodu. Potom je možno měřit i přímo připojením měřícího přístroje s vnitřním odporem větším než 10 kΩ.
, dojde ke vzniku termoelektrického napětí, jehož velikost je úměrná rozdílu teplot na obou koncích obvodu. Potom je možno měřit i přímo připojením měřícího přístroje s vnitřním odporem větším než 10 kΩ.")
175
Samotné spojení dvou kovových vodičů tvořících termočlánek může být provedeno několika způsoby na základě použití čidla. Používá se svařování nebo pájení pomocí měkké či tvrdé pájky (do 700 °C). Pro spoj v měřeném prostředí je dále užíván název teplý, srovnávací spoj je pak studený. Závislost generovaného termoelektrického napětí na rozdílech teplot není lineární. Jen v úzkém teplotním rozsahu lze využít vztahu: Ute = α.ΔT kde Ute je napětí generované termočlánkem (mV) a α je Seebeckův koeficient úměrnosti, ΔT rozdíl teplot na obou koncích měřicího obvodu (°K).
 a α je Seebeckův koeficient úměrnosti, ΔT rozdíl teplot na obou koncích měřicího obvodu (°K).")
176
Pro určité teplotní intervaly lze pak neznámou teplotu určit následující rovnicí:
kde t je neznámá teplota (°C), ai jsou koeficienty pro daný typ termočlánku a Ute je generované termoelektrické napětí (mV), n je řád polynomu.
, ai jsou koeficienty pro daný typ termočlánku a Ute je generované termoelektrické napětí (mV), n je řád polynomu.")
177
Tabulka termočlánků Charakteristiky termočlánků

178
Jak je patrno z předchozího obrázku, též termočlánky vyžadují kompenzace. Avšak největší vliv na měření má účinek teploty okolí na studený spoj a úbytek napětí v důsledku vlivu skutečných odporů v obvodu. Proto je třeba provádět kompenzaci tak, že například se studený konec umístí v termostatu, nebo v krajním případě směsi vody a ledu. V každém případě je nezbytné udržovat studený konec na konstantní teplotě s tolerancí ± 0.1° C. Jiný způsob je elektrická kompenzace, kdy je v obvodu zapojen můstek se 3 pevnými a jedním měděným odporem. V okamžiku, kdy dojde k odchylce od referenční hodnoty, změní se i hodnota měděného vodiče, čímž je realizována kompenzace.

179
Termočlánky jsou většinou vyráběny z drahých kovů
Termočlánky jsou většinou vyráběny z drahých kovů. Z tohoto důvodu se pro spojení teplého konce snímače se zbytkem snímače používá kompenzační vedení, které však nesmí do obvodu zanášet žádné parazitní termoelektrické napětí. Běžně se proto používá měděný vodič. Použití termočlánků je hlavně tam, kde vzhledem k miniaturním rozměrům je třeba měřit bodovou teplotu.

180
Odporové kovové snímače
Tento způsob měření je založen na závislosti odporu čistého kovu na teplotě, kdy se zvětšující se teplotou se snižuje pohyblivost elektronů a úměrně stoupá jeho odpor v závislosti na. Pro použití v praxi musí splňovat odporový teploměr následující kriteria: teplotní koeficient odporu a by měl být co největší a časově stálý, odpor snímače při referenční teplotě by měl být co největší, protože při vysokém odporu totiž vodičem prochází malé proudy, které tudíž způsobují malý ohřev, je nezbytné používat zvolené teploměry jen v teplotním rozsahu, pro který jsou určeny, je nezbytná linearizace, protože charakteristika i těchto snímačů není zcela lineární.

181
U kovových odporových teploměrů dochází se vzrůstající teplotou k růstu odporu. Tato závislost je vyjádřena teplotním koeficientem odporu a, který určuje průměrný přírůstek odporu při změně teploty o 1 °C v rozsahu 0 až 100 °C. α = (R100 – R0)/(R0.Δt) kde α je teplotní koeficient odporu, R0 (Ω) je odpor vodiče při teplotě 0° C, R100 (Ω) je odpor vodiče při teplotě 100° C, Δt je teplotní změna 100 °C.
/(R0.Δt) kde α je teplotní koeficient odporu, R0 (Ω) je odpor vodiče při teplotě 0° C, R100 (Ω) je odpor vodiče při teplotě 100° C, Δt je teplotní změna 100 °C.")
182
Pro měřený odpor Rt (W) pak tedy platí:
1. Při teplotním rozsahu 0 až 100 °C Rt = (R0 + α.t) 2. Pro oblast kladných teplot 0 až 630 °C: Rt = R0.(1 + A.t + Bt2) 3. Pro oblast záporných teplot Rt = R0.(1 + Ct + Dt2 + E.(t – 100).t3) kde A, B, C, D, E jsou konstanty odporového materiálu udávané výrobcem teploměru, t (°C) je měřená teplota, R0 (Ω) je odpor při teplotě 0 °C.
 2. Pro oblast kladných teplot 0 až 630 °C: Rt = R0.(1 + A.t + Bt2) 3. Pro oblast záporných teplot. Rt = R0.(1 + Ct + Dt2 + E.(t – 100).t3) kde A, B, C, D, E jsou konstanty odporového materiálu udávané výrobcem teploměru, t (°C) je měřená teplota, R0 (Ω) je odpor při teplotě 0 °C.")
183
Nejčastěji se pro tato měření používá platiny a niklu, molybden a měď
Nejčastěji se pro tato měření používá platiny a niklu, molybden a měď. Kovy (platina, nikl a molybden) jsou výhodné z toho důvodu, že mají výborné vlastnosti jako je chemická netečnost, dlouhodobá stálost odporu, vysoký koeficient odporu a vysoká teplota tání (platina ° C, nikl ° C, molybden ° C). Platina se používá pro rozsah teplot -250° C až 850° C, nikl pak -70° C až 200° C. Pro měření nízkých teplot se používá slitin na bázi rhodium-železo.
 jsou výhodné z toho důvodu, že mají výborné vlastnosti jako je chemická netečnost, dlouhodobá stálost odporu, vysoký koeficient odporu a vysoká teplota tání (platina ° C, nikl ° C, molybden ° C). Platina se používá pro rozsah teplot -250° C až 850° C, nikl pak -70° C až 200° C. Pro měření nízkých teplot se používá slitin na bázi rhodium-železo.")
184
Závislost odporu Pt pro rozsah teplot od 0° C do 100° C

185
Platinové odporové snímače
V praxi je běžné dvojí uzpůsobení čidel: vinuté, vrstvové. Měřící odpor je tvořen spirálovitě stočeným tenkým platinovým drátkem síly 0,05 mm. Toto odporové vinutí může být zataveno do keramického nebo skleněného tělíska a uloženo v ochranné trubici. Nebo je odporové vinutí uloženo buď v kapilárách válcových keramických nosných tělísek nebo je navinuto na vnějším povrchu těchto tělísek a opatřeno krycím keramickým smaltem nebo skleněnou pájkou.

186
Platinové senzory teploty se též vyrábějí tenkovrstvou technologií, kdy podložku z Al2O3 je technikou napařování a iontovým leptáním nanesena vrstva odporového materiálu.

187
Tolerance a značení Tolerance jsou dány normou.
Označení teplotních čidel je následující : Pt 100 znamená, že se jedná o platinové čidlo s odporem 100 Ω při referenční teplotě 0 °C. Ni 1000 znamená, že se jedná o niklové čidlo s odporem 1000 Ω při referenční teplotě 21 °C.

188
Zapojení čidel pro měření
Odporové teploměry se vyrábějí se dvěma nebo čtyřmi vývody. U dvouvodičového provedení se při měření k odporu vlastního čidla připočítává i odpor vnitřního vedení a tím způsobuje značnou proměnnou chybu, protože chyba způsobená vlivem vnitřního odporu se dle teploty pohybuje v rozmezí od 0,1 do 0,5°C. Jako měřící část se používá Wheatsonova můstku. Nastavování odporem Rj lze realizovat kompenzaci odporu vedení.

189
Pro měření, kde tuto chybu nemůžeme zanedbat, je nutné použít buď třívodičové zapojení, kde se přidá další kompenzační rezistor Rj, čímž se opět vlivy ruší. Pro velké vzdálenosti je doporučováno čtyřvodičové zapojení u kterého se na oba konce vedení snímače připojí další dva vodiče napájené konstantním proudem. Protože je na klasických vývodech měřen úbytek napětí, pak z Ohmova zákona lze spočítat měřený odpor snímače teploty. Vlastní vzhled odporového snímače je dán jeho použitím Výše uvedená zapojení měří napětí na rezistoru a převádí se na některý z unifikovaných signálů.

191
Odporové polovodičové snímače
Obdobně jako u kovových odporových snímačů dochází i zde ke změně elektrického odporu v závislosti na teplotě. Tyto polovodičové odporové snímače se dělí na snímače : monokrystalické odporové polovodičové snímače využívají teplotní závislosti napětí PN přechodu v propustném směru a se používají zejména při měření extrémně nízkých teplot, kde se využívá jejich vysoké citlivosti. Použitý materiál je většinou germanium, křemík a indium.

192
termistory jsou polovodičové součástky bez PN přechodu
termistory jsou polovodičové součástky bez PN přechodu. Mají proti odporovým teploměrům mnohem větší teplotní koeficient a to až 50x. Jejich výhodou jsou malé rozměry, umožňující měření téměř "bodových" teplot. Materiálem jsou většinou směsi různých kovových oxidů jako manganu, niklu, kobaltu, mědi, železa, titanu, uranu aj. lisovaných z prášků a spékaných za vysokých teplot. Termistory se dělí na : pozistory u kterých s rostoucí teplotou vzrůstá hodnota odporu, negastory u kterých s rostoucí teplotou klesá hodnota odporu.

193
Pozistory Pozistory (PTC - Positive Temperature Coefficient) mají ve srovnání s negastory složitější teplotní závislost. Odpor pozistoru se stoupající teplotou nejprve mírně klesá. Nad Courieovou teplotou tj. se projeví prudký nárůst rezistivity materiálu v závislosti na teplotě. Pro vzestupnou oblast odporu platí vztah: R = R0.eAtj kde R0 je odpor termistoru při teplotě T0, A je referenční hodnota, A = 0,16 K-1.
 mají ve srovnání s negastory složitější teplotní závislost. Odpor pozistoru se stoupající teplotou nejprve mírně klesá. Nad Courieovou teplotou tj. se projeví prudký nárůst rezistivity materiálu v závislosti na teplotě. Pro vzestupnou oblast odporu platí vztah: R = R0.eAtj. kde R0 je odpor termistoru při teplotě T0, A je referenční hodnota, A = 0,16 K-1.")
194
Často se vyrábějí z polykrystalické feroelektrické keramiky např
Často se vyrábějí z polykrystalické feroelektrické keramiky např. BaTiO3. Jmenovitý odpor se pohybuje v rozmezí 100 Ω až 200 kΩ. Teplota je dle chemického složení odstupňována v rozsahu od -80°C do 250°C, v případě směsi oxidů a vzácných zemin pak až do 1000 °C.

195
Negastory Negastory (NTC - Negative Temperature Coefficient) mají větší praktické využití než pozistory. Jejich teplotní závislost je vyjádřena exponenciální funkcí: R = R0.eB(1/T – 1/T0) kde R (Ω) je odpor termistoru při teplotě T (°K), R0 (Ω) je odpor termistoru při teplotě T0 (K), B je materiálová konstanta, závislá na teplotě T, složení a zpracování materiálu čidla.
 mají větší praktické využití než pozistory. Jejich teplotní závislost je vyjádřena exponenciální funkcí: R = R0.eB(1/T – 1/T0) kde R (Ω) je odpor termistoru při teplotě T (°K), R0 (Ω) je odpor termistoru při teplotě T0 (K), B je materiálová konstanta, závislá na teplotě T, složení a zpracování materiálu čidla.")
196
Typy vyráběných termistorů a) tyčinky b) destičky c až e) perličky
(převzato z Moderní měření a regulace energetických veličin)
")
197
Negastory se vyrábějí práškovou metalurgií ze směsi oxidů niklu, kobaltu, manganu, titanu, mědi, železa a jiných kovů. Jedná se příklad o Fe2O3+TiO2, MnO+CoO aj., kdy vylisované senzory se následně zpevňují slinováním za vysokých teplot. V případně karbidu (SiC) vyráběného napařováním na substrát je při 25° C odpor od 10 kΩ do 1 MΩ a rozsah použitelných teplot -100° C až +450° C.
 vyráběného napařováním na substrát je při 25° C odpor od 10 kΩ do 1 MΩ a rozsah použitelných teplot -100° C až +450° C..")
198
Radiační snímače Radiační snímače jsou bezdotyké. Při tomto měření je vyhodnocována energie elektromagnetického záření vysílaného povrchem tělesa jehož teplota je měřena. K tomu se využívá viditelná část spektra od 40 nm do 760 mn a též infračervená oblast do 30 μm. Tomu odpovídá rozsah teplot od -40° C do cca ° C. Vzhledem k tomu, že ne veškerá energie je měřícím čidlem pohlcena (část se odráží a vyzáří), je vyhodnocována jen pohlcená energie. Proto byl zaveden pojem absolutně černé těleso (není prakticky realizovatelné – je to ideál).
, je vyhodnocována jen pohlcená energie. Proto byl zaveden pojem absolutně černé těleso (není prakticky realizovatelné – je to ideál).")
199
Jako základní energetická veličina záření tohoto černého tělesa je celková intenzita tepelného vyzařování tohoto tělesa a závisí na jen na jeho absolutní teplotě a je úměrná jeho čtvrté mocnině (Stefan – Boltzmanův zákon) : Ic = σ.T4 Protože nemáte dostatečné matematické nástroje se s výpočty nebudeme zabývat. Proto obrátíme pozornost ke známému jevu, kdy víme, že při zvyšování teploty se nejprve vyzařuje dlouhovlnné záření (červený předmět), se zvyšováním teploty přechází od barvy rudé ke světle červené, ke žluté a čím dál světlejší barvě. Podle toho lze měřením úhrnné intenzity vyzařování Ic, nebo měřením intenzity vyzařování určité vlnové délky Iλt.
, se zvyšováním teploty přechází od barvy rudé ke světle červené, ke žluté a čím dál světlejší barvě. Podle toho lze měřením úhrnné intenzity vyzařování Ic, nebo měřením intenzity vyzařování určité vlnové délky Iλt.")
200
Podle způsobu takovéhoto bezkontaktního měření rozdělujeme do dvou skupin:
přímo měřící, které lze dále dělit na: radiační pyrometry celkového záření (úhrnné), monochromatické pyrometry pracující v omezeném rozsahu vlnových délek (spektrální) zobrazovací, což je termovize
, monochromatické pyrometry pracující v omezeném rozsahu vlnových délek (spektrální) zobrazovací, což je termovize.")
201
Radiační pyrometry Tyto pyrometry vyhodnocují dopadající záření na tepelná čidla v úplném spektru vlnových délek. Z toho pak vyplývá, že jsou citlivé na všechny vlnové délky. Je zde problém, že jednotlivé snímače mají malou citlivost, pak se musí jeden každý snímač začernit, umístit do ohniska zrcadel nebo optických soustav a navíc jsou tyto snímače zapojovány do série. Aby se zabránilo tepelným ztrátám je celý systém umístěn ve vakuové nádobě. Na obrázku baterie termočlánků zapojených do série

202
Monochromatické pyrometry
Tyto pyrometry vyhodnocují záření ve vlnových délkách od 10 nm do řádu μm a lze je rozdělit na: Jasové pyrometry, které využívají monochromatické záření ve viditelné oblasti v rozsahu teplot 650 až 3500 C. Pyrometr s mizejícím vláknem je vybaven: srovnávacím zdrojem záření (pyrometrická žárovka) vnitřní optikou červeným filtrem obvody pro modulaci jasu přijímacího nebo srovnávacího záření
 vnitřní optikou. červeným filtrem. obvody pro modulaci jasu přijímacího nebo srovnávacího záření.")
203
jas měřeného objektu se lidským okem přes filtr porovnává s jasem srovnávacího zdroje, což je dosaženo změnou žhavícího proudu vlákna žárovky, jehož teplota se zvyšuje do doby, než vlákno pozorovateli zmizí. Mírou teploty je proud procházející žárovkou. Ovládací prvek je přímo cejchován ve C. Pyrometry se šedým klínem mají: srovnávací zdroj má konstantní jas, klínový šedý filtr mění jas tělesa, měřící rozsah je 700 až 3500 °C podstatně delší životnost srovnávacího zdroje

204
Termovize Termovize je zařízení, které využívá ke zjišťování povrchové teploty tělesa (objektu) speciální snímací kameru, jež snímá teplotu v mnoha bodech současně. Z bodů se rekonstruuje obraz rozložení teplot, který se zobrazuje v barevném provedení na monitoru. Tak je umožněno zobrazení teplotního pole i pohybujících se součástí.
 speciální snímací kameru, jež snímá teplotu v mnoha bodech současně. Z bodů se rekonstruuje obraz rozložení teplot, který se zobrazuje v barevném provedení na monitoru. Tak je umožněno zobrazení teplotního pole i pohybujících se součástí.")
205
Snímače kinematických veličin

206
Snímače kinematických veličin
Jedná se o snímání rychlosti, kde rychlost je vektorová veličina definovaná jako přírůstek dráhy za jednotku času. Pro měření přímočarého pohybu (i kmitavého) lze použít elektromagnetický či elektrodynamický snímač. Pro snímání otáček lze použít několik druhů snímačů a to: elektrodynamické otáčkoměry, které mohou být: tachodynamo, tachoalternátor impulsní otáčkoměry stroboskopické otáčkoměry
 lze použít elektromagnetický či elektrodynamický snímač. Pro snímání otáček lze použít několik druhů snímačů a to: elektrodynamické otáčkoměry, které mohou být: tachodynamo, tachoalternátor. impulsní otáčkoměry. stroboskopické otáčkoměry.")
207
Tachodynamo Tachodynamo je vlastně komutátorový motor s kovovými kartáči s malým zvlněním výstupního proudu pod 6 %, upravený pro montáž na motor s vysokou vlastni frekvenci spoje přes 2 až 4.5 kHz. Jeho princip spočívá v tom, že se rotor otáčí v magnetickém poli tvořeném permanentními magnety a vodiči je toto napětí přiváděno na komutátor. Napětí je pak snímáno z kartáčů kontaktujících komutátor. Jejich výhodou je dostatečný výkon, nevýhodou pak zvlnění, problémy při komutaci a opotřebení kartáčů. Podle indukčního zákona kdy U = B.l.v je generováno napětí přímo úměrné otáčkám rotoru (otáčivé rychlosti ω).
.")
208
Tachodynama

209
Tachoalternátor s permanentním magnetem
Tachoalternátor je stroj jehož výstupem je střídavé napětí. Nemá komutátor a rotor je z realizován permanentním magnetem a stator je realizován vinutím, ze kterého se odebírá střídavé napětí. Pro to, aby se při zkratu nezeslabily permanentní magnety je mezi magnety a vinutím velká vzduchová mezera. Konstrukce je velmi robustní, ale při malých otáčkách měří protože se mění jak napětí, tak i frekvence.

210
Tachoalternátor s bubínkovým rotorem
Indukční tachoalternátor s bubínkovým rotorem pracuje na obdobném principu jako jednofázový indukční motor. Na statoru má 2 vinutí otočené vůči sobě o 90°. Jedno z nich je napájené střídavým napětím Un a druhé, ve kterém se indukuje výstupní střídavé napětí Uv. Jeden magnetický tok je indukován ve vodorovném směru a druhý pak vzniká díky tomu, že se Al bubínek otáčí v magnetickém poli prvého vinutí a v bubínku vznikají vířivé proudy indukující do snímacího vedení napětí Uv. Pokud se bubínek neotáčí, pak nevzniká magnetický tok Φind. Vířivé proudy indukují magnetický tok Φind úměrný budícímu toku ΦB a otáčkám Al rotoru. Takovéto Tachoalternátory se používají až asi do ot-1.

211
Tachoalternátor s rotačním bubínkem

212
Impulsní otáčkoměry U těchto impulsních otáčkoměrů počet impulsů odpovídá úhlu natočení. Bude-li mít kotouč 120 otvorů, pak 1 impuls představuje 3°. Pokud se při tom snímá počet impulsů za jednotku času, pak lze hovořit o úhlové rychlosti. Podle použitého kotouče pak rozeznáváme snímače : fotoelektrický snímač, kdy kotouč bude mít buď otvory, nebo výstupky a může být bd z folie (například realizované filmem s naexponovanými černými a průsvitnými body, plastový či kovový různého provedení jako otvory nebo zuby elektromagnetické, kotouč musí být feromagnetický se zuby a bude se jednat o elektromagnetický snímač s otevřeným magnetickým obvodem obdoba fotoelektrického snímače, kde místo optického snímače je použita cívka.

213
Fotoelektrický snímač otáček
magnetické s Hallovou sondou, pak kotouč se zuby musí být z feromagnetického materiál a zmagnetovaný. Fotoelektrický snímač otáček

214
Stroboskopické otáčkoměry
Tyto otáčkoměry pracují na principu pravidelného osvícení blikajícím světlem měřeného místa, což musí být rotační těleso. Pokud je měřené místo rovno násobku blikání, pak obraz rotujícího kotouče stojí na jednom místě, V opačném případě se posouvá jedním či druhým směrem v závislosti na tom, jsou-li otáčky vyšší nebo nižší než rytmus záblesků. V případě například trojnásobné rychlosti kotouče stojí na svém místě 3 značky na místo jedné apod.

215
Snímače přímočarého zrychlení

216
Snímače přímočarého zrychlení
Zrychlení se často udává jako násobek gravitačního zrychlení g (9,81 m/s2). Všechny snímače měří sílu F, která působí na setrvačnou hmotnost m. F = m . a Snímače přímočarého zrychlení jsou realizovány pomocí pružného materiálu (planžety či závěsu), na kterém je připevněno závaží. Při zrychlení nebo zpomalení dojde k vratné deformaci materiálu a změna polohy závaží je snímána některým ze snímačů, které již byly dříve probrány. Uvedené snímače měří nejen zrychlení, ale i vibrace.
. Všechny snímače měří sílu F, která působí na setrvačnou hmotnost m. F = m . a. Snímače přímočarého zrychlení jsou realizovány pomocí pružného materiálu (planžety či závěsu), na kterém je připevněno závaží. Při zrychlení nebo zpomalení dojde k vratné deformaci materiálu a změna polohy závaží je snímána některým ze snímačů, které již byly dříve probrány. Uvedené snímače měří nejen zrychlení, ale i vibrace.")
217
Tyto snímače se dále dělí na snímače :
elektrodynamické, které pracují na principu protínání magnetických siločar závity cívky, která se pohybuje v prstencové vzduchové mezeře permanentního magnetu. Pohybem cívky, která je spojena se seismickou hmotou, se v ní indukuje elektromotorická síla přímo úměrná rychlosti. Jedná se o snímač aktivní. Je to i snímač rychlosti kmitání měřící jen střídavou složku asi 1 Hz do 1 od kHz, má malý vnitřní odpor (cca 50 Ω), značnou citlivost, výstupní signál lze používat bez dalšího zesílení. Je citlivý na magnetické magnetické pole, teplotu a nárazy
, značnou citlivost, výstupní signál lze používat bez dalšího zesílení. Je citlivý na magnetické magnetické pole, teplotu a nárazy.")
218
elektromagnetické, které vyhodnocují změnu magnetickeho toku pomocí změny impedance magnetického obvodu. Princip uspořádání snímače kmitavého pohybu. Na jádře permanentního magnetu je nasazena cívka se zavity. V magnetickém poli se pohybuje feromagneticky prvek spojený s odměřovaným předmětem. Napětí ve snímací cívce je dáno časovou změnou toku Φ, řízeného magnetickým odporem vzduchové mezery. Změně její délky či průřezu odpovídá amplituda výstupního napětí. Vzhledem k jednoduchosti elektromagnetických snímačů nevyžadujících vnější napájecí zdroj je jejich hlavní užití při měřeni rychlosti

219
indukční, který měří pohyb seismické hmoty na principu změny indukčnosti cívky změnou délky zasunuté části feromagnetického jádra. Pro linearizaci průběhu se používá soustava dvou cívek v diferenciálním zapojení. Jedná se o snímač pasivní. uhlíkové pracující na principu povrchový odporu tenkých destiček uhlíku měnícího se změnou tlaku, kterým jsou destičky přitlačovány. Stykové odpory R1 a R2 jsou závislé na velikosti setrvačné síly F. To znamená, že v případě působením síly v jednom nebo druhém směru tělísko stlačí uhlíkové desky na jedné straně a odlehčí uhlíkové desky na straně druhé. Tím dojde ke změně odporu R1 a R2. Porovnáním jejich velikosti se určí hodnota zrychlení.

220
Uhlíkový snímač zrychlení
Moderní snímače jsou : piezoelektrické snímače, Hallovy sondy. Uhlíkový snímač zrychlení

221
Piezoelektrické snímače
Nejvýhodněji se používají piezoelektrické snímače, které působením síly vytváří na svém povrchu elektrický náboj. Síla způsobující změnu pohybu nebo vibrace působí na hmotu snímače stlačující piezoelektrický prvek generující elektrický náboj úměrný stlačení. Protože je elektrický náboj úměrný síle a hmota snímače je konstantní, pak elektrický náboj je úměrný zrychlení, nebo-li akceleraci. Protože piezoelektrické snímače mají vysoký vnitřní odpor, je doporučeno při snímání výstupního napětí umístit první oddělovací zesilovač co nejblíže ke snímači. Delší přívodní vodiče totiž zkreslují signál svou parazitní kapacitou (působí jako kapacitní dělič napětí), tak i svým parazitním činným odporem.
, tak i svým parazitním činným odporem.")
222
Výhodnější je však použít zesilovač náboje ukládající snímačem vytvářený náboj v kvalitním měřícím kondensátoru a tím udržuje samotný snímač bez náboje a napětí. V tomto případě je možné škodlivé parazitní vlivy přírodního vedení téměř potlačit, takže zesilovač nemusí být bezpodmínečně integrován se snímačem. Hmotnost akcelerometrů by měla být mnohem menší než hmotnost monitorovaného systému. Dynamický rozsah akcelerometru má být širší než je předpokládaný rozsah amplitudy, je to +/- maximální amplituda kterou lze změřit než se snímač poškodí. Je uváděn v násobku g.

223
Frekvenční odezva je určena hmotností snímače, který má piezoelektrické vlastnostmi krystalu a rezonanční frekvencí krytu snímače. Je to frekvenční rozsah, v němž výstupní hodnota signálu akcelerometru má dovolenou odchylku +/-5%. Frekvenční rozsah akcelerometru musí odpovídat předpokládanému rozsahu frekvence. Horní frekvenční limit je frekvence, kdy výstupní signál překročí dovolenou odchylku, což souvisí s mechanickou rezonancí snímače. Citlivost akcelerometru musí být dostatečná, aby výstupní signál byl kompatibilní s měřícími přístroji. Teplotní rozsah je limitován integrovaným obvodem převádějícím elektrický náboj na nízkoimpedanční výstup.

224
Síla způsobující změnu pohybu nebo vibrace působí na hmotu snímače, která pak stlačuje piezoelektrický prvek generující elektrický náboj úměrný stlačení. Protože je elektrický náboj úměrný síle a hmota snímače je konstantní, pak elektrický náboj je úměrný zrychlení.

225
Snímače s Hallovou sondou
Snímače s Hallovou sondou jsou založeny na tzv. Hallovu jevu, což je článek je tvořen tenkou polovodičovou obdélníkovou destičkou, která je opatřena dvěma páry kontaktů. Široké kontakty slouží pro přívod proudu, úzké a příčně uložené, slouží k odvádění výstupního Hallova napětí Uh. Pokud na destičku nepůsobí magnetické pole, jsou proudové čáry v destičce rozloženy rovnoměrně a Hallovo napětí Uh nevzniká. V magnetickém poli pak působí magnetická indukce na pohybující se nosiče náboje silou, která je kolmá ke směru jejich pohybu a stlačuje proudové čáry k jedné straně destičky. Následkem toho vzniká na úzkých kontaktech rozdíl potenciálů, což je Hallovo napětí Uh. Charakteristický je lineární vzrůst velikosti Hallova napětí naprázdno.

226
Čím je tenčí destička, tím je Hallova sonda citlivější
Čím je tenčí destička, tím je Hallova sonda citlivější. Proto jsou Hallovy sondy realizovány jako velmi tenké polovodičové pásky nebo polovodičové vrstvy nanesené na podložce. Takovým příkladem akcelerometru je použití v systému vozidla s protiblokovacím systémem ABS, regulací prokluzu ASR, které mají kromě snímačů kol Hallův snímač zrychlení k měření podélného a příčného zrychlení vozidla.

227
V Hallově snímači zrychlení se používá ,,elastické“ upevnění systémem pružina – hmota, což znamená pásková pružina umístěná nastojato, která je na jednom konci pevně upnuta. Na jejím volném konci je nasazen trvalý magnet jako seizmická hmotnost. Nad trvalým magnetem se nachází vlastní Hallův snímač s vyhodnocovací elektronikou. Pod magnetem je malá tlumící destička z mědi. Vychýlení je měřítkem pro zrychlení. Magnetický tok F vycházející z pohybující se magnetu vytváří v Hallově snímači Hallovo napětí Uh. Vyhodnocovací elektronikou z něj odvozené výstupní napětí stoupá lineárně se zrychlením (rozsah cca 1 g).
.")
228
Snímače hladiny

229
Snímače hladiny Výšku hladiny lze měřit a snímat různými způsoby a to od nejjednodušších plovákových až po elektronická zařízení, kterými se budeme nadále zabývat. V praxi měření hladiny rozděluje na měření: přímá, mezi něž patří průhledová okénka, stavoznaky a plovákové systémy, nepřímá, mezi něž patří využití změny hydrostatického tlaku, elektrodové systémy, radiační.

230
Další rozlišení může být založeno na vyhodnocení měření, kdy lze zjišťovat:
minimální a maximální hodnotu nebo-li limitní měření, kontinuální, kdy se průběžně sleduje hladina od nuly od maxima.

231
Kontinuální měření hladiny
Když pomineme plovákové systémy s nimiž se pro jejich jednoduchost nebudeme zde zabývat, pak velmi často se využívá snímače tlaku, kde se vychází ze vztahů pro hydrostatický tlak: p = F/S = h.r.g Je-li nádoba otevřená, můžeme hladinu měřit obyčejným tlakoměrem, který je ocejchován přímo v jednotkách výšky, je -li nádoba uzavřená použijeme diferenční způsob měření (jedno rameno nad kapalinou, druhé u dna). Při měření kapalin, popřípadě sypkých látek, které jsou vodivé můžeme použít elektrodové měření hladiny. Nejjednodušší je využití tří elektrod a hladinu udržíme na konstantní výši.
. Při měření kapalin, popřípadě sypkých látek, které jsou vodivé můžeme použít elektrodové měření hladiny. Nejjednodušší je využití tří elektrod a hladinu udržíme na konstantní výši.")
232
V chemickém průmyslu je pak lépe používat kapacitní snímání výšky hladiny. Změnou výšky hladiny se mění druh a výška dielektrika a tím i kapacita. Kapacitní snímač se zařazuje nejčastěji do jedné větve střídavého můstku. Tento způsob lze využít u sypkých látek. Kapacitní měření hladiny existuje v podobě limitní i kontinuální. V současné době se lze setkat s dalšími principy měření hladiny s využitím radiačního vysílače, ultrazvuku, infračervené světlo, popř.laseru.

233
Snímače hladiny se dělí na :
plovákové snímače, které sledují úroveň hladiny a pomocí mechanických převodů je pohyb převeden na změnu polohy, kapacitní snímače pracující na principu měření kapacity kondenzátoru částečně ponořeného do měřené látky, kterou může být kapalina, ale i sypký materiál (uhlí, obilí). Vnitřní elektrodou je kovová tyč, zastávajícího funkci druhé elektrody kondenzátoru od něj izolována nevodivým povlakem. Jestliže je měřená látka nevodivá, je vnější elektrodou vodivá válcová plocha nebo vodivý plášť nádoby. Pro volbu typu elektrody platí, že pro látky s měrným elektrickým odporem ρ> 107 Ωcm lze použít neizolovanou elektrodu. Hodnota kapacity snímače je většinou měřena pomocí střídavých můstků.
. Vnitřní elektrodou je kovová tyč, zastávajícího funkci druhé elektrody kondenzátoru od něj izolována nevodivým povlakem. Jestliže je měřená látka nevodivá, je vnější elektrodou vodivá válcová plocha nebo vodivý plášť nádoby. Pro volbu typu elektrody platí, že pro látky s měrným elektrickým odporem ρ> 107 Ωcm lze použít neizolovanou elektrodu. Hodnota kapacity snímače je většinou měřena pomocí střídavých můstků.")
234
hydrostatické snímače, určující nepřímo hladinu kapaliny měřením hydrostatického tlaku u dna nádoby. Přístroji jsou snímače tlaku připojené ke dnu nádrže. V tlakových nádobách se obvykle měří výška hladiny snímáním tlaku nad hladinou a u dna tak, aby se tak kompenzoval vliv statického tlaku. vodivostní hladinoměry, které jsou tvořeny elektrodami umístěnými v nádrži s vodivou kapalinou. Měří se změna elektrického odporu při změně výšky hladiny. Přesnost je silně závislá na změnách složení, vodivosti i teplotě média. Vodivostních snímačů se používá zejména k signalizaci mezních stavů a k dvoupolohové regulaci. Tento systém se běžně používá k signalizaci mezních stavů, případně k dvoupolohové regulaci.

235
ultrazvukové snímače, vyhodnocují úroveň hladiny včetně sypkých látek na základě časového intervalu mezi vysláním a přijetím ultrazvukového signálu měřenou látkou. Jeho výhodou je bezkontaktní měření v rozsazích až desítky metrů. Výměna snímače je možná za provozu zařízení. radioizotopové snímače, které pracují na principu vyhodnocení změny zářivého toku : jeho absorpcí průchodem proměnnou vrstvou měřeného prostředí, vlivem změny vzdálenosti mezi zdrojem a detektorem záření,

236
radarové snímače, rozdělujeme na:
bezkontaktní, kdy pulsní radar vyhodnocující standardním způsobem dobu mezi vysíláním a přijetím signálu je zatížen chybami vzniklými náhodnými signály (odrazy od stěn, dna) a proto se používají radary se spojitým frekvenčně modulovaným signálem (FMCW). Vysílaná frekvence radaru v určitém časovém intervalu lineárně roste v rozmezí jednotek GHz, to znamená, že radar je spojitě se přelaďujícím vysílačem elmg. vlnění. Přijímaná frekvence se tedy liší od právě vysílané frekvence a z jejich rozdílu lze získat nízkofrekvenční signál (kHz), jehož frekvence je úměrná vzdálenosti měřené hladiny od antény. kontaktní.
 a proto se používají radary se spojitým frekvenčně modulovaným signálem (FMCW). Vysílaná frekvence radaru v určitém časovém intervalu lineárně roste v rozmezí jednotek GHz, to znamená, že radar je spojitě se přelaďujícím vysílačem elmg. vlnění. Přijímaná frekvence se tedy liší od právě vysílané frekvence a z jejich rozdílu lze získat nízkofrekvenční signál (kHz), jehož frekvence je úměrná vzdálenosti měřené hladiny od antény. kontaktní.")
237
Kapacitní čidlo výšky hladiny
Toto čidlo slouží zásadně pro nevodivé materiály většinou kapalné, nebo sypké. V praxi často jednu elektrodu snímače tvoří svislá tyč a druhou elektrodou je stěna nádoby. Dielektrikem je nevodivá kapalina zaplavující při změně výšky hladiny elektrodu. V těch případech, kdy nádoba má nevhodný tvar, nebo je nádoba vyrobena z nevodivého materiálu, používá se jako druhé elektrody děrované trubice, obklopující tuto tyčovou elektrodu. Celková kapacita je dána součtem dvou dílčích kapacit je rovna C = CA + CB kde C = CA + CB = ε0.εA.(a.l/d) + ε0.εB.[a.(lmax – l)/d]
 + ε0.εB.[a.(lmax – l)/d]")
238
C = (aε0/d).[εBlmax + (εA – εB)]
a A je permitivita dielektrika použitého materiálu sloužící jako posuvné dielektrikum, B permitivita vzduchu, a je šířka desky, d je mezera mezi deskami. Po úpravě těchto vztahů C = (aε0/d).[εBlmax + (εA – εB)] C = k1 + k2.l Pokud se používá elektricky vodivých kapalin, je kovová tyčová elektroda opatřena izolačním nevodivým povlakem (např. teflon) tvořící dielektrikum. Vodivá kapalina pak představuje druhou elektrodu, jejíž plocha je závislá na výšce hladiny.
![C = (aε0/d).[εBlmax + (εA – εB)]](http://slideplayer.cz/slide/11150032/41/images/238/C+%3D+%28a%CE%B50%2Fd%29.%5B%CE%B5Blmax+%2B+%28%CE%B5A+%E2%80%93+%CE%B5B%29%5D.jpg "a A je permitivita dielektrika použitého materiálu sloužící jako posuvné dielektrikum, B permitivita vzduchu, a je šířka desky, d je mezera mezi deskami. Po úpravě těchto vztahů. C = (aε0/d).[εBlmax + (εA – εB)] C = k1 + k2.l. Pokud se používá elektricky vodivých kapalin, je kovová tyčová elektroda opatřena izolačním nevodivým povlakem (např. teflon) tvořící dielektrikum. Vodivá kapalina pak představuje druhou elektrodu, jejíž plocha je závislá na výšce hladiny.")
239
Kapacitní čidlo s proměnnou permitivitou

240
Ultrazvukové hladinoměry
Princip těchto hladinoměrů je založen na měření délky dráhy ultrazvukového impulsu mezi vysílačem a přijímačem. Ta se měří tak, že se ultrazvukový impuls odráží od fázového rozhraní a měření délky dráhy se převádí na měření času. Senzor stavu hladiny tvoří: generátor a vysílač ultrazvukového signálu, přijímač ultrazvuku a zesilovač signálu, elektronické vyhodnocovací zařízení.

241
Snímač se skládá vždy z vysílače a přijímače ultrazvukových impulsů pracující na piezoelektrickém principu, který tvoří konstrukční celek. Takovýto snímač bývá umístěn v horní části nádrže. Na počátku měřicího cyklu je vyslán z vysílače ultrazvukový impuls, který se po odrazu od hladiny vrací k přijímači. Čas t naměřený elektronickým obvodem závisí na velikosti dráhy ultrazvuku, a tím i na stavu hladiny. Výška hladiny se vyhodnocuje na základě vztahů: l = c.t/2 hmax = lmax – c.t/2

242
kde c je rychlost šíření zvuku v konkrétním prostředí (m
kde c je rychlost šíření zvuku v konkrétním prostředí (m.s-1), t je čas (sec), l vzdálenost hladiny od snímače (m) a lmax výška nádrže (m). Naměřený údaj je ovlivněn řadou faktorů jako teplotou prostředí, přítomností dalších předmětů, tvarem nádrže, případným pohybem hladiny apod. Proto se u přesných hladinoměrů zavádí korekční obvody.
, t je čas (sec), l vzdálenost hladiny od snímače (m) a lmax výška nádrže (m). Naměřený údaj je ovlivněn řadou faktorů jako teplotou prostředí, přítomností dalších předmětů, tvarem nádrže, případným pohybem hladiny apod. Proto se u přesných hladinoměrů zavádí korekční obvody.")
243
Radarové pulsní snímače hladiny
Radarové pulsní snímače hladiny využívají podobný princip jako ultrazvukové hladinoměry s tím rozdílem, že místo akustického signálu používají elektromagnetické vlnění šířící se prostředím rychlostí světla. Měří se čas potřebný k průchodu elektromagnetických vln z vysílače k hladině a zpět k přijímači. Jeho frekvence je v řádu desítek GHz. Metoda je velmi náročná na přesné měření času.

244
Frekvenční metoda Tato metoda je založena na založená na vysílání spojitého signálu, který má proměnnou frekvenci. Vysílaný signál mění plynule svoji frekvenci od fmin do fmax. Ze známé rychlosti přelaďování a změřených hodnot frekvencí vyslaného a přijatého signálu v čase t1 je možno vypočítat vzdálenost odpovídající výšce hladiny. Ze zjištěných rozdílů frekvence se stanoví odpovídající rozdíl času a vypočte se vzdálenost hladiny. Tento frekvenční rozdíl je možno změřit velmi přesně, což umožňuje stanovit výšku hladiny s přesností až na 1 mm.

245
Izotopové hladinoměry
Tyto hladinoměry pracují na tom principu, že intenzita radioaktivního záření klesá úměrně s tloušťkou vrstvy materiálu mezi zářičem a detektorem. Velkou nevýhodou je nutnost ochrany obsluhy před účinky radioaktivního ozáření. Aplikace těchto přístrojů přichází proto v úvahu tehdy, když není možno užít jiných metod, tj. např. při měření látek silně agresivních, viskózních, při extrémně vysokých tlacích a teplotách. Používají se zářiče s dlouhým poločasem rozpadu jako je Co 60 či Cs 137. Zářič je umístěn většinou na dně nádrže a snímač (detektor) v horní části. Gama paprsky pronikají materiálem, ale nemají schopnost vyvolávat jeho radioaktivitu, takže je lze používat i v potravinářském průmyslu
 v horní části. Gama paprsky pronikají materiálem, ale nemají schopnost vyvolávat jeho radioaktivitu, takže je lze používat i v potravinářském průmyslu.")
246
Dobrou předností použití gama paprsků pro měření hladiny kapalin a sypkých látek je možnost použití zářiče i přijímače vně stěn zásobníku, kde detektorem je například Geiger-Müllerova trubice. Zářič v ochranném pouzdře i detektor jsou instalovány na vnějším plášti zásobníku.

247
Snímače průtoku kapalin a plynů

248
Snímače průtoku kapalin a plynů
Snímače průtoku kapalin a plynů určují: objemové množství Qv [m3s-1] tekutiny nebo plynu, hmotnostní množství QM [kg.s-1] tekutiny nebo plynu proteklé zvoleným průřezem S za časovou jednotku. Platí vztahy : Qv = V/t = vstř . S [m3.s-1] QM = m / t = vstř . S .θ [kg.s-1] Dělí se podle zpusobu měření na: nepřímé měření, kde se provádí výpočet z rychlosti a typu proudění, přímé měření, kdy dávkovací snímač počítá množství protékající kapaliny

249
Rozdělení těchto snímačů je následující:
rychlostní snímače, vyhodnocují průtok nepřímo měřením střední rychlosti proudu tekutiny závisící na typu proudění charakterizovaným Reynoldsovým číslem (Re) podle rychlostního profilu a které mohou být: průřezové využívající poklesu tlaku vzniklého zvýšením rychlosti proudění ve zúženém místě průřezu potrubí, které se dále dělí na: kruhovou centrickou clonu, je velmi levná, velmi používaná a výrobně nejjednodušší. Ta způsobuje tlakovou ztrátu, ale vyžaduje čisté tekutiny
 podle rychlostního profilu a které mohou být: průřezové využívající poklesu tlaku vzniklého zvýšením rychlosti proudění ve zúženém místě průřezu potrubí, které se dále dělí na: kruhovou centrickou clonu, je velmi levná, velmi používaná a výrobně nejjednodušší. Ta způsobuje tlakovou ztrátu, ale vyžaduje čisté tekutiny.")
250
dýza ISA 1932 používaná při větších požadavcích na přesnost nebo při měření ve velmi náročných provozních podmínkách Venturiho trubice, což je obdoba dýzy plovákové snímače nebo též rotametry, pracující na principu udržování konstantního tlakového rozdílu při proměnlivém škrcení průtočného průřezu. ve svislé kuželové trubce je proudící tekutinou nadzvedáván plovák. Plovák je šikmo rýhovaný a vlivem proudění tekutiny rotuje, čímž se jeho poloha stabilizuje při čemž je unášen do polohy, kde nastane rovnováha mezi dynamickým působením tekutiny a tíhou plováku. Vyhodnocení výškové polohy plováku se provádí snímači polohy (např. transformátorovým snímačem).
.")
251
turbínkové snímače využívající kinetickou energii kapaliny k uvedení rotoru do otáčivého pohybu rychlostí úměrné střední rychlost vstř kapaliny protékající příčným průřezem snímače. Otáčky rotoru jsou snímány elektronicky indukčním snímačem. indukční snímač využívá Faradayův zákon o indukci napětí ve vodiči při jeho pohybu v magnetickém poli. Proudící kapalina se chová jako proudová vlákna pohybující se rychlostí kolmo k vektoru magnetické indukce B. Průtokem kapaliny se indukuje na dvojici elektrod, jejichž spojnice je kolmá k vektorům B, výstupní napětí je pak rovno Uvýst = B.l.v

252
je odolný proti rušivým vlivům kako je teplota a tlak,
Indukční průtokoměr neobsahuje žádné pohyblivé prvky, může tedy pracovat v libovolné poloze, nevzniká v něm tlaková ztráta jako při použití škrtících orgánů a navíc je jeho charakteristika lineární s citlivostí řádově 1mV/ms-1 při přesností 1%. ultrazvukový snímač vyhodnocuje signály na základě změn rychlosti šíření ultrazvukových vln při jejich pohybu ve směru a proti směru proudění kapaliny. Jeho výhody jsou následující: neobsahuje žádné pohyblivé prvky a je použitelný i pro znečištěná média je odolný proti rušivým vlivům kako je teplota a tlak, umožňuje dodatečné měření bez rozpojení potrubí

253
vířivé a vírové snímače využívající vzniku vírů a tím i vzniku tlakových pulsací na překážce a to většinou lichoběžníkového tvaru, která je vložená do proudu tekutiny. Na odtokové straně překážky dochází ke spirálovitému pohybu tekutiny a tím vzniku střídavého obtékání překážky. Frekvence oscilací proudu je úměrná rychlosti tekutiny obtékající překážku a je detekována coby změna tlaku tenzometrickými, piezoelektrickými nebo kapacitními snímači tlaku. Slouží především pro páry a plyny. Tyto průtokoměry jsou jednoduché, s velkou přesností, velkým měřicím rozpětím, velmi malou trvalou tlakovou ztrátou, dlouhodobou stabilitou a dlouhou dobou života a výstupem frekvenčním nebo proudovým;

254
tepelné, což je vlastně anemometrický snímač, který využívá poznatku, že odběr tepla z ohřátého tělesa, které je vloženo do proudu tekutiny či plynu je tím větší, čím rychleji kolem něj tekutina proudí. Jsou používány odporové snímače v můstkovém zapojení. objemové snímače, která mohou sloužit jako: dávkovací snímače, plynoměry hmotnostní snímače - Coriolisův snímač

257
Snímače objemové

258
Lopatkové snímače Lopatkové kolo se roztáčí protékající kapalinou a jeho otáčky se snímají buď mechanicky, nebo elektronicky. U elektronického čtecího zařízení se velmi často využívá Hallovy sondy a to tak, že na konci lopatek jsou malé permanentní magnety, které při otáčení iniciují Hallovu sondu.

259
Objemové průtokoměry plynů
Objemový průtok plynů je definován jen při udání měrné hmoty nebo měrném objemu plynu při průchodu průřezem. Při měření objemového průtoku se zjišťuje tlak a teplota plynu při známém chemickém složení plynu. Objemový průtok se pak přepočítává na normální podmínky a vyjadřuje se v normálních metrech krychlových za jednotku času. Závislosti základních fyzikálních parametrů, jsou pro technické použití uvedeny v tabulkách a grafech. Takovýto objemový průtokoměr pracuje na principu plnění a vyprazdňování komor definovaného objemu tak, aby průtok snímačem byl plynulý a měření spojité. Výstupem průtokoměru jsou impulsy indukčního snímače například otáček rotujících pístů, z nichž lze převodníkem frekvence/napětí odvodit okamžitý objemový průtok Qv a integrací otáček celkově proteklé množství tekutiny.

260
Plynoměry Plynoměry lze rozdělit na:
zvonový plynoměr, který je tvořen nádrží s kapalinou, do které je ponořen zvon vyvažovaný protizávažím. Do tohoto uzavřeného prostoru pod zvonem se přivádí plyn, který zvedá zvon. Změna výšky zvonu za časovou jednotku pak udává objemový průtok plynu. měchový plynoměr, který má měrný prostor rozdělen měchem (membránou) na dvě komory jejichž plnění a vyprazdňování přepíná šoupátkový rozvod.
 na dvě komory jejichž plnění a vyprazdňování přepíná šoupátkový rozvod.")
261
Anemometry Anemometry dělíme na: mechanické snímače,
aerodynamické snímače, zchlazovací snímače, akustické snímače, ultrazvukové snímače snímače založené na principu Doppelerova jevu

262
Mechanické a aerodynamické snímače
Mechanické snímače nebo-li turbinové přenáší energii větru na konstrukci, kterou vítr otáčí, rotuje či vychyluje z ustálené polohy. Mezi mechanické anemometry patří: miskové anemometry, jako je Robinsonův kříž lopatkové anemometry, anemometry s výkyvnou deskou U aerodynamických snímačů je tlak proudícího vzduchu přenášen a porovnáván s tlakem statickým.

263
Zchlazovací snímače Termoanemometr je elektricky vyhřívaná sonda, která je vložena do potrubí, ve kterém proudí plyn (tekutina). Množství tepla odebíraného na sondě plynem je závislé na rychlosti proudění, hustotě, tepelné vodivosti a na teplotě proudícího média, kterou je potřeba měřit. Čidlem termoanemometrů bývá platinový drátek o průměru 0,01 až 0,1 mm, který je žhavený na teplotu 200 až 500°C. Podle velikosti proudu lze určit rychlost protékajícího plynu, případně hmotnostní průtok. Obdobný systém čidla je termoanemometr, který má sondu vyhřívanou konstantním elektrickým proudem, kdy se změnou průtoku se mění teplota sondy. Zde se snímá velikost napětí, jenž je úměrná hmotnostnímu průtoku.
. Množství tepla odebíraného na sondě plynem je závislé na rychlosti proudění, hustotě, tepelné vodivosti a na teplotě proudícího média, kterou je potřeba měřit. Čidlem termoanemometrů bývá platinový drátek o průměru 0,01 až 0,1 mm, který je žhavený na teplotu 200 až 500°C. Podle velikosti proudu lze určit rychlost protékajícího plynu, případně hmotnostní průtok. Obdobný systém čidla je termoanemometr, který má sondu vyhřívanou konstantním elektrickým proudem, kdy se změnou průtoku se mění teplota sondy. Zde se snímá velikost napětí, jenž je úměrná hmotnostnímu průtoku.")
264
Kalorimetrické průtokoměry
Kalorimetrické průtokoměry mají zdroj tepla umístěn do středu proudového profilu a teplota se snímá před a za tímto zdrojem tepla. Jedná se vlastně o dva teploměry (suchý a vlhký), u nichž se měří rychlost zchlazování. Ta je odvislá od teploty okolí a rychlosti větru. V potrubí jsou umístěny dva čidla, což jsou odporové teploměry jejichž poměr odporů je rozdílný. Obdobně je hodnota proudu IP je výrazně větší a ohřívá odpor RP teploměru. Odpor RT má teplotu okolního média. Napájecí proud i je mírou průtoku větrů, přičemž regulační obvod, který udržuje teplotu vyhřívaného čidla na konstantní hodnotě. Průtok je tak vlastně určen z rozdílu teplot.
, u nichž se měří rychlost zchlazování. Ta je odvislá od teploty okolí a rychlosti větru. V potrubí jsou umístěny dva čidla, což jsou odporové teploměry jejichž poměr odporů je rozdílný. Obdobně je hodnota proudu IP je výrazně větší a ohřívá odpor RP teploměru. Odpor RT má teplotu okolního média. Napájecí proud i je mírou průtoku větrů, přičemž regulační obvod, který udržuje teplotu vyhřívaného čidla na konstantní hodnotě. Průtok je tak vlastně určen z rozdílu teplot.")
265
Princip kalorimetrického průtokoměru

266
Akustické, ultrazvukové a jiné snímače

267
Akustické snímače U akustických snímačů se měří nebo odvozuje rychlost i směr větru ze změn šíření zvuku v atmosféře. Jde např. o ultrazvukové anemometry.

268
Ultrazvukové snímače Základní části ultrazvukového snímače je měřící systém, který je umístěný ve dvoudílné rouře. Měřící systém tvoří dva ultrazvukové snímače sloužící současně jako vysílací a snímací, upevněné na koncích držáků zabudovaných v rouře, která je chrání před mechanickým poškozením. Musí být umístěn tak, aby se proudění ovzduší blížilo co nejvíce laminárnímu proudění a je nutno se vyhýbat místům, kde dochází k turbulencím nebo jiným dynamickým vlivům, majícím vliv na přesnost měření. Jeho použití je hlavně v dolech a ve všech prostorách s nebezpečím výbuchu metanu a různých explosivních prachů.

269
Ukázka ultrazvukového snímače AS-3

270
Snímače založené na principu Doppelerova jevu
Snímače založené na principu Doppelerova jevu jsou laserové anemometry. Zde se laserový paprsek opticky rozděluje na dvě části se stejnou frekvencí, které se sbíhají v bodě měření rychlosti tekutiny. Při interakci světla laseru s mikroskopickými částicemi obsaženými v měřené tekutině, dochází k rozptylu světla v bodě, kde se stýkají paprsky.

271
Rozptýlené světlo má po interakci s pohybujícími se částicemi jinou frekvenci. Světlo směřující po proudu média má frekvenci vyšší, přičemž světlo rozptýlené proti proudu média mí frekvenci nižší. Světlo z obou paprsků vzájemně interferuje a vytváří třetí frekvenci, která je přímo úměrná rychlosti kolmé na osu úhlu obou paprsků.

272
Snímače vlhkosti Vlhkost vzduchu udává obsah vodní páry v jednotkovém objemu vzduchu, který je v reálném stavu směsí suchého vzduchu a vodní páry, přičemž je závislá na teplotě. Jedná se o používanou veličinu jíž je vlhkost (vzdušná, vlhkost plynů, různých hmot apod.). V praxi se uplatňuje při regulaci klimatizace. Je to jeden z hlavních činitelů ovlivňujících tepelný faktor prostředí (dále je to teplota vzduchu, vyzařování tepla a rychlost vzduchu).
. V praxi se uplatňuje při regulaci klimatizace. Je to jeden z hlavních činitelů ovlivňujících tepelný faktor prostředí (dále je to teplota vzduchu, vyzařování tepla a rychlost vzduchu).")
273
Při měření vlhkosti se používá některá z následujících jednotek:
relativní vlhkost (%, někdy i %rH, což jsou % relative Humidity), která se vyjadřuje procentem nasycení suchého vzduchu vodními parami při dané teplotě φ = pp/pp“ = (Φ/Φ“).100% kde platí , že pp je parciální tlak par ve vzduchu, p"p je tlak sytých par při téže teplotě, Φ je absolutní vlhkost vzduchu, Φ” je absolutní vlhkost nasyceného vzduchu. Při tom platí, že p = (pp – pc)/(pc –pp“) kde pc je celkový tlak směsi suchého vzduchu a vodní páry.
, která se vyjadřuje procentem nasycení suchého vzduchu vodními parami při dané teplotě. φ = pp/pp = (Φ/Φ ).100% kde platí , že pp je parciální tlak par ve vzduchu, p p je tlak sytých par při téže teplotě, Φ je absolutní vlhkost vzduchu, Φ je absolutní vlhkost nasyceného vzduchu. Při tom platí, že. p = (pp – pc)/(pc –pp ) kde pc je celkový tlak směsi suchého vzduchu a vodní páry.")
274
absolutní vlhkost f (kg. m-3) či (g
absolutní vlhkost f (kg.m-3) či (g.m-3) je hmotové množství vodní páry obsažené v objemu 1 m3, nebo-li měrná hmotnost pp. měrná vlhkost c (kg.kg-1) je hmotové množství vodní páry připadající na 1 kg suchého vzduchu, vlastně vodní obsah. χ = mp/mv kde mp je hmotnost vodní páry, mv je hmotnost suchého vzduchu.
 či (g.m-3) je hmotové množství vodní páry obsažené v objemu 1 m3, nebo-li měrná hmotnost pp. měrná vlhkost c (kg.kg-1) je hmotové množství vodní páry připadající na 1 kg suchého vzduchu, vlastně vodní obsah. χ = mp/mv. kde mp je hmotnost vodní páry, mv je hmotnost suchého vzduchu.")
275
log EW = 0,66077 + (0,75.t/(237,3 + t)) + (log10(RH- 2))
teplota rosného bodu je teplotou, při které již vzduch není schopen přijímat žádnou páru. Ze znalosti relativní vlhkosti a teploty lze vypočítat rosný bod následovně log EW = 0, (0,75.t/(237,3 + t)) + (log10(RH- 2)) DP = ((0,66077 – log EW).237,3)/(log EW – 8,16077) kde EW je hodnota mezivýpočtu, tj. naměřená teplota (°C), RH je relativní vlhkost (%) a DP je rosný bod.
) + (log10(RH- 2)) DP = ((0,66077 – log EW).237,3)/(log EW – 8,16077) kde EW je hodnota mezivýpočtu, tj. naměřená teplota (°C), RH je relativní vlhkost (%) a DP je rosný bod.")
276
Snímače vlhkosti fy Honyvell

277
Bezkontaktní měření elektrického proudu a napětí

278
Bezkontaktní měření elektrického proudu a napětí
Pro takováto měření lze použít Hallovu sondu, pomocí níž lze měřit magnetického pole vznikající kolem vodiče při průtoku elektrického proudu. Snímač je tvořen úzkou polovodičovou destičkou, skrz níž prochází proud. Při vložení destičky do magnetického pole skrz ní prochází indukční tok a přeskupuje náboje v destičce na jednu stranu. Tak na Hallově článku vzniká napětí. Používá se pro měření a automatickou regulaci magnetických polí, měření velkých stejnosměrných proudů 0,5 až A, ovládání velkých elektromotorů a jiných spotřebičů.

279
Nejčastěji je tvořena tenkou destičkou polovodiče například InSb, InAs (R = 0,01 až 20 Ω a tloušťky cca 0,1 mm) obdélníkového tvaru. Držák destičky nesmí být z feromagnetického materiálu. Destička má 2 páry kontaktů a to široký sloužící pro přívod proudu a úzký k odebírání výstupního Hallova napětí. Dále pracuje tak jak bylo uvedeno v kapitole snímače s Hallovou sondou.

280
Pro měření se využívá dvou zapojení:
otevřená smyčka (open loop), uzavřená smyčka (closed loop). Pomocí obou zapojení lze měřit stejnosměrný i střídavý proud ve frekvenčním rozsahu do několika desítek kHz. Princip měření využívá Biot-Savartova zákona. Tyto snímače vykazují prakticky nulové ztráty v měřeném obvodu.
, uzavřená smyčka (closed loop). Pomocí obou zapojení lze měřit stejnosměrný i střídavý proud ve frekvenčním rozsahu do několika desítek kHz. Princip měření využívá Biot-Savartova zákona. Tyto snímače vykazují prakticky nulové ztráty v měřeném obvodu.")
281
Snímače proudu s otevřenou smyčkou (O/L)
Technologie s využitím Hallovy sondy v otevřené smyčce je využita především u snímačů s menšími požadavky na přesnost a dynamiku měření. Magnetický tok vytvářený primárním proudem IP je koncentrován v magnetickém obvodu snímače. Jeho velikost je měřena ve vzduchové mezeře magnetického obvodu s využitím Hallovy sondy. Signál z Hallovy sondy je zesílen tak, aby bylo dosaženo úměry mezi primárním proudem a napětím na výstupu snímače. Časový průběh výstupního napětí tak kopíruje časový průběh primárního proudu.

282
Jejich vlastnosti jsou:
malá konstrukční velikost, velký měřicí rozsah, minimální hmotnost, nízká spotřeba, měření bez přídavných ztrát

283
a) Snímač proudu s Hallovou sondou
a) b) a) Snímač proudu s Hallovou sondou b) Kompenzovaný snímač proudu s Hallovou sondou (Oba obrázky použity z firemní literatury LEM Components zastoupené
 b) a) Snímač proudu s Hallovou sondou. b) Kompenzovaný snímač proudu s Hallovou sondou. (Oba obrázky použity z firemní literatury LEM Components zastoupené")
284
Snímače proudu s uzavřenou smyčkou (C/L)
U snímačů s uzavřenou smyčkou je jádro snímače doplněno o kompenzační vinutí, které svou polaritou potlačuje magnetický tok vytvářený primárním vodičem. Hallova sonda v tomto případě slouží měření výsledného pole tvořeného rozdílem pole primárního vodiče a pole kompenzačního vinutí. Při vyrovnání těchto magnetických polí v jádře tak prochází kompenzačním vinutím proud vázaný na primární proud počtem závitů kompenzační cívky. Tento proud na výstupu snímače reprezentuje průběh a velikost primárního proudu, takže snímač se chová jako transformátor proudu již od stejnosměrných hodnot proudu.

285
Jejich vlastnosti jsou:
široké frekvenční rozsah, velmi dobrá celková přesnost, krátká doba odezvy, nízký teplotní drift, výborná linearita, nevnáší do měřeného obvodu přídavné ztráty

286
Snímače proudu s uzavřenou smyčkou a kompenzací (C/L)
U snímačů s uzavřenou smyčkou je jádro snímače doplněno o kompenzační vinutí, které svou polaritou potlačuje magnetický tok vytvářený primárním vodičem. Hallova sonda v tomto případě slouží měření výsledného pole tvořeného rozdílem pole primárního vodiče a pole kompenzačního vinutí. Při vyrovnání těchto magnetických polí v jádře tak prochází kompenzačním vinutím proud vázaný na primární proud počtem závitů kompenzační cívky. Tento proud na výstupu snímače reprezentuje průběh a velikost primárního proudu, takže snímač se chová jako transformátor proudu již od stejnosměrných hodnot proudu.

287
Jejich vlastnosti jsou:
široké frekvenční rozsah, velmi dobrá celková přesnost, krátká doba odezvy, nízký teplotní drift, výborná linearita, nevnáší do měřeného obvodu přídavné ztráty.

288
Snímače napětí s uzavřenou smyčkou (C/L)
Princip snímače napětí s Hallovou sondou vychází z principu snímače proudu s uzavřenou smyčkou. V tomto případě je vstupní měřené napětí převedeno prostřednictvím primárního odporu R1 na primární proud, který napájí primární cívku snímače. Magnetické pole primární a kompenzační cívky působí proti sobě a jejich rozdíl je opět detekován Hallovou sondou. Výstupem snímače je opět proud kompenzační cívky. Jeho velikost je určena poměrem závitů obou cívek a velikostí primárního odporu R1.

289
Jejich vlastnosti jsou:
měření velkých napětí, bezpečná izolace, dobrá celková přesnost, nízký teplotní drift, výborná linearita.

290
Snímač napětí s Hallovou sondou
(Obrázek použit z firemní literatury LEM Components zastoupené

Podobné prezentace

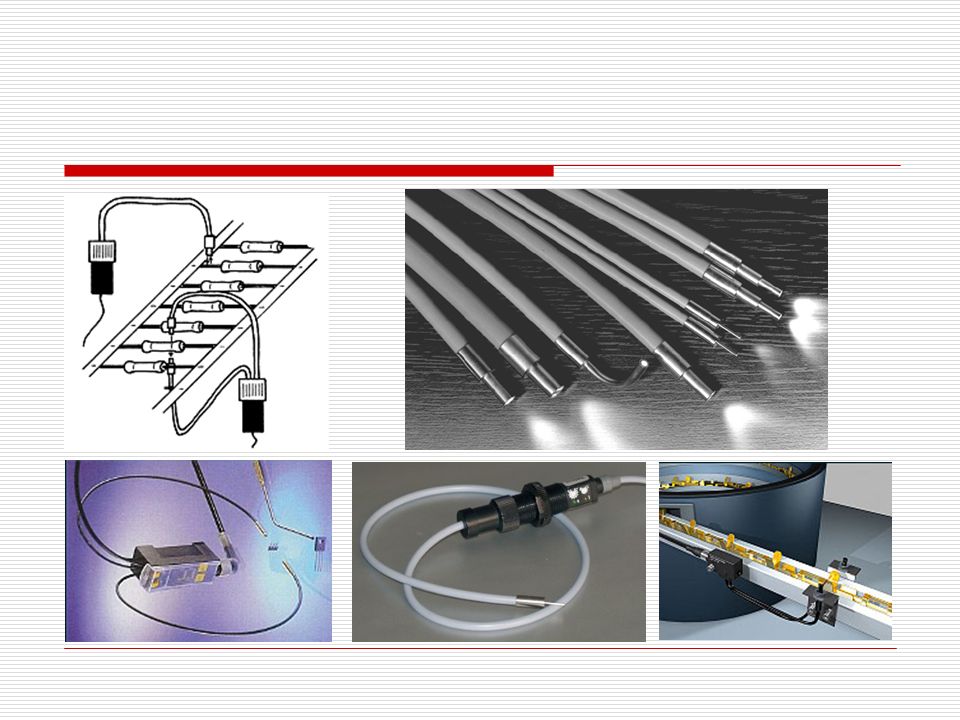
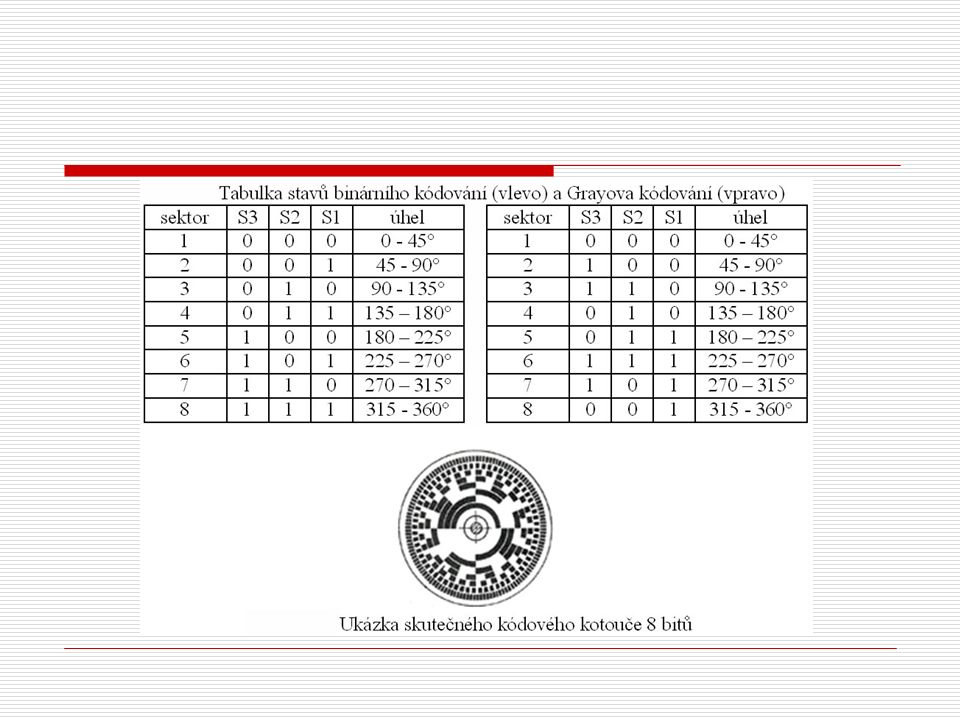
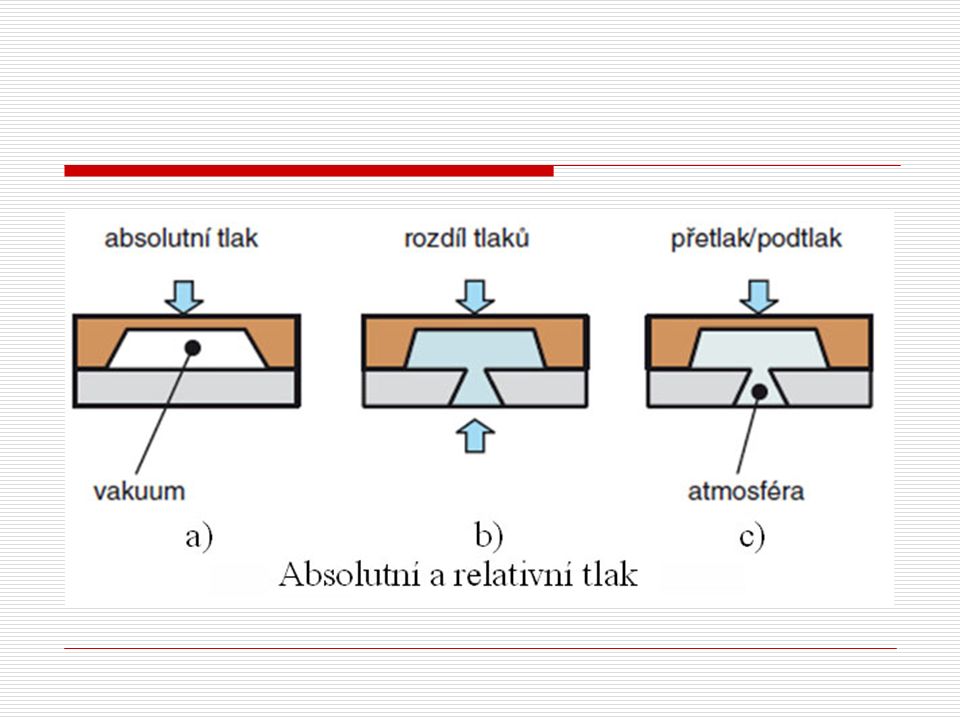
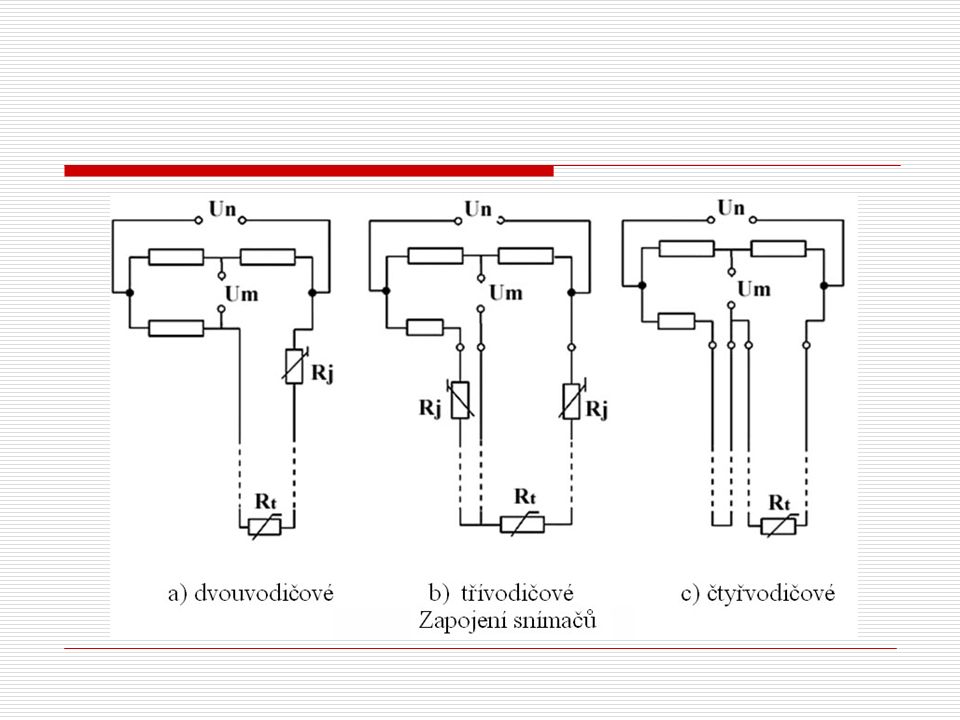

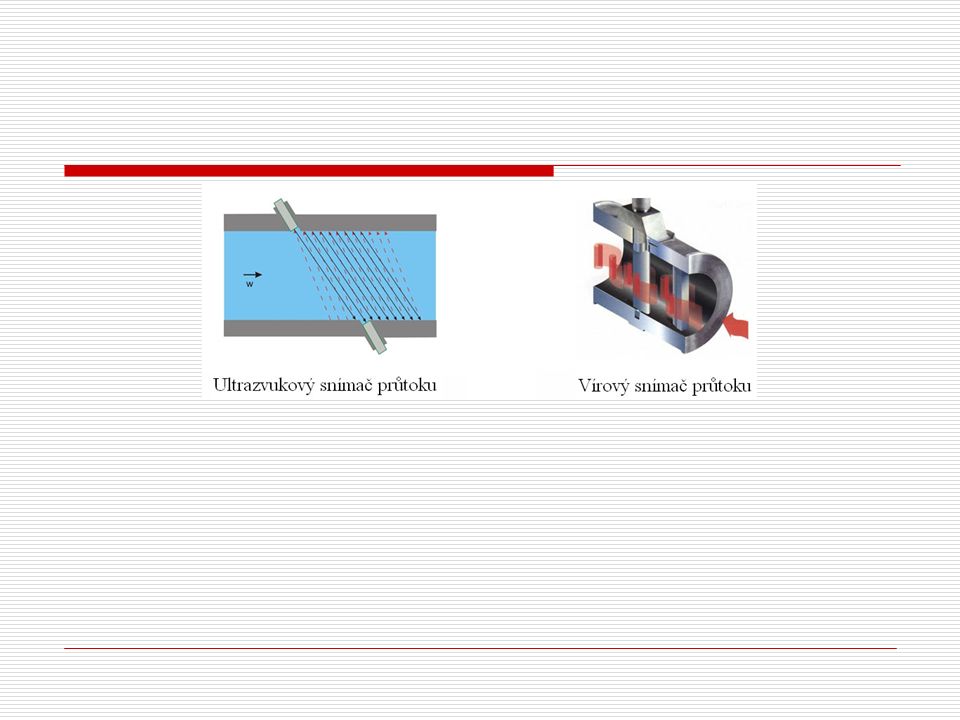











 technická.>")


.>")

 snímače>")


